This is difference between fix&hold and continuous. Not going to tell you when to use either, thats up to you.
I used 2x RS+
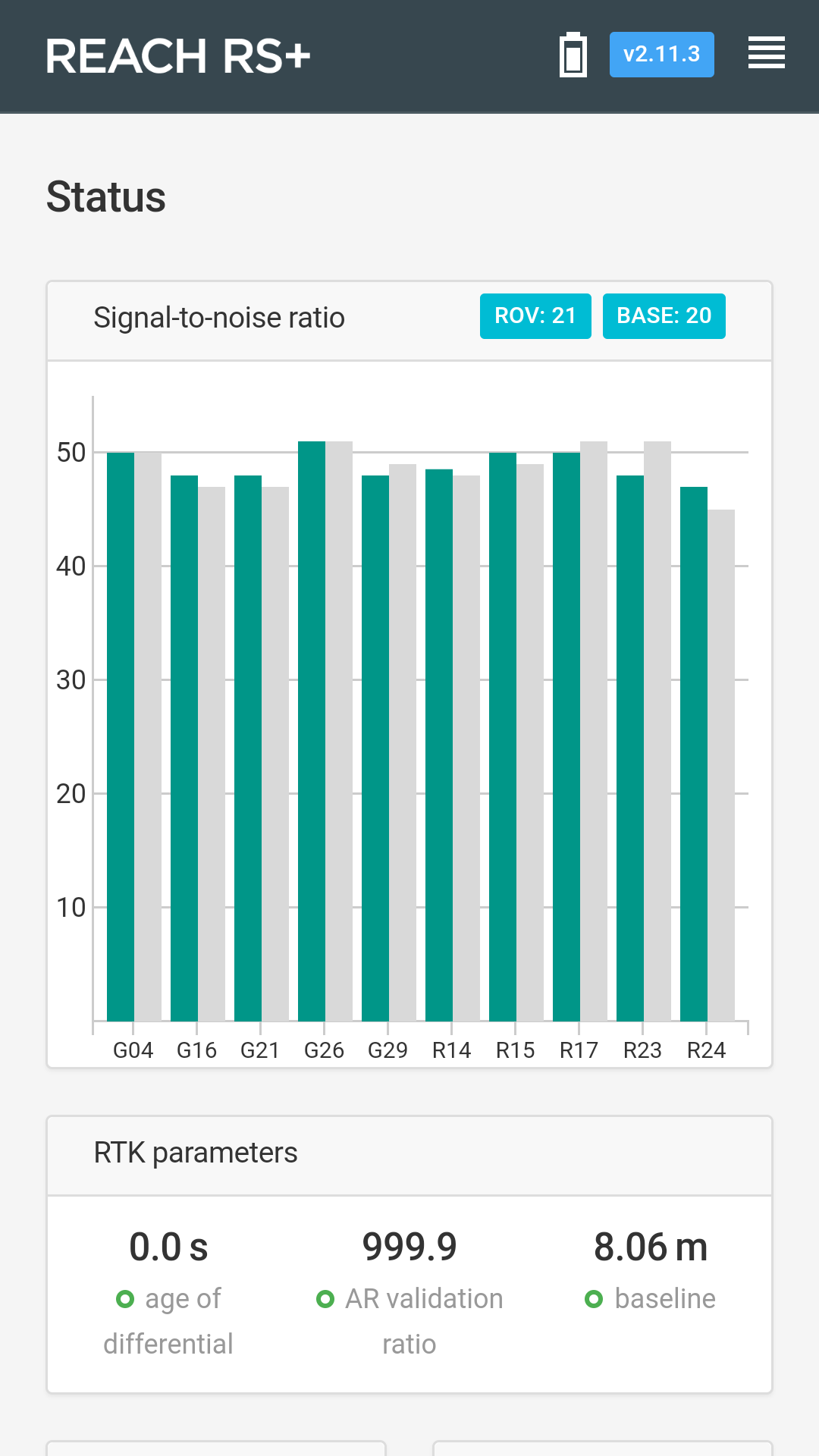
Reachview 2.11.3
base over known point with GPS/GLONAS @5hz on both rover and base.
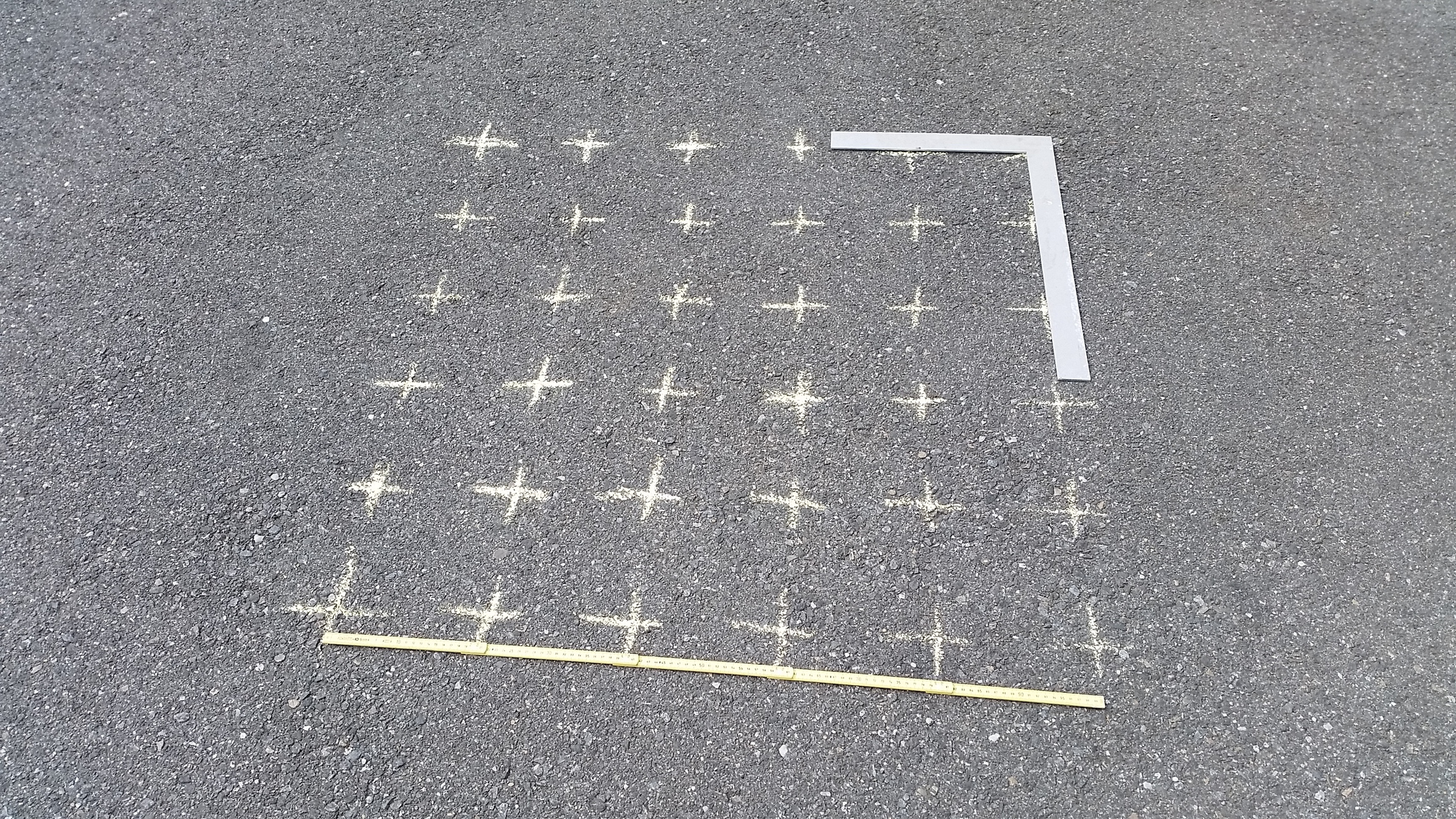
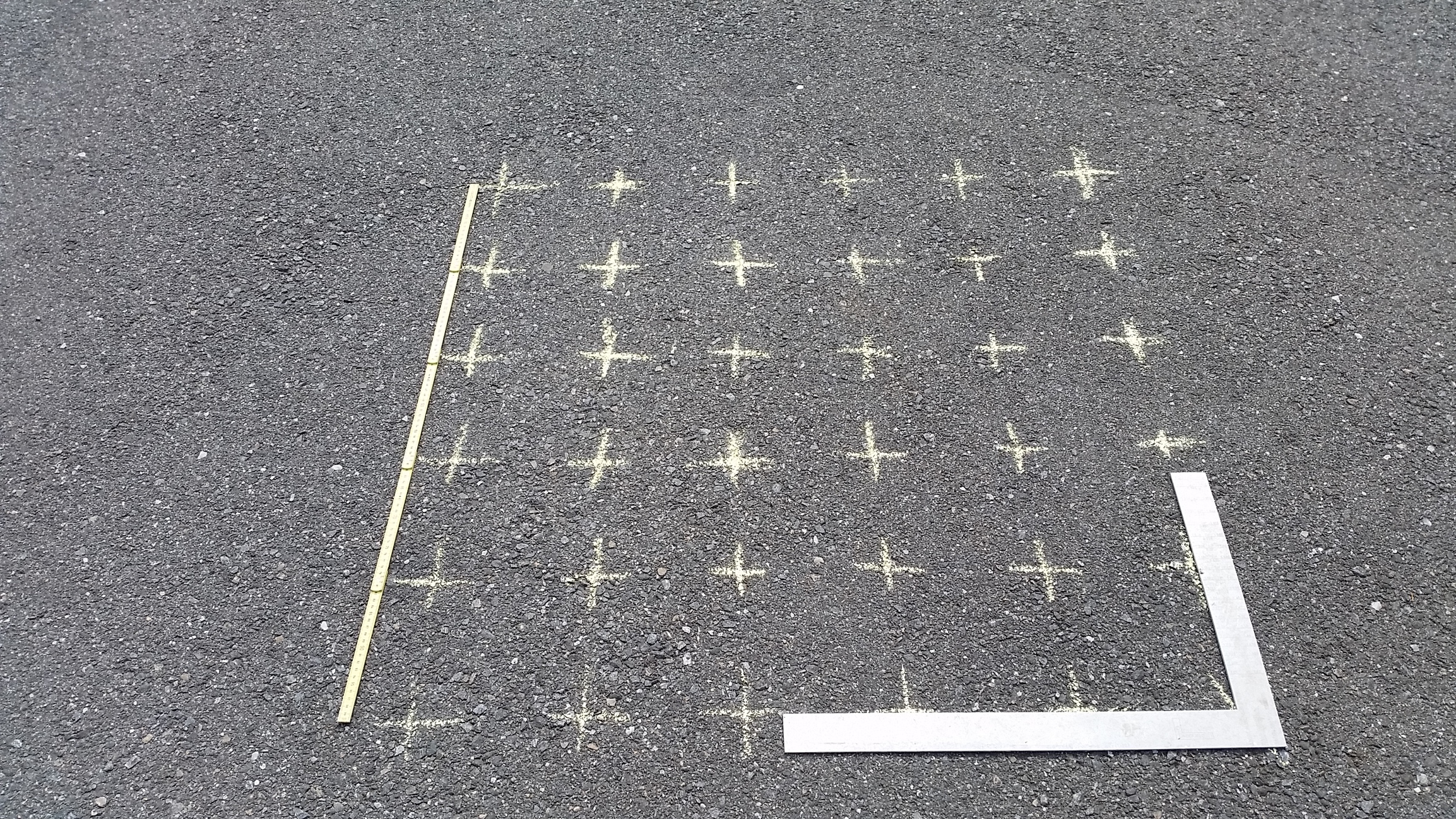
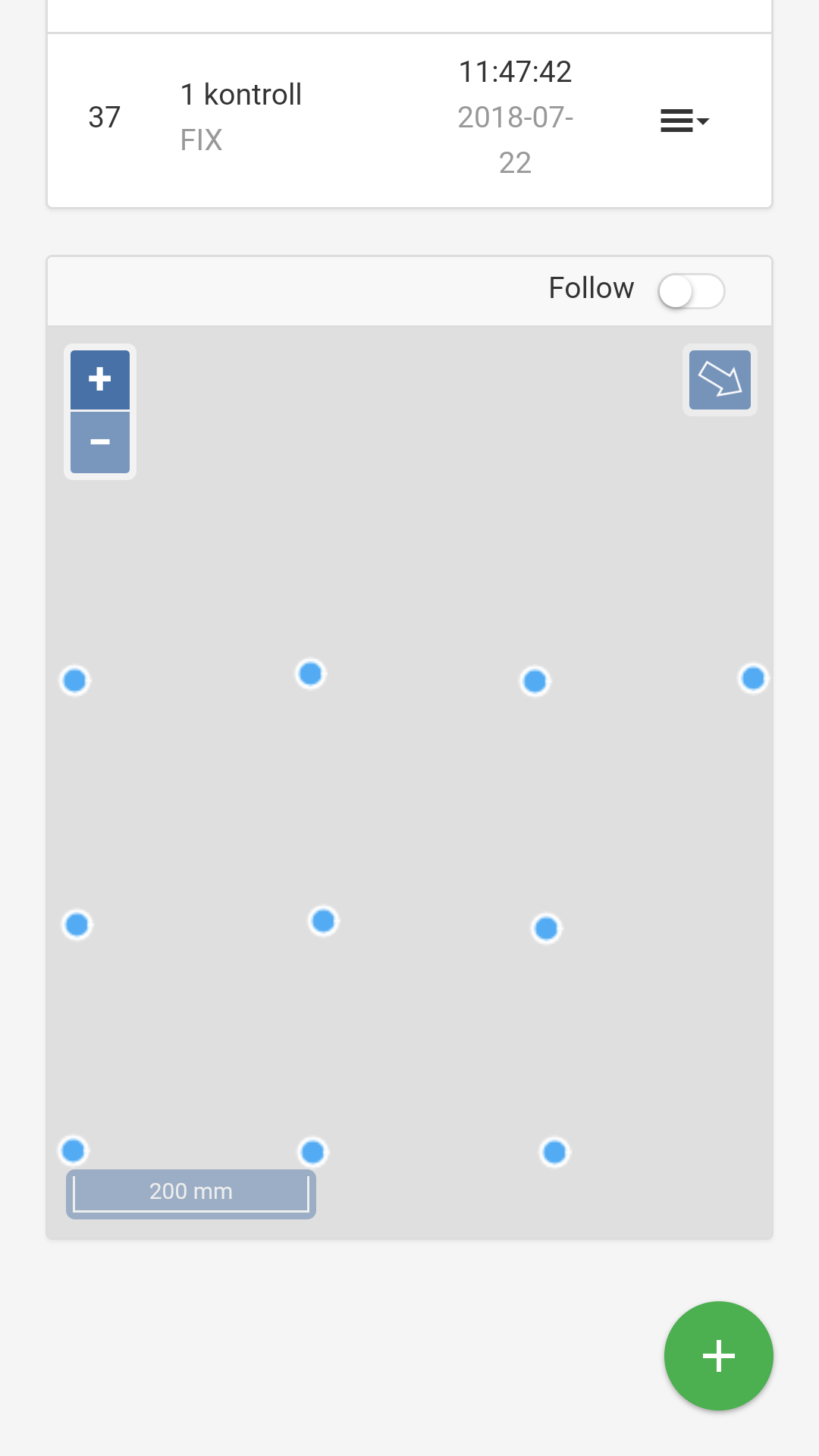
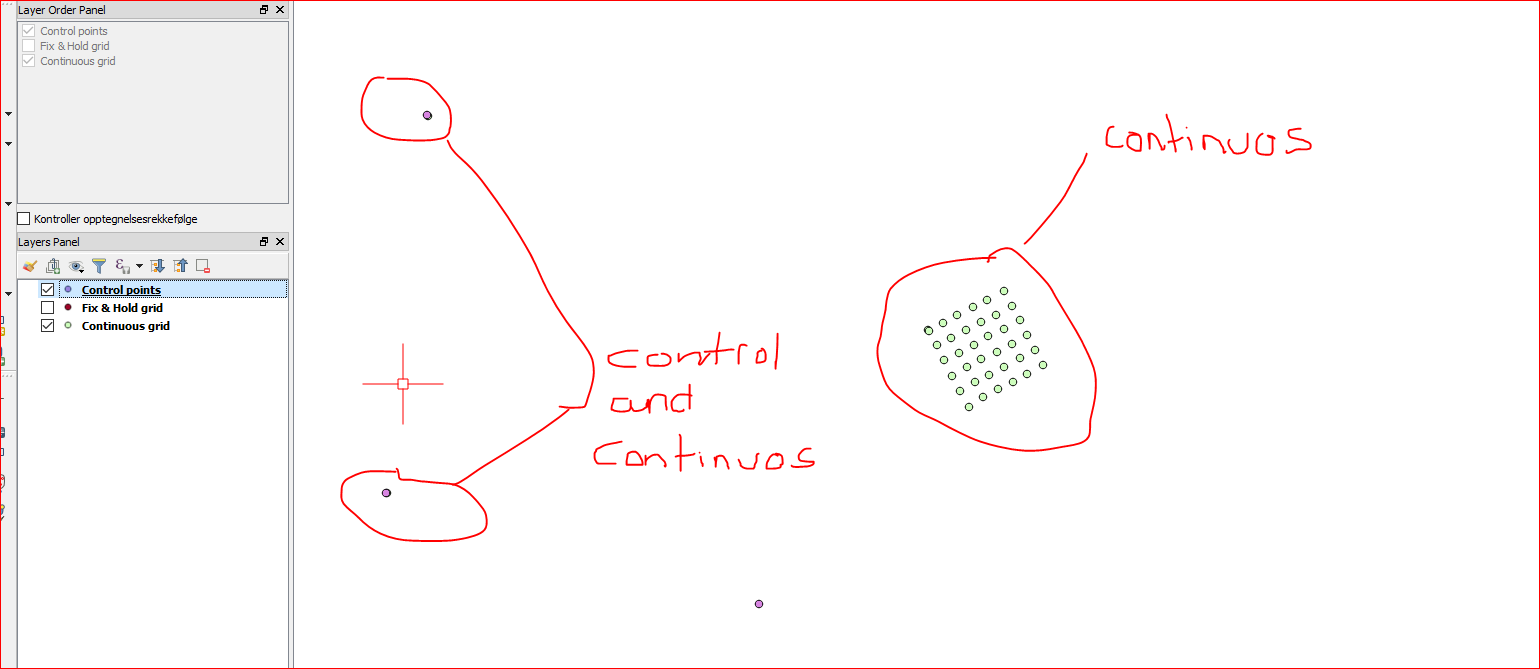
Made a grid on the tarmarc, 1x1m with 20cm spacing. Started out at point A1 and went A1,A2,A3 etc then back again with B1, B2 etc.
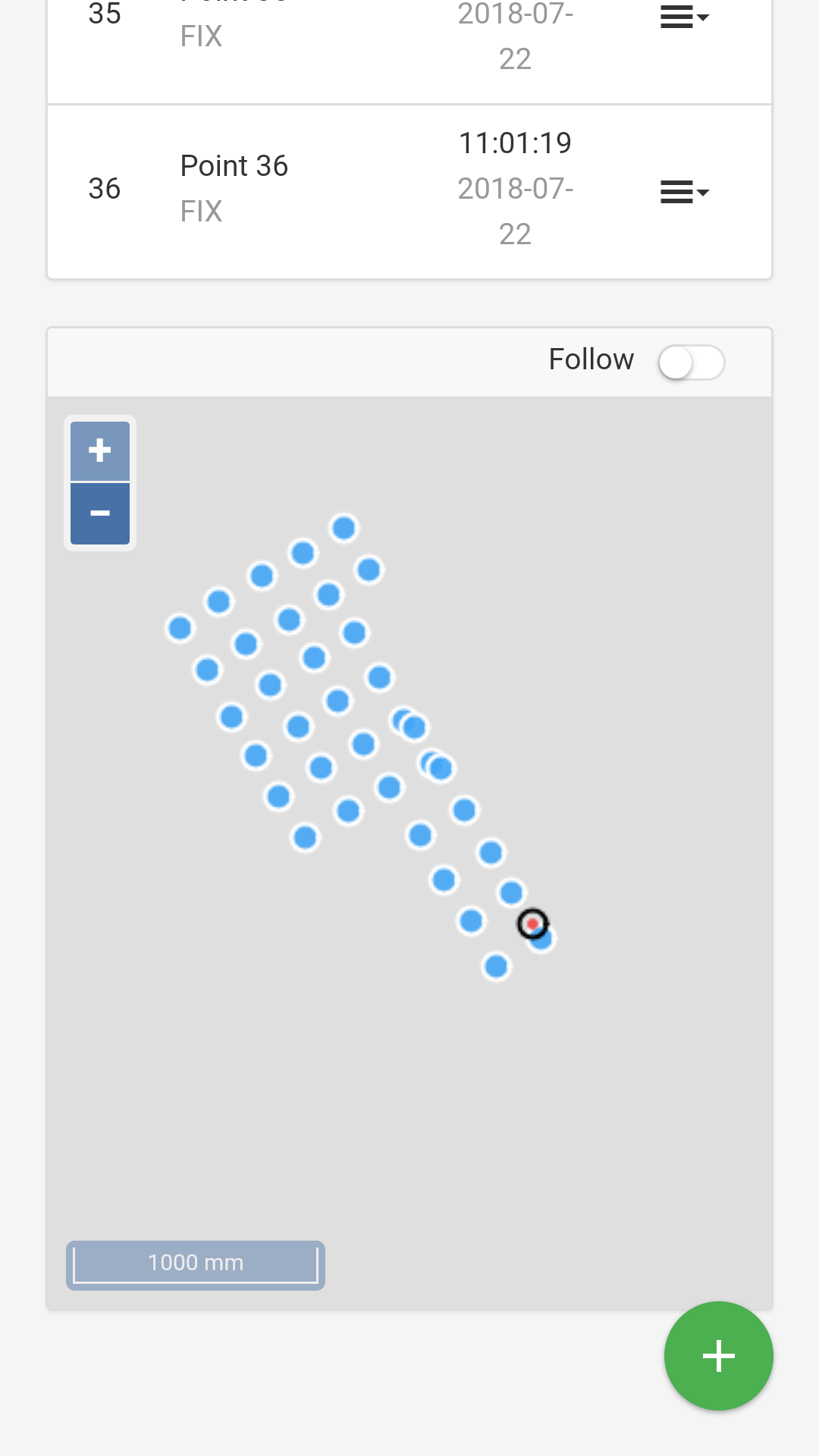
Collected all points in survey mode, download CSV and imported this to Qgis for compare.
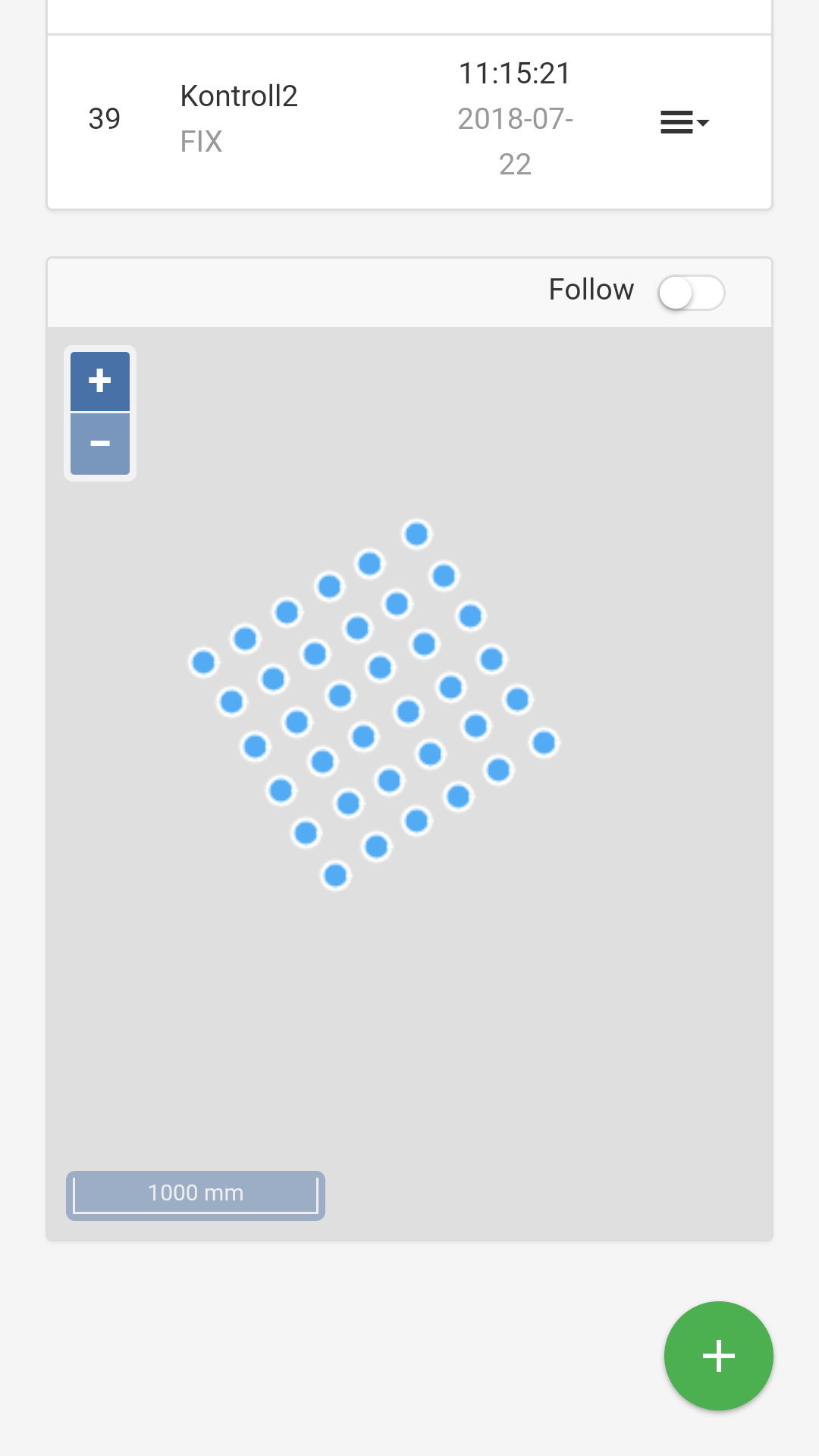
I noticed fix had shifted location but i continued the grid path to see how the final product would turn out.
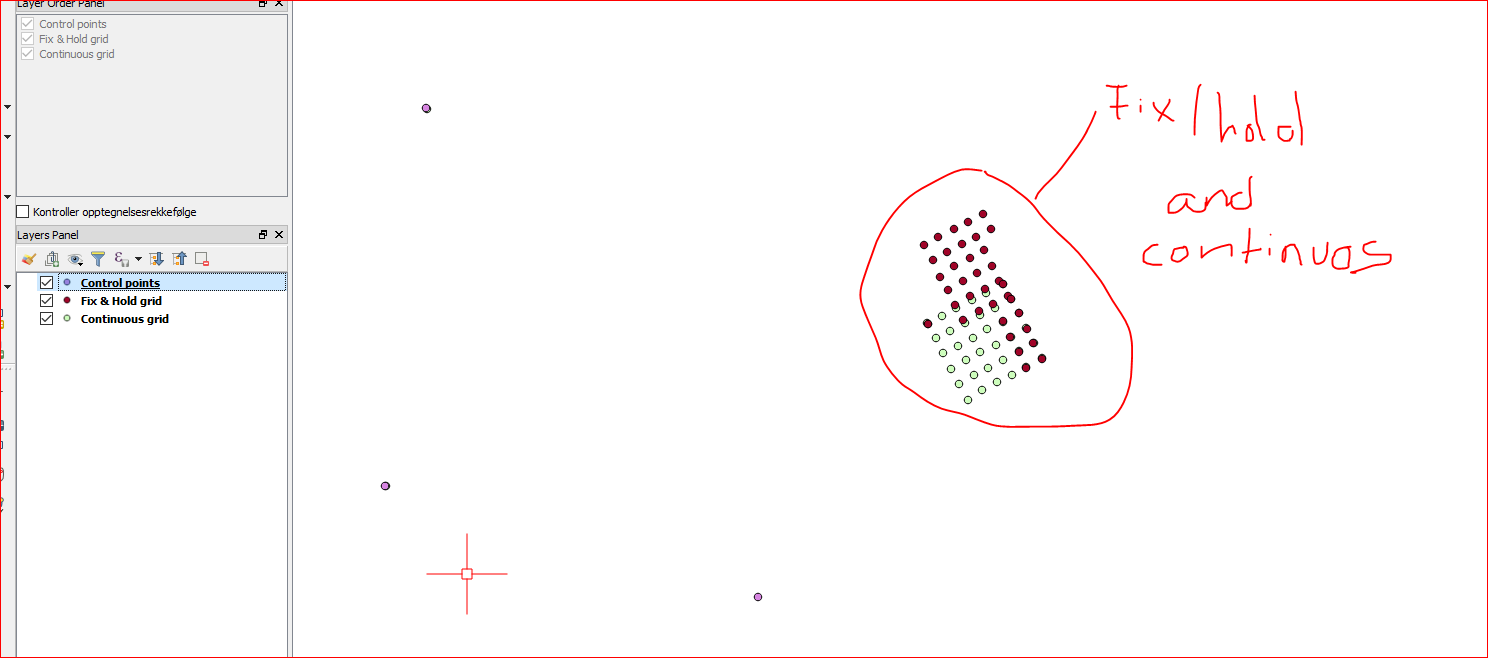
As you can see from the picture above, plots are all over the placed but is tied to first and second run so you can see the pattern in both.
Now, which one is the right one?? This is the problem/danger with Fix&hold, it can trow you of by showing you AR 999 and make you think this is solid fix, but NOT.
If you where out on a job to record points, you would redo all your points. For good measure a second and third survey would rule out bad fix if done with some time appart.
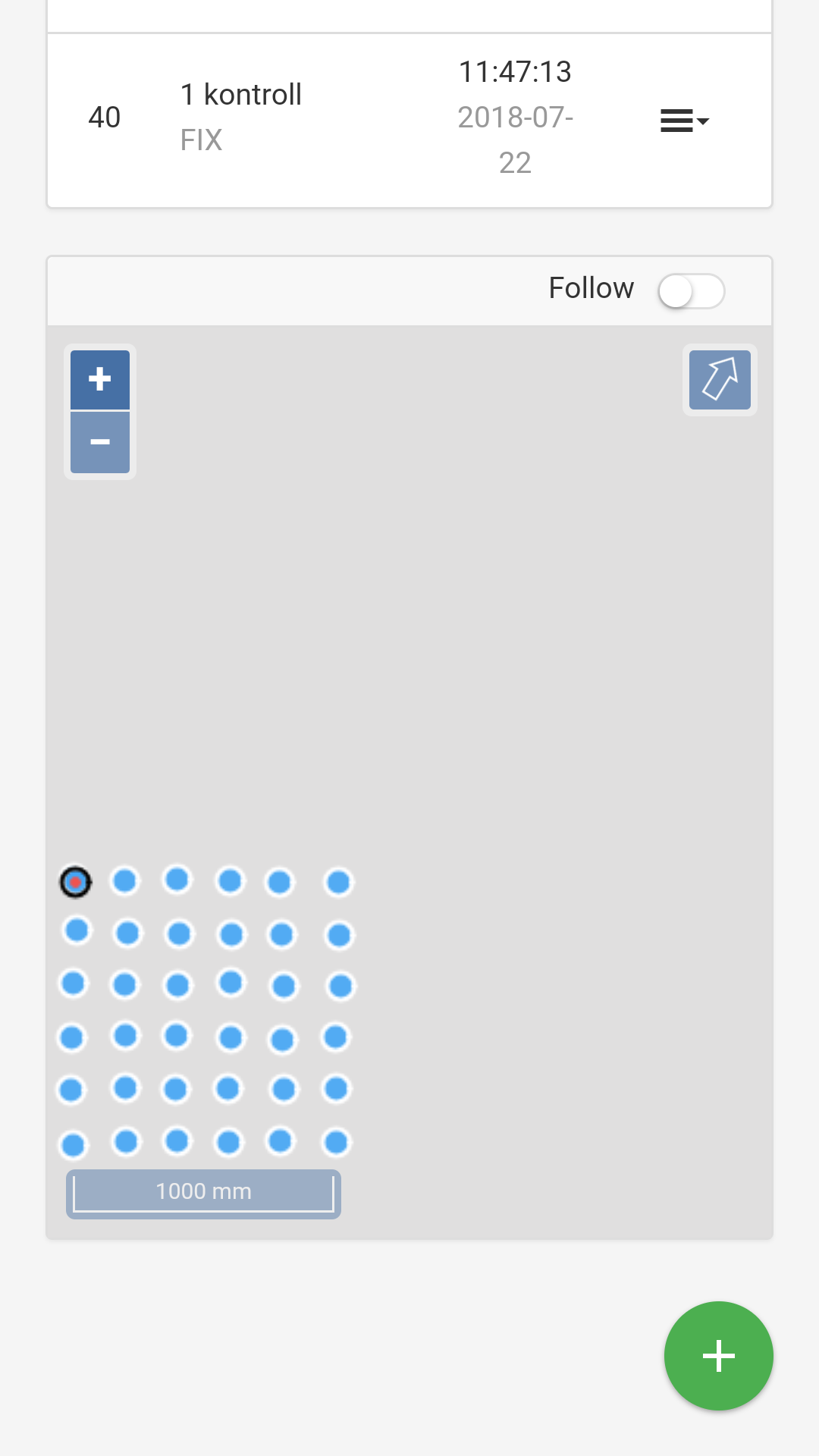
Next up is Continuous and i set angle mask to 20. I bit lower AR, but stable fix for the entire run. I also surveyed over 3 known points for good measure. Now i know this is the right location with right coordinates for the grid
I think my point is, its important to know the difference. Each mode has its application, like fix&hold is good for moving device and continuous for critical measure.
Hi.
Great job, for us novices it is difficult to learn by reading, it is better explained with “apples”.
A silly question, “fix & hold” to trace a route? and continue for specific points ?. Glonass AR was on ?.
From What I understand from your posts is that fix and hold is not to be trusted, when the delta/movement between 2 points is low (submeter)?
Is that to be said?
E.g multipath has alot to do with it. In my situation above there is buildings and trees around and I know this kind of problem is to be expected. Specially below 15 degree.
If I were to fly a plane or copter, fix and hold would do much better as there is no such thing as building and trees up in the sky.
This kind of shift could happen with continuous too but would not hold to the bad fix nearly as long as fix & hold.
Fix & hold live up to its name. If fix, it will hold.
So distance between point is not the case no. It’s just better to illustrate the consequence if one ignore the difference without a propper routine for working with critical coordinates.
I wonder if you can assist me with this a bit more…
I use Emlid Reach for my application in real-time. I have my base set up and I send corrections via TCP and the mobile phone network at the Base and the Rover.
My rover is used in real-time, for the results to be sent to another application that is used to guide the user to another location from where they are currently. normally this is about 6m away.
I have my rover set in Fix and Hold and have experienced this sort of behavior and have been dealing with this.
My question to you is, do you think me changing to Continuous mode on my Rover will produce the same sort of results that you have demonstrated?
Say you are riding down a trail with Reach mounted on your helmet. Your job is to make a trail map. The beginning of the trail is very clear with good satellite view. A little further along, you ride beside some large trees before coming back into the clear. In continuous mode you might jump back into float mode while under the tree canopy if the signal becomes poor. In fix and hold mode, you’ll probably stay fixed the whole time and the accuracy might stay really good until you come back into the clear.
Now if you were walking along and surveying points every 10 meters along the same trail and were in continuous mode, then when under the trees at a point you might see on your screen a few fix points scattering randomly around and some float wandering and finally a good group of fix points making a prominent defined spot within a cloud of float and false fixes. If you were in fix and hold mode, you would probably see fixes the whole time. They could be all in one spot, or more likely scattered globs with no defined center.
You can see that if you are moving and recording a track, then fix and hold might be better. Also you can see that if you are surveying static points, then continuous might be better.
Also, if you wanted to survey a stationary point in an obstructed area, you may elect to use fix and hold. This is because you can start with a good fix in a clear area and walk in to your point in the obstructed area while holding the fix and have time to collect the point. If you did this in continuous mode, you would probably be dropped back to float status.
These are not in-depth explanations which cover all considerations, but just an overview to illustrate some uses for each mode. Something to consider also is that the act of collecting a point more than once and seeing that you get the same result each time will give you confidence that you had a good fix.
Very important point there about the correct mode to use for what application. Its also always a good idea to increase the elevation mask for critical points. Few satellites will be available but at least they will have a good clean SNR. However, in my findings, having a very high elevation mask tends to affect the heights a lot as there is less data to work with for vertical intersections. So, there is a balance. Hence post processing is so critical and RTK should only really be used for rough work as needed.
Is this something that makes the new PLUS models better than the former non-plus model?
Besides it having more memory and new processor over the EDISON? I was thinking their wasn’t much difference before…but sounds like performance benefits also? That would be an important benefit.
I almost ran on my roof checking my cabling as even on my base station with an external Tallysman antenna and 6m of heavy duty cable, I rarely go beyond 6sat with 50 as SNR
I am just joking. I get same result with an old RS too. Also one of my tinfoil DIY performs almost the same. It’s just really a clean area with no or little interference.