



Ahhh, I found it. Mine is the Emlid “b33” with no subversion.
I’m going to try again and if I still get bad results I will place a link to my converted files and perhaps you can try them and we can identify if the problem is in my conversion settings or my post processing settings. It will probably be late this afternoon as I have some other work I need to take care of.
Thanks to both of you for your help.
2 Likes
Link to Conversions: https://drive.google.com/drive/folders/1hkICsTG_Htc06eQPIO-0Z_JIOwIvFYD1?usp=sharing
I re downloaded the software and raw logs and did the conversions again with the new software/logs. One thing that I see different is that this time i got .SBS files in the output folder. This was not the case before.
When doing the conversion does it matter if you use the Rover or Base .nav file? The directions say it doesn’t, but I wanted to double check. If anyone has the time and inclination to try these converted files to see if they are valid I would appreciate it.
Thanks,
Frank
OK, so I’m stuck. Where do you suggest I look for more information?
Thanks
Christian,
I’m completely stuck. Would it be possible for you to share your convertor with all its setttings so that I might be able to discover where my problem lies?
Thanks,
Frank
Will do later!
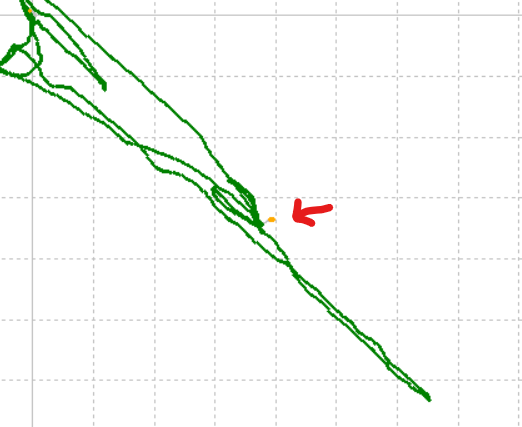
I tried the converted logs in Emlid b33 and go 60+% no solution (0). I found a download of developer b33c, but it was named “ver.demo5 b33c” so I am not sure if it is the same one that @wizprod used, but I got a 99.5% fixed (1) solution.
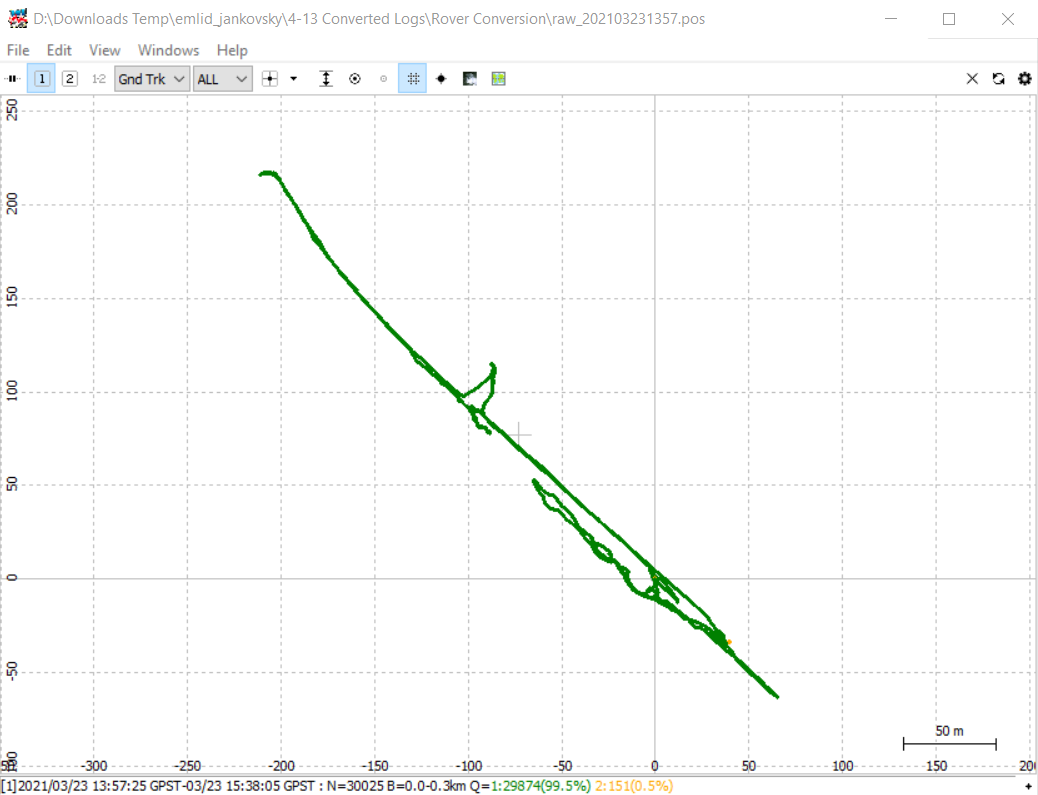
The only place I got a float was here and I am guessing this was the beginning?
I also attempted to rerun the original UBX files and b33c gave me “file format not recognized”.
So if I understand correctly the software you usually use did not process my conversion correctly but an older demo version did. Does that make you think something is incorrect in my conversion?
This puts me at a lost because I am not versed enough to understand why different version with the same settings produce different results. As you might remember from earlier my Emlid b33 RTKPOST had more trouble at the beginning acquiring a fix whereas the RTKExplorer version clicked almost immediately. The RTKPLOT Sat Vis isn’t even the same.
Original OBS Base via RTKExplorer ver.demo5 b33c
Original OBS Base via Emlid b33
Jankovsky Convert OBS Base via RTKExplorer ver.demo5 b33c
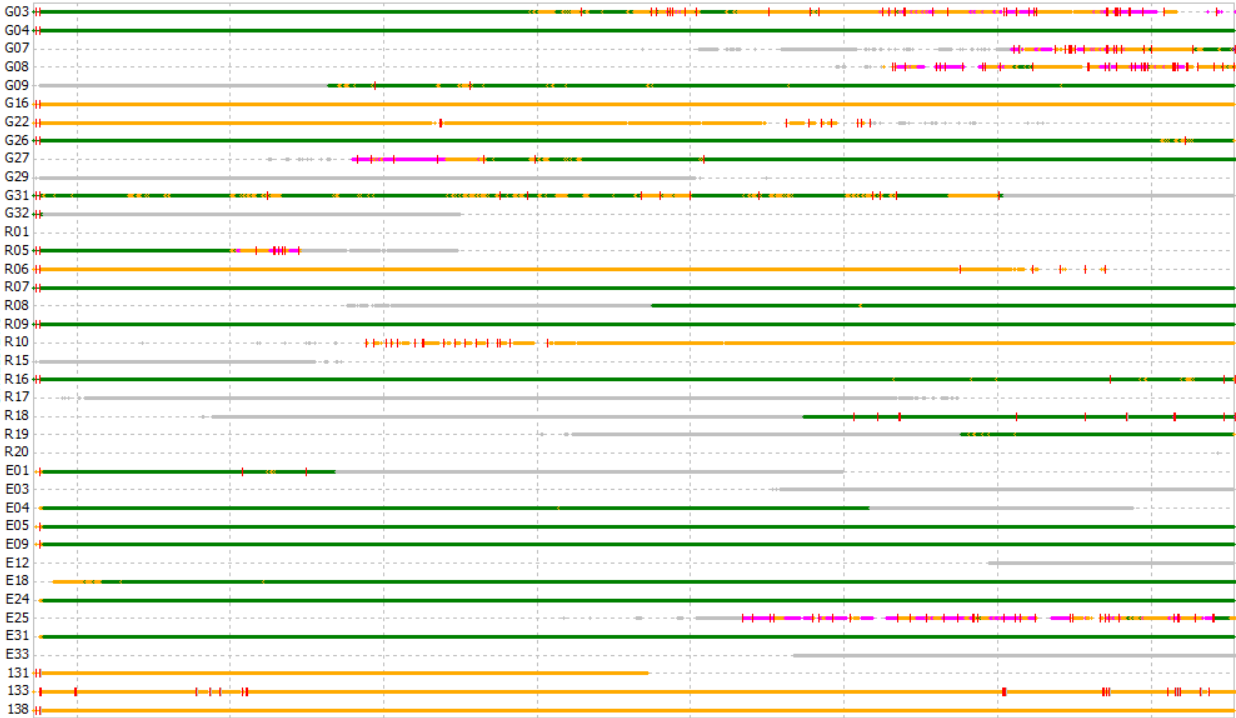
Jankovsky Convert OBS Base via Emlid b33c
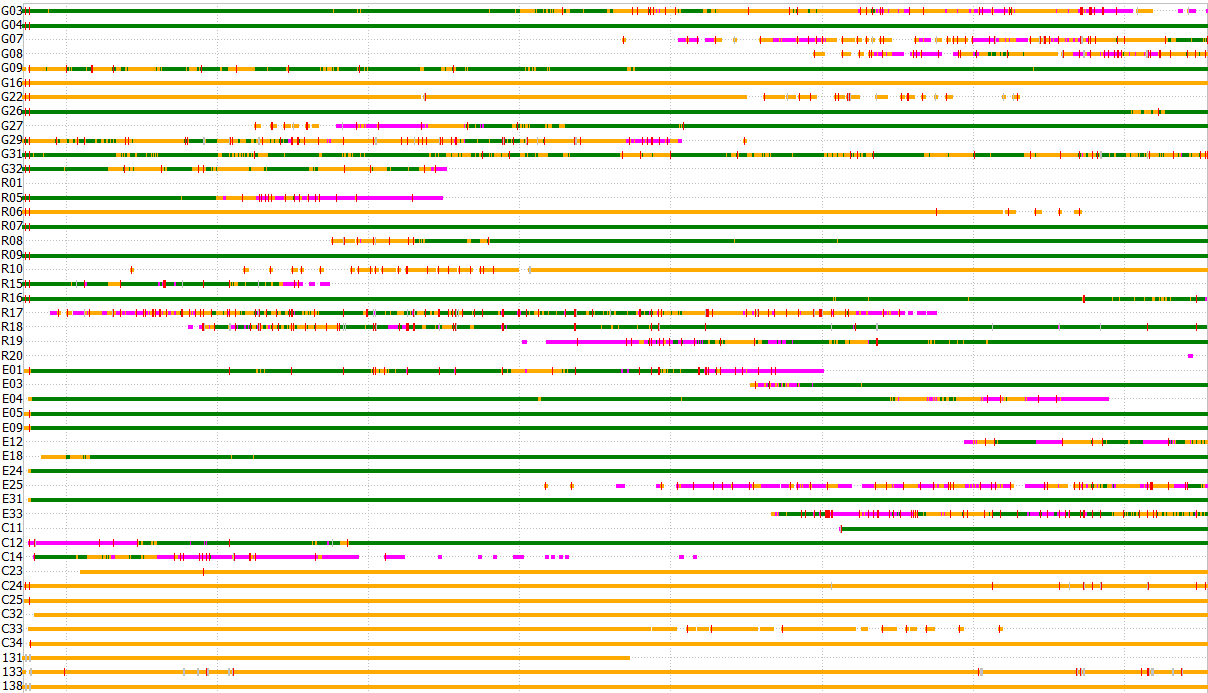
You can see that you file has Beidou and SBAS whereas I only used GPS/GLO/Gal so that is probably the difference in the POS outputs. I would do the Rover converts, but I think you get the idea.
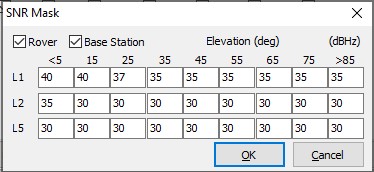
One more thing I will note is that RTKExplorer b33c doesn’t appear to have any SnR values set?
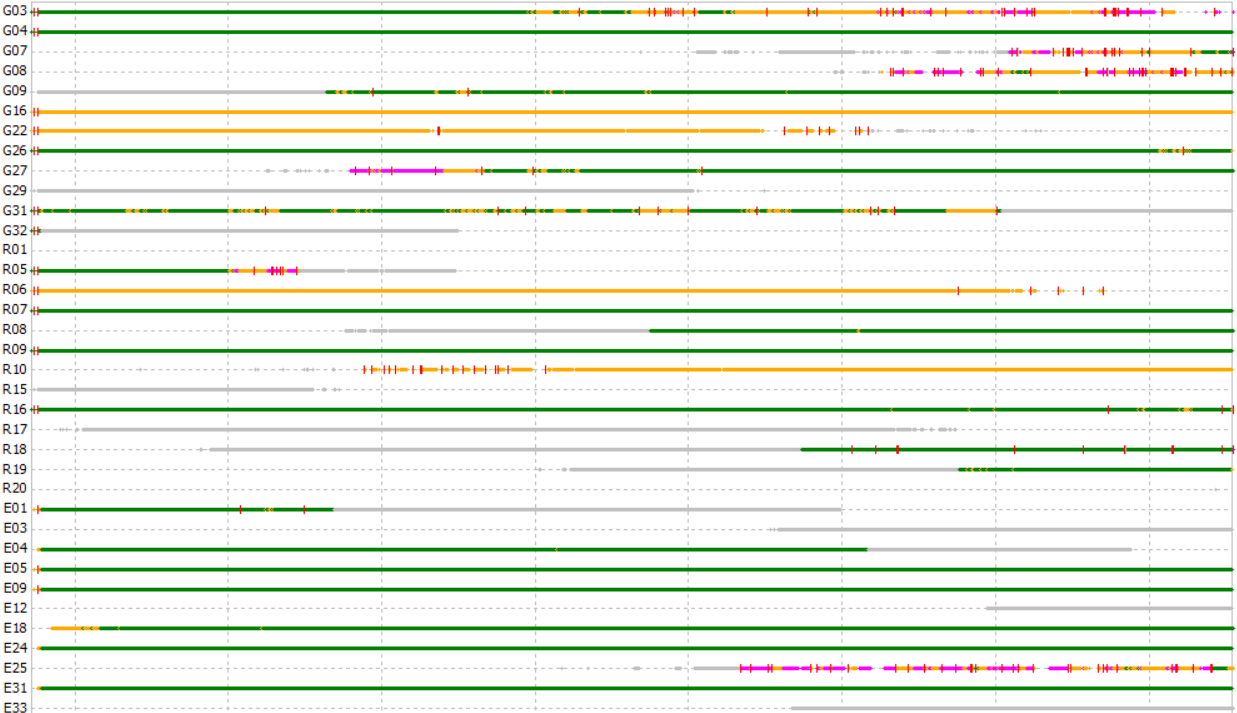
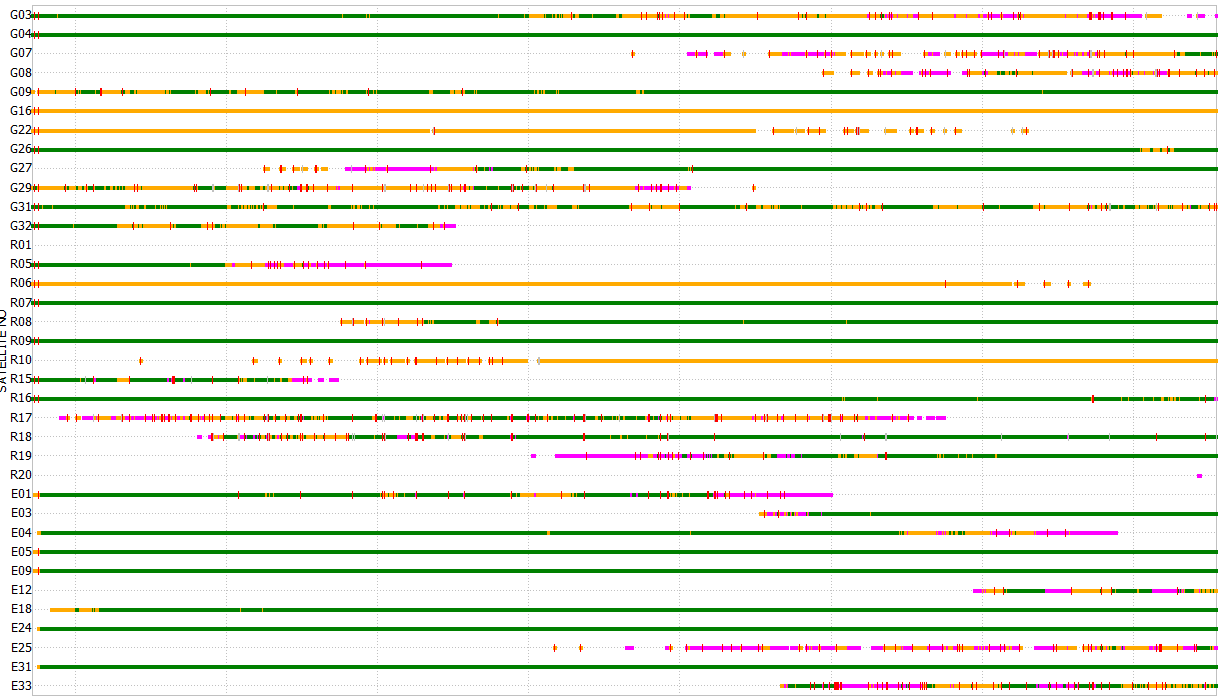
Unfortunately I have no idea what the graphs/charts above are supposed to be telling me. I don’t understand much of the under the hood part of the whole process of using the GNSS system, but I am slowly learning more. I’m starting to think that I need to document every step that I do in the conversion and then the Post Processing so that those more knowledgeable than me might be able to see my error.
Once again I appreciate the time you’re spending trying to help me get up to speed.
2 Likes
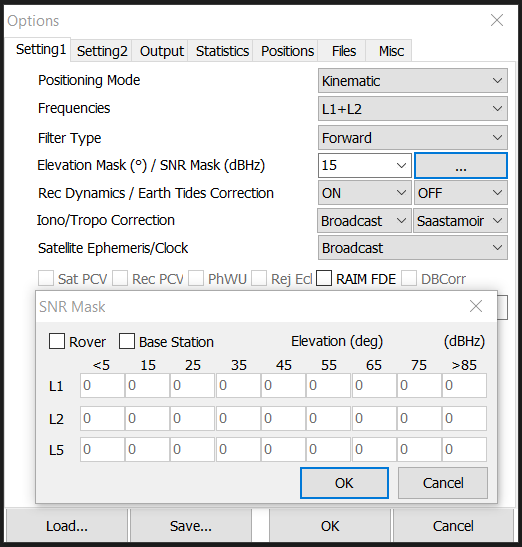
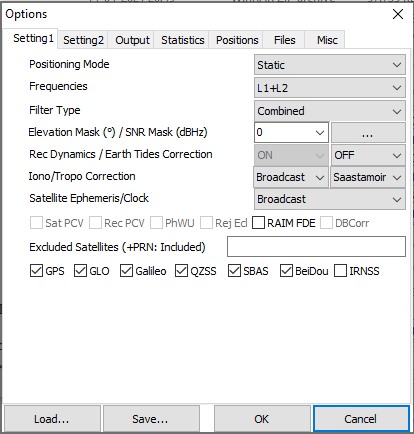
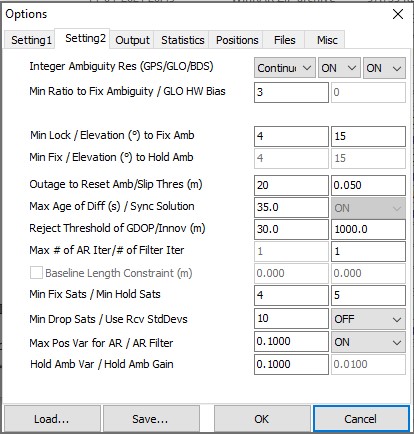
Here are my settings:
1 Like
Those are the same as mine except for cutting QZ/SB/BD.
1 Like
Those graphs are showing you the acceptable signal for each satellite individually. As a whole you can see specifically that GLONASS ® had trouble at the start and GPS (G) had issues towards the end.
1 Like
Thank you, I will try this later today when I get free.
1 Like
I guess I need to bone up on the various satellite systems.
Thanks.
You can see that in the field as well, but it’s only useful for RTK. With PPK you can record everything and then choose which constellations you want. If you don’t get a 99%+ fix then check the satellites out and cut the weakest.
2 Likes
Hi guys,
Thank you for the discussion! It seems this is the time for me to chime in.
I’ve post-processed the logs in our version of RTKLib and couldn’t get a Fix. That’s weird. So, I’ll check it additionally. There should be an explanation.
In the meantime, Frank, I just wanted to suggest you check our Analyzing PPK solution and logs guide. It might help you in understanding RTKLib charts.
2 Likes
I was out yesterday gathering points and I’m going to start over with a new set of logs and see if I have any better luck.
2 Likes
Christian,
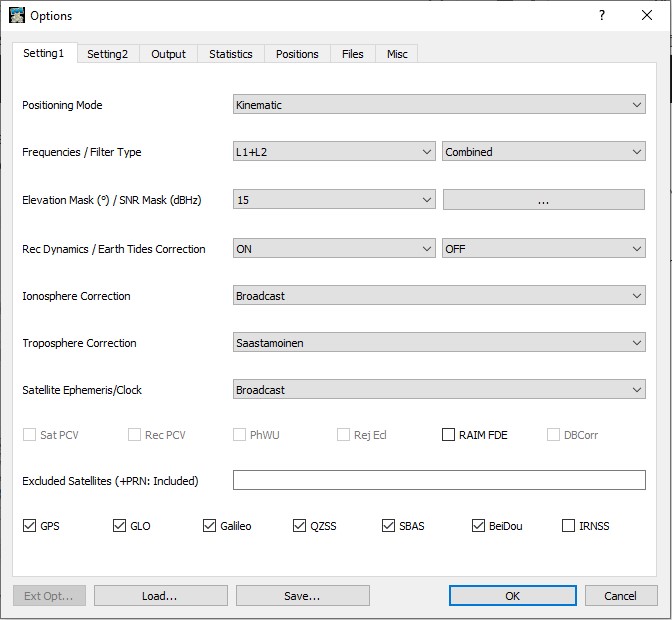
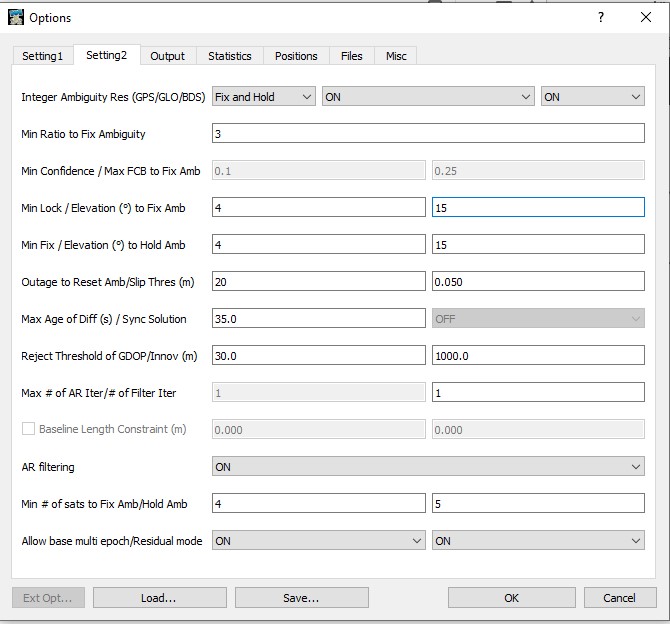
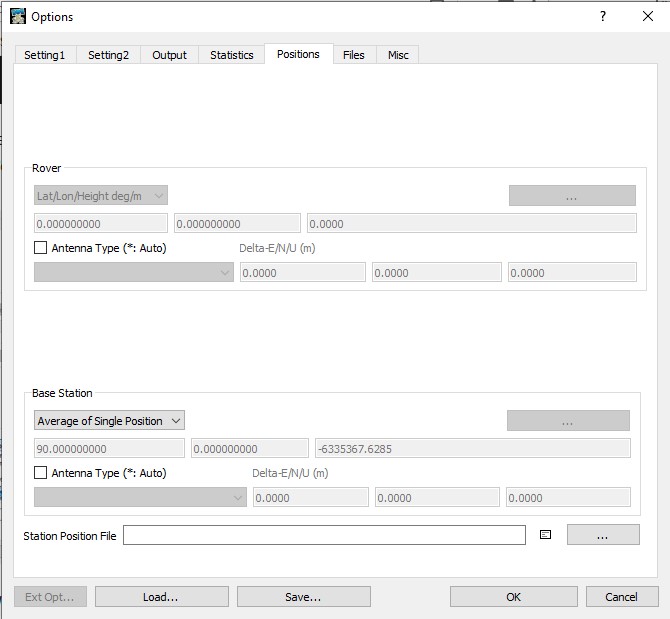
I copied your settings and ran the PP routine and all the points ended up on top of each other. I then went back to the tutorial and changed the Positioning Mode from Fixed to Kinematic since my Rover was moving. I have finally produced output that looks like it’s supposed to and in the proper location. I’m attaching screenshots of what my settings were.

Post Processing Time and Location Stats.zip (384.6 KB)
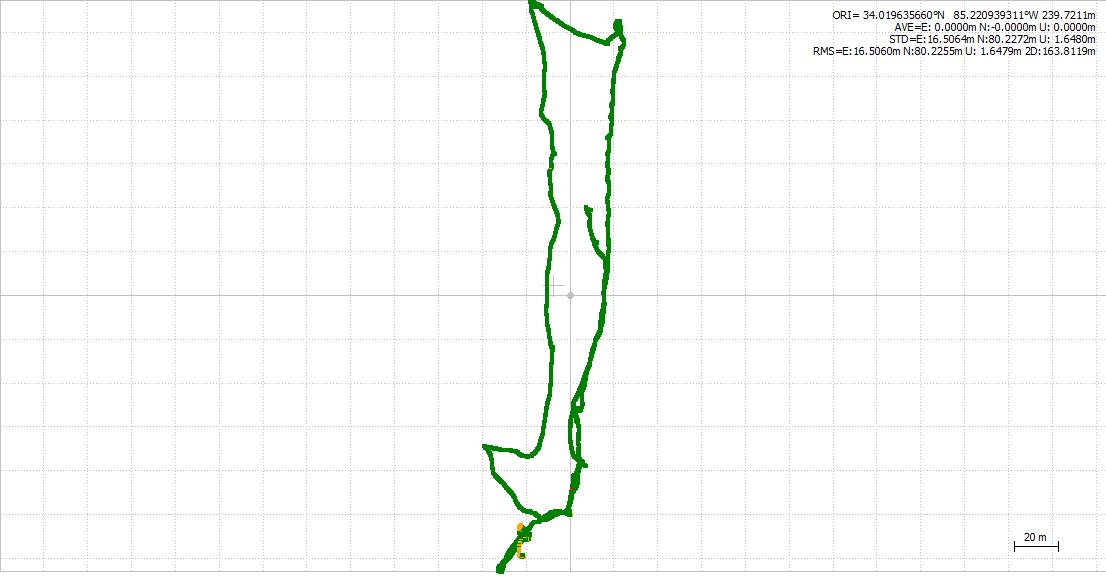
I’ve also uploaded a text file showing the PP output. If you have a minute to look at the data and provide your feedback that would be great. Same goes for Michael if he’s around. My next question has to do with the elevation values but I’m wondering if that should be a new topic as it has more to do with understanding how the different datum? (Don’t know it that’s the correct word) work.
Thanks to both of you for your time and effort.