Can someone help me replicate how the Loki attaches to the Phantom 4 pro to geo-tag the images with precise timing?
“LOKI is self-contained and uses an internal battery (charged via a USB port). It has been designed to survive most crashes and easily can be moved to a new, replacement drone. LOKI interfaces to the DJI series drones by simply plugging a personality cable into the DJI drone SD card slot, making it a user installable “plug and play” system.”
I have been looking at the Loki System. I’m a little surprised Emlid isn’t further along in getting their system to work with DJI products. Course it has to be somewhat of an integrated system for the hardware and sw that processes the PPK into a format for the sfm sortware such as Photoscan or Pix 4d. My understanding is that the timing with the phantom 4 pro is difficult but the inspire 2 is working quite well. I guess because the inspire has a detachable camera and hot shoe?
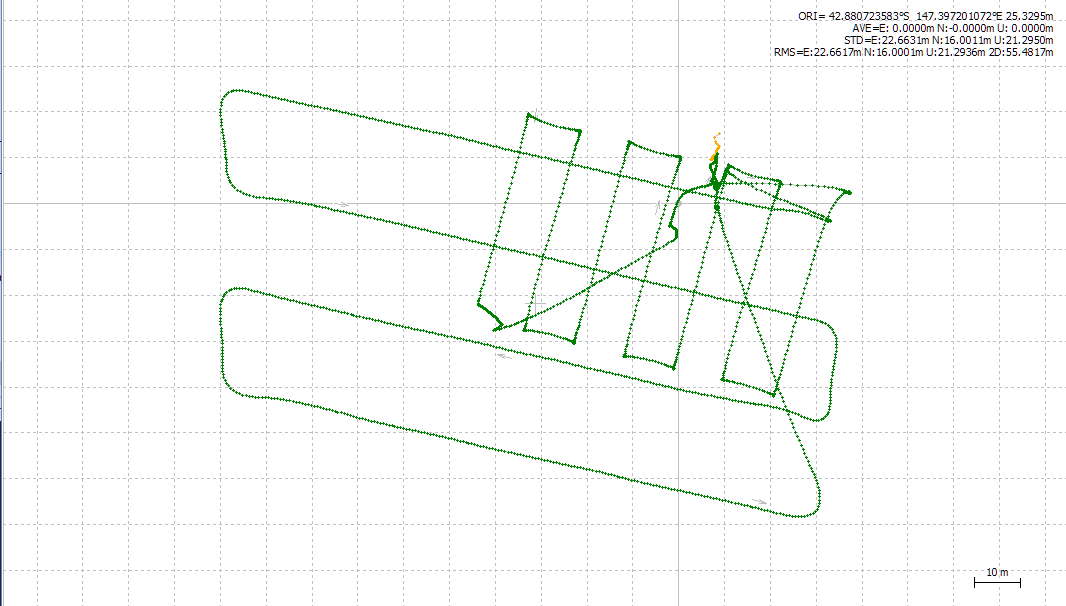
Just thought I would share today’s mission with an Emlid Reach on a Phantom4. 100% fix for all air time. 100% synchronisation between DJI images and Reach events. 100% insertion of reach positions into EXIF headers. I would consider this integrated.
Results speak for themselves. Timing is captured using a neat little device I have created (and am selling) that is not invasive so does not break your DJI warranty.
Will the Loci GPS work with the Emlid RS base station? I would also be interested in getting pricing on device to integrate the Reach to the Phantom 4.
Depends on the ‘degree of integration’ If you want an RTK GNSS to replace the onboard GNSS then wait a while and see what DJI come up with. If you want Reach mounted on your Phantom in addition to the onboard GNSS and to use it for accurate Geotagging then that is what I am doing and an increasing number of individuals are doing.
Simon
Simon,
I’m also interested in information and pricing on your phantom / reach integration. In my area we have a regional NTRIP reference network that provides VRS_RCTM23 or VRS_RCTM31 network solutions that I have access to.
Likely using a 3DR radio or similar. I’m considering mounting the phone on the drone so the correction data is onboard and connected via Bluetooth or cable. What would you suggest?
Just curious that’s all. Wasn’t sure if the added 3dr radio would add more interference to the platform. Two on board radio systems, and two on board GPS systems, just thinking out load.