



-
Nothing changes in RINEX other than that marker in the header that OPUS doesn’t use.
-
This may depend on what you mean by output. By output do you mean the base elevation given on the CSV file that you export from Flow?
Yes, exactly (on #2).
Should be APC, but I’ll double check.
In your case, don’t bother with an antenna height. Your average will be the phase center of the antenna which is perfectly fine for your base condition.
4 Likes
Agree. If fact, do a few 24 hour observations a few days apart, process in OPUS and average for a good base coordinate.
4 Likes
Agreed. OPUS can accept up to 48hrs so if it’s a permanent base you could also consider maxing the out the observations to hone it depending on the accuracy needed.
AUSPOS here accepts much longer durations and doing 3 day observations does result in more precision (tighter grouping) across the results. As a comparison our authority Geoscience Australia actually does 7 days under the standard before issuing an accuracy certificate for a CORS.
If there is any variability you can also fine tune by weighting the average based on the confidence of each result.
3 Likes
@kdoherty, I agree with guys. I see 2 options for you:
- Use OPUS. In this case, as @jdouglas said, you can just set the coordinates from the OPUS and leave the antenna height field empty (both in OPUS and Emlid Flow). These guides can help you record and upload the logs to the OPUS.
- Use Averaging. In this case, I recommend you switch from Averaging to Manual once the averaging is done. Emlid Flow will automatically fill in the fields with the right coordinates. So you won’t need to do anything additionally (it’ll work properly with any value you set for the antenna height).
4 Likes
Hi @malcolm,
I tested it a while ago. And I confirm @jdouglas words. OPUS doesn’t read any information about the antenna type and antenna height from the raw data log. It’ll be considered only if you specify it manually when uploading the log.
- If you specify nothing, you get the APC position from OPUS.
- If you specify the antenna type, you get the ARP position from OPUS.
- If you specify the antenna type and antenna height, you get the coordinates of the point on the ground.
4 Likes
This extremely helpful to know what OPUS returns.
Can someone also clarify what CSRS-PPP correction returns? I suspect it also returns the coordinates of the point on the ground.
My current workflow is:
- Average the base position (setting antenna height to 2 in base settings) over an unknown position.
- Take a screen shot of 2-min averaged base position in Flow for base correction later. This is known as “Original” base position.
- Collect rover points for the remainder of the day.
- Submit base file to CSRS for PPP
- Obtain “Corrected” base position from CSRS
- Difference “Corrected” base position and “Original” base position to obtain differences in X,Y, and Z and apply the difference to the rover points to correct them too.

Because CSRS does not give you the option to enter an antenna height upon upload, my guess is it reads it from the RINEX header based on what is shown in the returned CSRS report below and returns the coordinates of the base position on the ground. Is this right?

My questions are:
- Is my current workflow correct?
- Is the screenshot of the 2 min. averaged base position in Step 2 above, the APC position of the base or the coordinates for the base on the ground?
- If it is the former, do I need to be adding the antenna height + APC position (2.134 meters) back to my corrected Base Z value before I apply the correction to my rover points?
I understand that this is a long post so please feel free to move this discussion to another thread, if needed.
Thank you!
Angie
1 Like
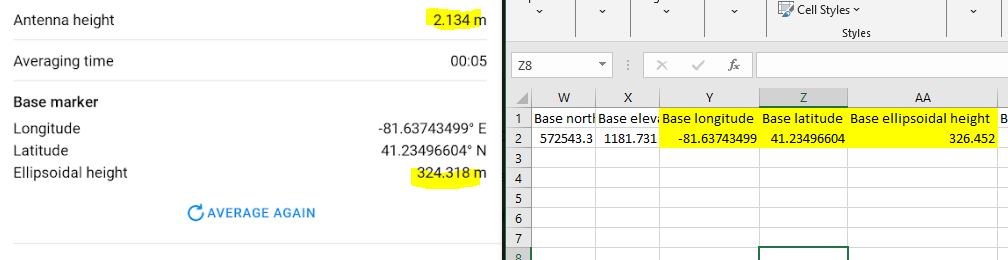
Hi Malcolm, the base elevation in the CSV that is output from Flow = Base Marker Ellipsoidal Height + Antenna height entered in Flow.
4 Likes
Hi Angie.
-
Looks good. One suggestion would be to take your average single collection for your base from your project as your first point. Name it Base, or whatever works for you. Then, when you get ready to start collecting your rover points, go to base settings, select Configure. And then select the option to use a point from a project and select your base point. That way, the base point will be saved to your project, and csv file without any screenshots or manual input needed.
-
The ground.
-
CSRS looks to be applying your antenna height, so your corrected position should also be on the ground. So, no additional antenna height needs to be added. For your differential calculations, you need to account for the rover pole’s height if it is different than the base’s pole height. If they are the same, then disregard.
4 Likes
Ooo, you’re not going to like me. That’s backwards. To determine ground position, you have to subtract Antenna height from APC position, yes? I believe the Base Marker ellipsoid height indicated is subtracting the Antenna height from the measured APC position. In the CSV, it’s showing the actual APC position. I started writing the paragraph below before I realize what was happening in your example!
While doing my testing yesterday, I foolishly didn’t document the Base marker on the Base. What I did was to take a few RTK points on the same basically flat surface that the Base was set on, one time with the Antenna height set at 2.134 and the other set at 0.134 (I don’t see any way to remove the ARP to APC measurement). The ARP for the Rover in the two surveys was set to 2.00. The base was rebooted after changing the Antenna height setting, before the second survey. In both cases, the difference between the Rover’s ellipsoid height measurements and the Base ellipsoidal height in the CSV was approximately 2.134m, meaning that the Base ellipsoidal height in the CSV was always measured from APC, regardless of the Antenna height in the Base configuration.
Base antenna height set to 2.134:

Note that column O is antenna height for the Rover. Now here is the same with Base antenna height set to 0.134:

Keep in mind that the surface wasn’t perfectly flat. If you would like, I can do it again later today, but this time get screen shots of the Base marker in Flow as well. Thanks for all your help sorting this out!
1 Like
Never mind, we’re saying the same thing, I think. Yes? CSV = APC position, yes?
I still like you just fine. Yep, I think we are saying the same thing, though I didn’t put it very well.
2 Likes
Thanks everyone for contributing. Good to have this cleared up!
I should have stated that I don’t actually care about the marker height for the base, as I’m simply using it for PPK for a UAS LiDAR system and for RTK for ground control points. The base is not set up on a useful position to use in the survey, i.e. either in tall grass or on top of a wooden platform. So, primarily trying to understand what the Base ellipsoidal height in the Survey represents. Again, thanks very much for your help! I think I have a much better understanding now.
1 Like
You don’t need to set a rod height for a permanent mount point.
Just enter “0” for the antenna height (bottom of receiver)
The computed point is the bottom of the receiver
2 Likes
Hi Angie,
Yes, I see in the report you shared that the antenna type and height are specified. The coordinates should be the coordinates of the point on the ground.
CSRS-PPP service indeed reads this info from the RINEX file:
- If you have antenna height and type specified in the log, you get position on the ground.
- If you have only the antenna type specified, you get the coordinates of ARP.
- If neither the antenna type nor height are specified, you get the APC position.
Yep. But make sure you subtract the coordinates in the same datum when calculating the shift.
Agree with Dave on this; it’s the height of the point on the ground.
Also agree with Dave; you don’t need to make any additional changes here.
1 Like