I have a project coming up that it looks like I will have to use post processing to determine the true location of my RS2 Base Unit.
The project will involve locating underground utilities that have recently been installed for creation of as built drawings. While accuracy is important I am not a surveyor and if the information is accurate within a few inches it will be just fine.
I’ve looked at the documentation and I tired to convert some logs last year and quite honestly I was not able to follow the process. I have a couple of basic questions.
Firstly, does my Base Unit need to gather location readings for four hours before I can start to gather points with my Rover or can I let it go 10 minutes like I ordinarily do and then start gathering points? I will be gathering points for an entire day so the base will be on for more than four hours.
Secondly, does anyone have any hints or directions that might help me better understand the whole post processing process.
Maybe this will help. Let me know if you have any issues specifically and we can address them.
If all you need is relativity between objects on the site then the 10 minute average is fine and you don’t need an absolute global coordinate. If you do then you can use a PPP service or find a source of logs for a CORS station to PPK against. These are sometimes posted on a website. You might also research if you have that CORS service if it is free to access and you could then use your receiver to set an RTK point.
Since the as builts will be used by others in the future I will need accurate positioning. Generally I have some known points that I can use to adjust my points with, unfortunately there are none at this site.
I watched the video and thank you for the information. Still seems pretty involved but I should be able to figure it out. A question about the software, does it compare the log files with something online when it does the conversion? Also I didn’t get from the video how I will be able to determine the exact location of my base unit. Perhaps it shows up in the GPX or KML export?
Finally had some time to work on this. I followed the EMLID guide and your video and processed my project and I have a few questions as well as problems. My first question is why I have two different log files for my rover that are about 17 minutes apart.
After that I ran the process two times and got completely different results when I sent the output to a KML. Neither of which show the correct path that I took while in survey mode.
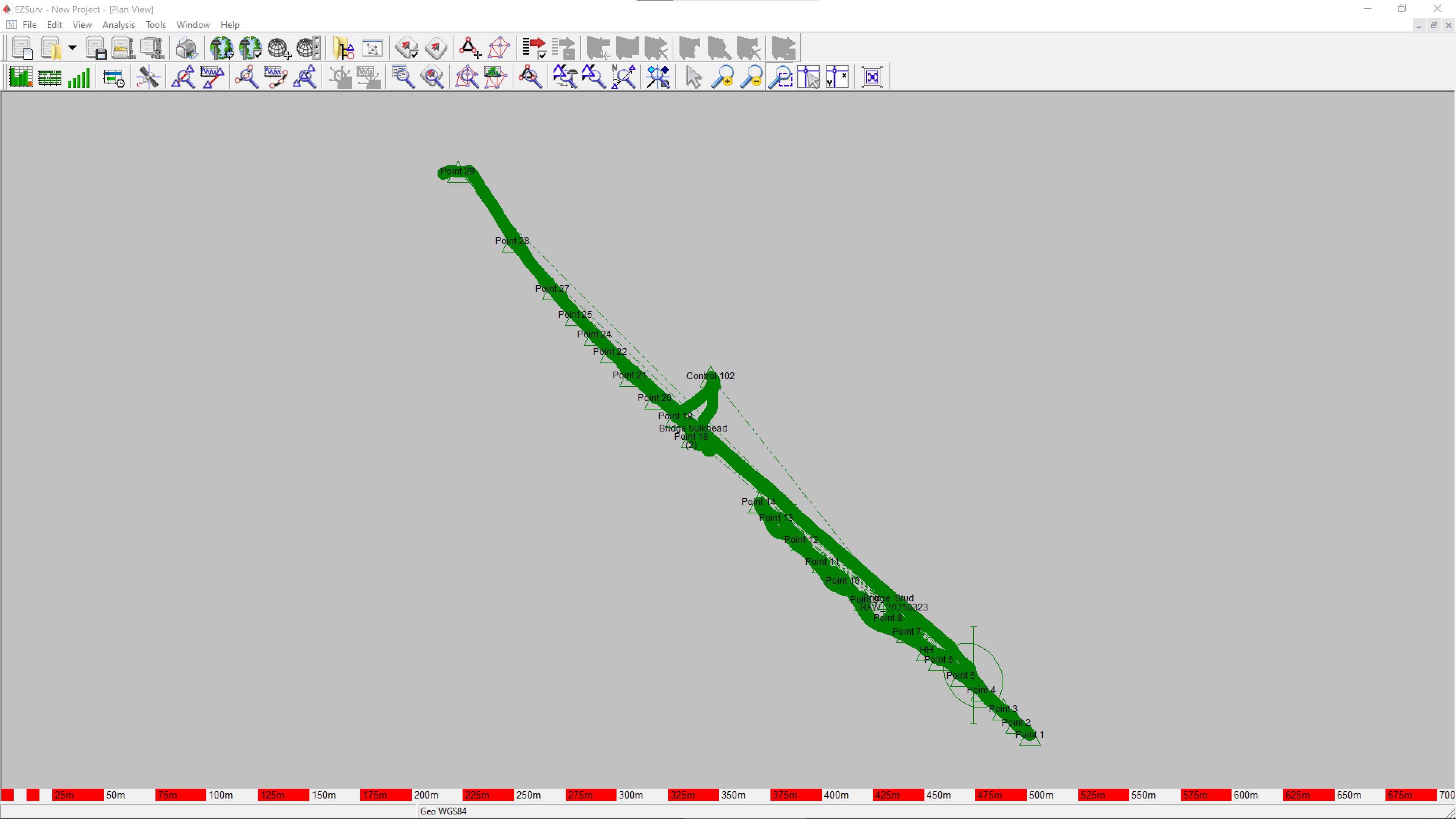
I’m attaching 3 KML files, one showing the actual path and two that show the different outcomes from running the post processing. If you have a minute to look at this info I’m curious where I went wrong. I’m going to try to attach the Log files to another post.KML.zip (13.3 KB)
Your work looks correct, I’m obviously doing something wrong. Is your question about the mapping system when I’m doing my data collection or in the post processing? In the survey mode I’m using the stock setting of the RS2 units, LLH. I suppose that makes it WGS84? Is there a setting that I missed in the post processing for that?
The system you want to end up with. Trying to see how aligned my postprocessing is with your RTK-results. But Base height and coordinates skews it quite a bit
You can go at it more or less immediately, but your base should have 2-6 hours of logging time (depending on baseline and environment), if your base-point is an unknown point for later determination for post-processing.
I end up in GA83-WF EPSG 2240. This is US-Georgia-West-Feet. I don’t use the Height values as they are not pertinent for this work. The attached SHP shows my points after I moved them in AutoCad to align with 2 control point on the project. I had wanted to compare the post process results to this shapefile before I ventured out on a project with no control points. Walker bridge-Forum.zip (5.4 KB)
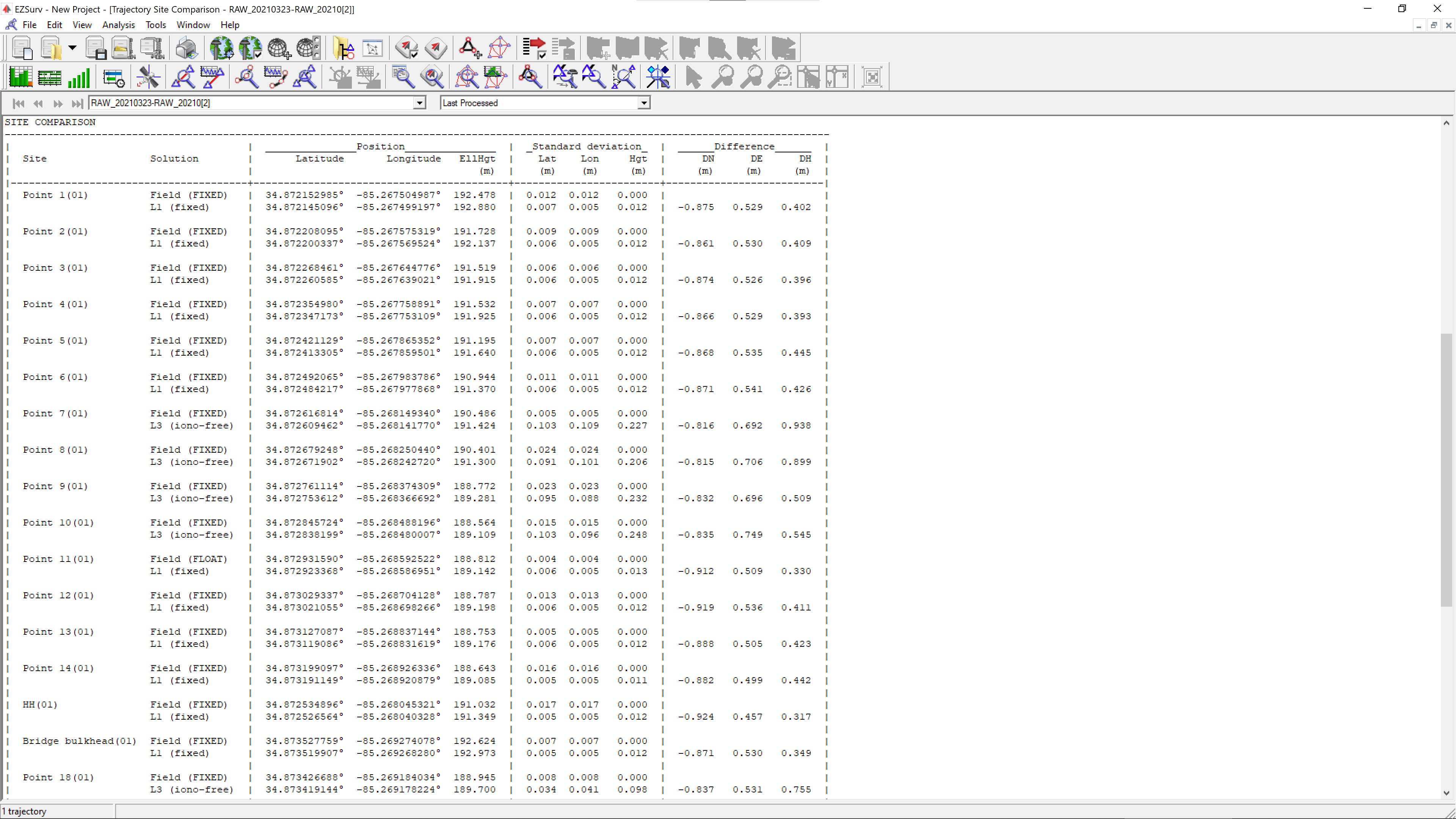
Here are the post-processed coordinates in what I think is the right system? PostProcessedCoordinates.zip (1.6 KB)
Please note that my post-processor could not obtain a fixed solution on your “Control 102” point, so if that is your reference, i’d be careful using it.
In general, your observation-times are very short, especially taking into account all the trees surrounding the road-area.
I will look at this file tomorrow. Thank you for sending it. When you say my observation times are short, what would be a more appropriate time? I kept losing my fix in some areas so I had to get my points while I could. I have no background in surveying so I appreciate any pointers.
In these conditions:
5-10 minutes for your control-points
2-3 minutes for your normal points.
To be sure you have a solid fix, I would change the RTK-settings to a SNR mask of 40 degrees, and (in this case) a angle mask of 20 degrees.
This will make the fix solution harder to obtain, but when you have it, it is trustworthy!
Also, your base has a marginal reception of L2C Carrier Phase, mostly 3-4 simultaneous sats, 4 is absolute minimum. This makes it even harder to use the base to get a solid signal.
Are those RTK settings in both the Base and Rover? I wonder if I’ll ever get a Fix. I’m always roadside, near or under powerlines and often with woods right up to the road right of way.
Rover only. Doesn’t matter on base, as it just logs everything, and doesn’t process.
Your conditions aren’t easy for any GNSS system, so I would suggest to make it a habit to post-process, that will allow to tweak your settings better, and also squeeze more data out of your data.
You can also experiment with a taller pole? I see you are using a 2 meter one now, try with 2.5 to 3 meter.
ANother good idea is to always be aware of the path your are walking to the next point. Make sure it doesn’t break the fix, so don’t walk under a bridge, trees and so on. And if you do, make your next observation a few (4-7) minutes longer. This will help post-processing greatly!
I have a lot of questions for you but right now I just want to say I’m an old man and with those semi trucks driving by at 60 mph it’s mighty hard to hold the pole steady. The system may be able to achieve sub centimeter accuracy but I certainly can’t.
I always use a bipod! There simply no way I can hold that pole still enough to achieve good enough precision.
On another note, that truck could potentially cause a cycle slip, and thus the system has to re-initialize to get a fix.
As an FYI, EzSurv, the post-processor I use reported roughly 20 loss of lock over 1h40min duration of the rover file.
So yeah, you have some tough conditions!
Always! I remember back in the day before they had the screw-on attachments we would use two wood lath. Especially after waking up with a hangover. People think ceiling fans are bad, try staring down a bubble.