



Sketchy data and 3-4 cm residuals vs. setting a hard point, occupying and get 1-2cm… Seems about right.
Continuing connection problem. When we connect the emlid local ntrip to the evo, as stated in the above comment the evo explorer app indicated coords and elevation from the aircraft; I thought this was a red flag, but processed in emlid studio and Pix4D. The resulting contours were off 2.5’ vertical; this is approx the same amount of error from just flying the RTK evo without any correction. This makes me suspect that the evo was not getting the correction from the emlid ntrip, which was set up on a known monument in manual base mode. Can someone tell me how can we confirm that the evo is getting the ntrip correction? Has anyone seen a message in the evo app indicating correction from the emlid instead of the evo? This is a good time for somebody to remind me that we didn’t follow the suggested procedure of connecting the emlid and evo to a 3rd hotspot; we just connected the evo to the emlid hotspot.
Consistently 2.5ft? Normally you wouldn’t be able to takeoff if you don’t have a fix, although if you are already in flight it can drop and keep going.
Smart Controller > Verizon Router > RS2+
It may not work over a phones hotspot if there’s no/sketchy data.
How can I confirm that the evo is receiving the emlid RTK correction if the evo is connected and can take off?
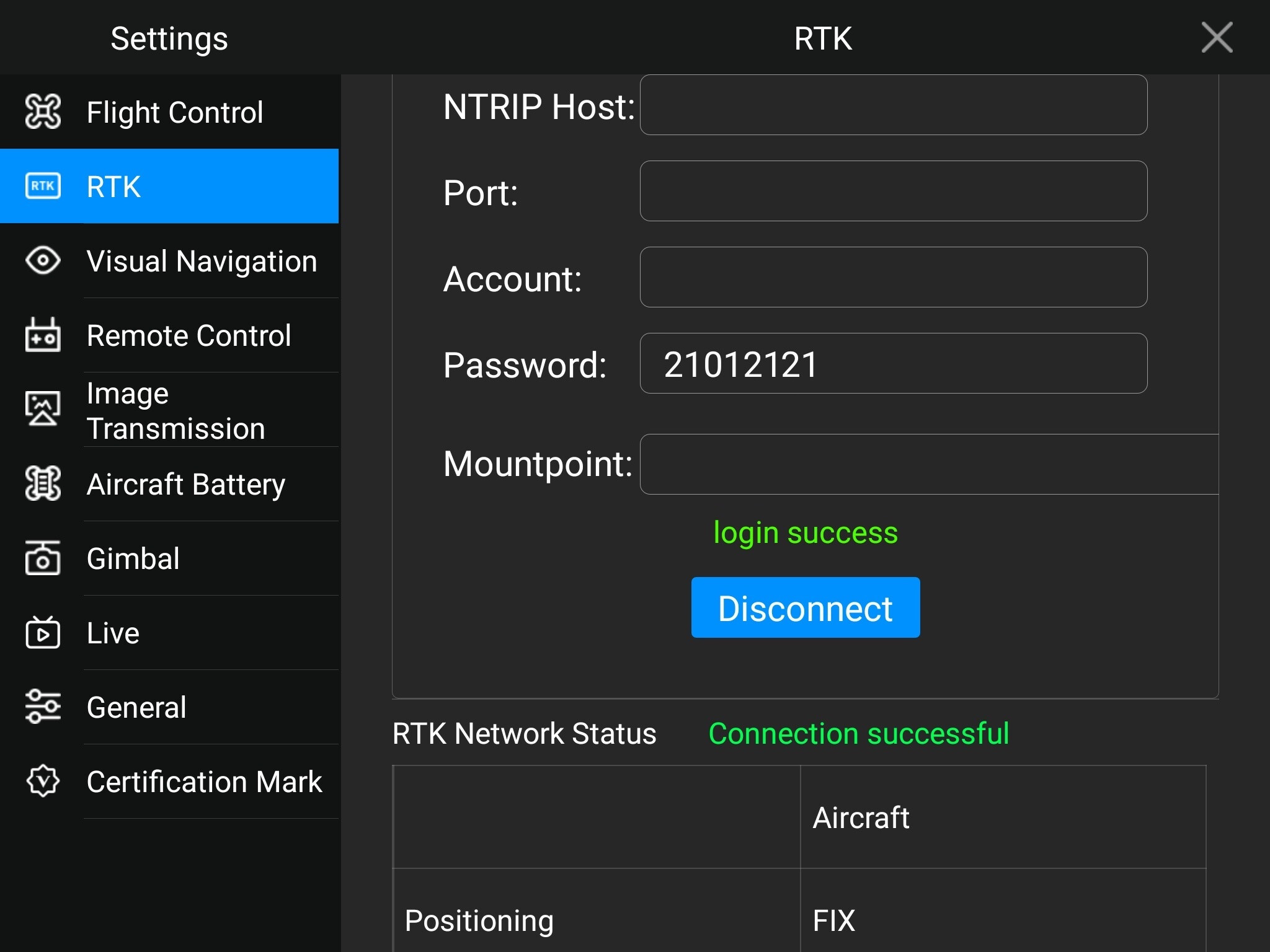
SN, thank you for posting that pic. That’s exactly what we’re seeing: a fix to the aircraft. Should we not see a fix to the emlid? Does the fix statement mean only the emlid is providing that accuracy of data?
Ken, you won’t see a fix from the Base, unless you are tied in to a NTRIP correction service.
The Autel Rover/Controller is reporting a fix because it is receiving corrections from your Emlid Base.
Emlid = Base, Autel = Rover. So if Autel is reporting a fix then you are good to go.
Agree with Mark. Base shouldn’t report a fix as it doesn’t receive any corrections. So, you can start a flight as soon as you see a Fix on your drone.
The base could be reporting a Fix if incoming and outgoing corrections are both on? Basically I never HAVE TO touch the settings whether I am shooting or casting unless I plan on flying the drone with RTKNET. In that case I turn off incoming.
Yes, of course. If a base is connected to an NTRIP service or another base. I didn’t mention it as it seems not to be Ken’s setup.
We’ve yet to try to connect to the NTRIP service, since, doing projects in remote areas of Nevada, we don’t expect to be able to get cell or ntrip service. I think that this field trial confirms that we were getting a local ntrip connection after set up the evo rtk
1 Like
The base wasn’t set up on a known point, right? You just averaged it in Single?
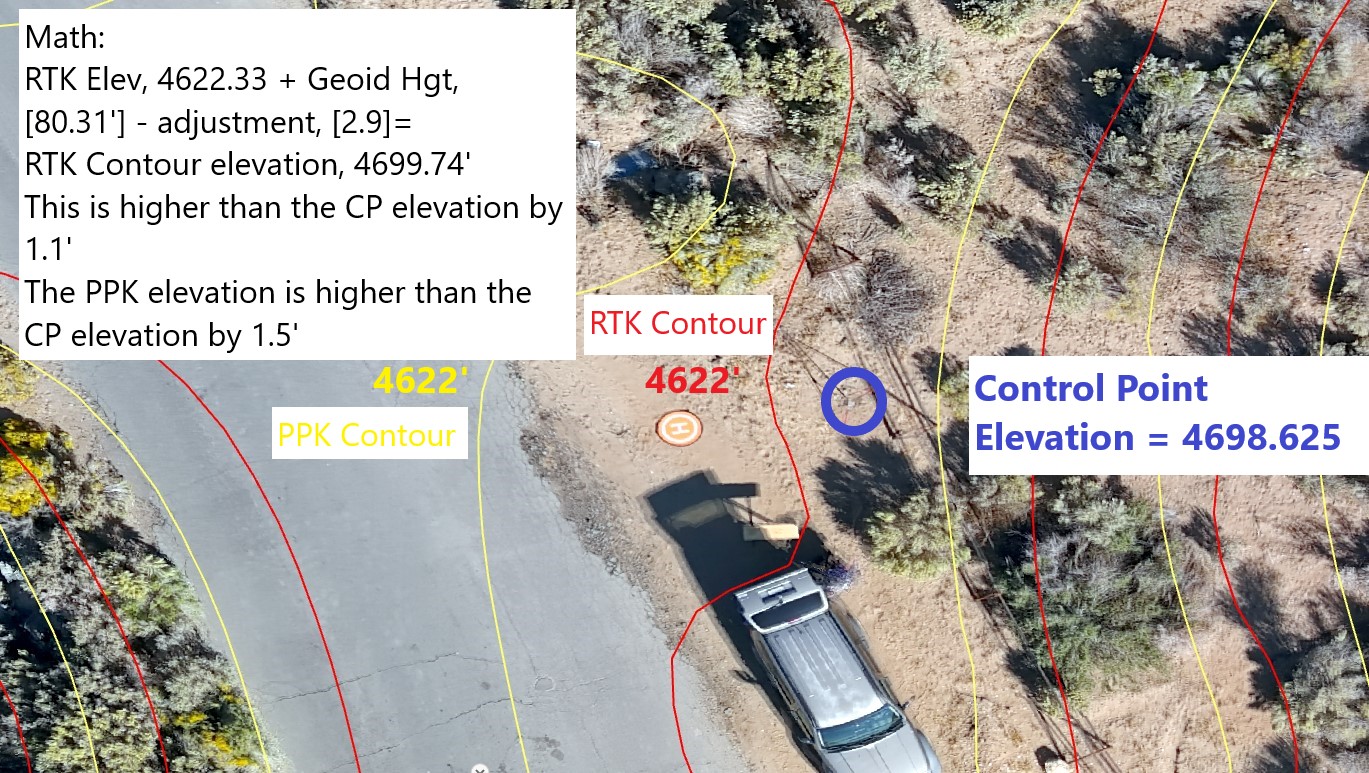
It was set on a known point that I previously captured and averaged the results of 4 opus rapid static [16-min] captures with emlid, prior to the flight. Then, prior to the flight, we set the emlid to capture a rinex and to local ntrip data to the evo. We’re disappointed about the accuracy of both the ppk and rtk contour data. We’re going to repeat the accuracy test over another set of known points. Can anyone report to me the no of GCPs required to achieve a vertical accuracy of +/- 2". Without GCPs, I don’t expect more than 6-9" of vertical accuracy, based on the results we got in this test.
Is your control point in the same vertical datum as PPK/RTK datum? If you took NAD83 (2011) coordinates from OPUS, I suppose it should be the ellipsoidal height above GRS80.
This might be a little off topic but it’s the closest thread I’ve found that might be applicable. I recently purchased a Autel EVO 2 RTK v3 as a backup to my M300 and for use on smaller sites. My setup is using a RS2+ as my base sending correction through caster to the drone, it’s been working pretty well with the M300 figured it should work the same with the Autel…for the most part it seems to. So far I’ve gotten a fix on the drone in under a min or so. Fly the mission everything looks good.
The issue I’m having is my elevations are off by 80 to 100 feet. I expect anywhere from about 83 to 85 feet due to the difference in ellipsoid to height.
I use Pix4d Mapper to process the images and it has the option to adjust for the Geoid height, typically between 83 - 85 feet, at least here in central Texas. To me it looks like the processing isn’t adding that Geoid height when processing step 1. I’ve run the map twice once using the Geoid offset and once without, the difference between the 2 maps on a known point is about 2 feet. Which doesn’t make sense to me either, it’s either using the offset or it isn’t.
I have a support ticket open with Pix4d but thought I’d try here since there’s a lot of folks on here that have way more experience with Autel than I do.
If there’s a post somewhere that covers something like this I’ll be glad to read it and not waste anyone’s time…just couldn’t find one.
Thanks.
What is the altitude recorded to an image if you have FIX status and take a picture with the drone on the ground next to the RS2+ ?
1 Like
It is definitely the GEOID separation. The question is why Pix4D isn’t accepting the values from the Evo 2 RTK like it does for the M300.
Hey Dave, Weather permitting I’ll check that out today. But like Michael said I think it’s more to do with Pix4d…my guess anyway since this all works with the M300.
1 Like
Hi @svetlana.nikolenko The base is set to 6360. In Pix4d I use the Geoid above GRS 1980 Ellipsoid and set it to whatever the geoid height is for the base…typically it’s between -83 to -85.