This surely should be answered 100 time over and easy to find, but I cannt for the life of me find a clear set of guidance to help. So I guess to start with… sorry… this is basic stuff
We usually use an RS2 as a base and M+ as a rover on a UAV for logging precise shutter position etc. Usually we survey in a known base point using NTRIP and then log rinex on the base for post processing rover trajectory and camera events. - this has worked sucessfully hundreads of times.
On a job this week we arrive on site and there is no mobile signal to allow connection to NTRIP and thus we cant survey in base points (and GCP locations aswell).
So we set up the rs2 and logged rinex throughout the flight.
We then also logged rinex on the RS2 as we walked around surveying each GCP point (observed for 3 min each) .
My question is workflow for calculating the base position and also GCP positions…
I can download rinex from a local base, but I cant get my head around the postprocessing workflow to accurately calculate the base and GCP locations.
Please could someone point me in the correct direction for this?
No worries at all, I went through the same steps when I joined this forum and purchased Emlid equipment. They survey quite differently overseas than how we do here in The States, but I think I just about have it to where I can get the data I need keeping the majority of there workflow. Vertical is the worst transition. This would be another good resource if you are doing survey points.
The method that I use is to make separate logs for each GCP. It seems cumbersome, but when it comes to post-processing it is much faster than you would think. Basically you just occupy the point, go into logging, turn on the UBX and let it run for the desired amount of time and then turn it off. Rinse and repeat and you end up with each point ready to process against the base individually. You can use the timestamp from the GCP point to isolate the timeframe you need to process the base. Just keep track of what GCP is which log. Of course you will see that when process as well.
I want to try the point extractor as I have seen great comments, but just don’t have the time to do so right now.
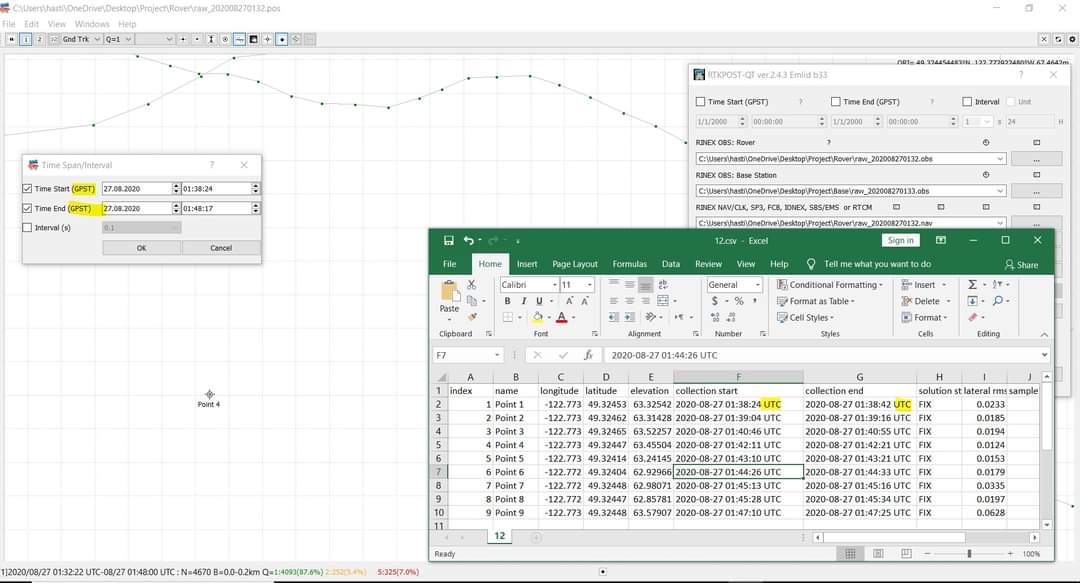
In PPK mode, positions of the rover are logged as one continuous array. To get GCPs after post-processing in RTKLIB, you should find the means of each point’s position value. To do it correctly, you need to know the precise time when you stood at each location. You can set the start and stop time for your points in RTKPlot in Edit → Timespan.
You may also try Michael’s workflow and create a separate log for each point.
Second thing the csv files shown as UTC time but on the plot is GPST ? You can change it in the option but still it is shown in GPST command. How can I do that ? And still it shows some points. How can I know exact ? Should I use the end or start ?