



hey everyone! I managed to get my drone to fly, but not properly. It shoots up right into the air and does not hover. I am stuck. I know that the escs take oneshot and I am using ardupilot 3.5.5. Any idea of what could cause it? The radio has been calibrated via QGroundControl and the ui shows the current and correct inputs from the transmitters. Furthermore, the ESCs were calibrated afterwards. Any ideas?
A lot, but where is your .bin log to look at some clues?
.bin log? what is the path to this file?
okay I will send you it in a sec
1 Like
10 6-9-2019 8-44-35 PM.bin (279.6 KB)
10 6-9-2019 8-44-35 PM.bin.log (541.0 KB)
2019-06-09 20-46-04.tlog (549.7 KB)
Here are the files I got from mission planner for a flight today
There are some information in your log, and there are also a lot of interrogation.
Did you buy your Navio from factory or second hand (already with some configuration done?)
Your Radio configuration seems to be TAER (according to RCMAP settings)
R/C calibration is coherent with it.
Usually, we prefer AETR configuration (more common) and recommended for your RC transmitter if you want to use Multiprotocol Tx module.
When you arm your motors you use (RC In information) Roll, Pitch and Yaw instead of Throttle and Yaw?

So my interrogation: do you have some mixing programmed in your transmitter? Is it a new one or something second hand with Helico program or anything else different from “New aircraft” with all parameters reset before doing any setting?
At first look, to be confirmed by other on the forum, there is a LOT of vibrations
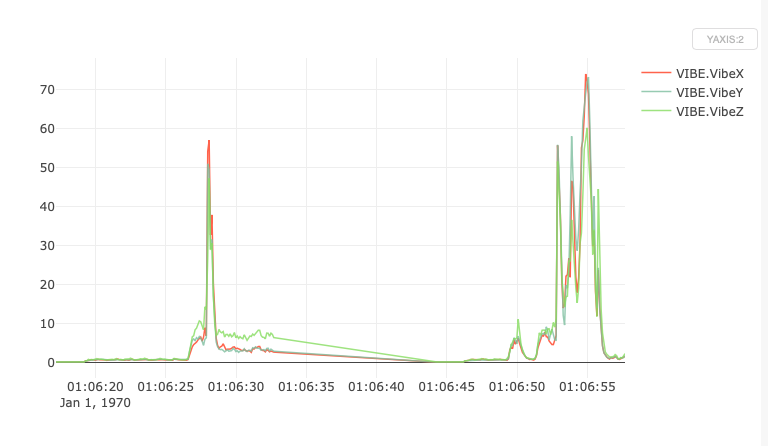
and if your Navio settings are what we see, it should not take off with such low Throttle input.
There is something bad elsewhere.
Marc
Okay. What should i do?
I ordered the navio from amazon. Roboshop was the seller. I believe
I didnt mess with the transmitter at all. It is a taranis x7 if i recall correctly
Could it be the result of a defective navio?
I arm it by moving the left stick to the bottom right
You will have to do some work. I’m not a Taranis user. I can only share 2 links
https://marketchangers.files.wordpress.com/2016/12/frsky-taranis-q-x7-start-guide3.pdf
http://open-txu.org/home/special-interests/multirotor/opentx-apm-px4-pixhawk/
Try to follow theses setup guides and when your Taranis is OK, go back to the Navio setup (all RC related topics).
I hope Navio2 Taranis users could help you.
1 Like
Can it be the reason that there is no vibration dampening? It seems Navio/RPi are hardmounted.
Can it be that the issue is caused by no spring in left stick, Marc? I.e. it affects radio/ESC calibration or arming?
Lucullus - please follow advice frok Marc reg. setup of Taranis.
I do not like the “drone mode” with spring centered throttle stick. On my radio I use the soft helicopter ratchet. Stick stay in position and is more precise without the ratchet falling in each dent.
Calibration values are slightly out of the expected range (1000-2000). I have more concern with the Taranis base settings and I’m quite sure some channels are messed. A complete redo of the Taranis configuration could be a good help to solve the whole problem.
May be the cause. Poor propellers balance could also worsen vibrations.
1 Like
Could this be caused by a discrepancy in protocols between the escs and the navio? Like one outputs pwm and the escs expect oneshot?
No, because you do not set OneShot in your Arducopter configuration. So it use normal PWM, and Oneshot is not working with 3.6.x or 3.7dev with Navio Arducopter (bug still alive).
The speed controllers might not support pwm.
You are thinking methodologically right, keep analyzing like this.
Im doubtful though its protocol-related - it would not behave adequately at all then.
Just my guess.
Could it be with how I setup my receiver? I used a ppm encoder for the first 5 channels. iirc, it is a frsky x7r