Hi Andy,
We’ve just updated the RTKLib distributive with some minor tweaks which improve the calculation of the solution, that is why you might see the difference between the newest version of RTKLib from our site.
We try to adapt our version of RTKLib according to our receivers, that is why you might expect a better result with Reach receivers using the version from us, and also that is the reason why we can’t be sure that the improvements we introduce will be a universal solution for all other RTKLib users.
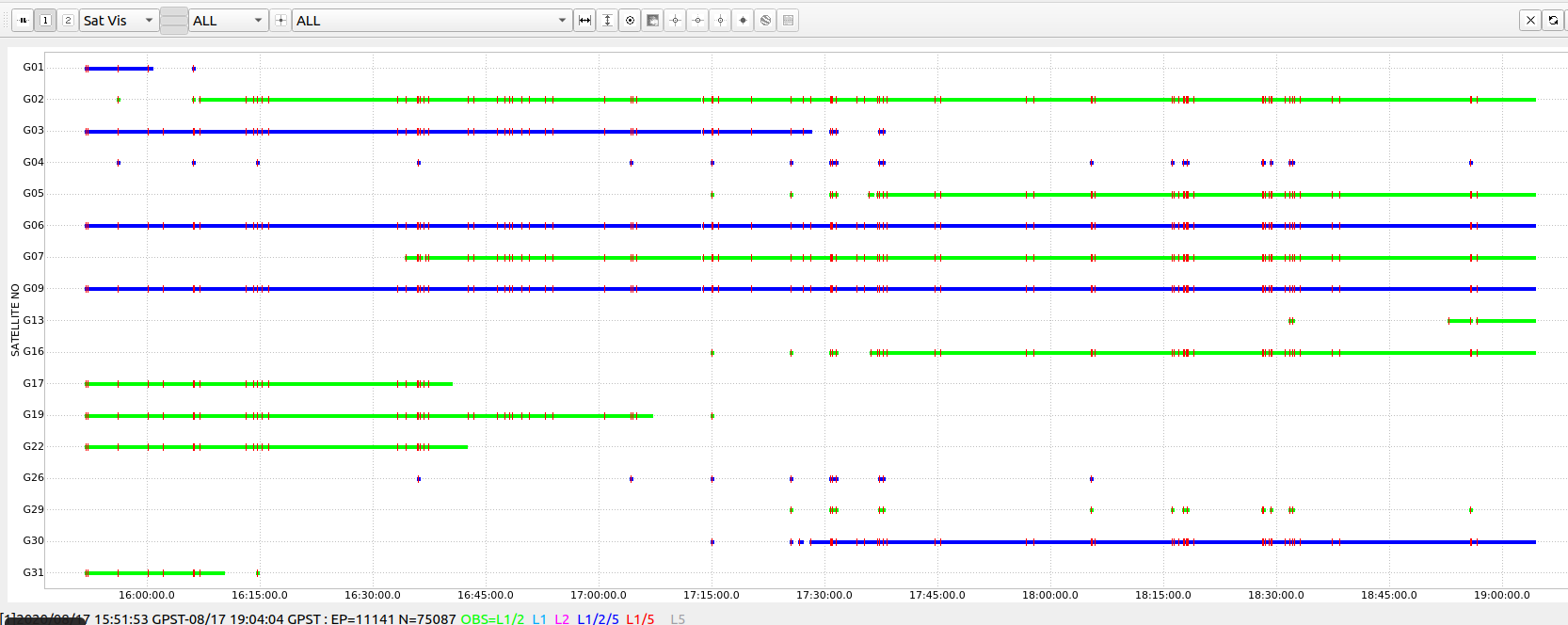
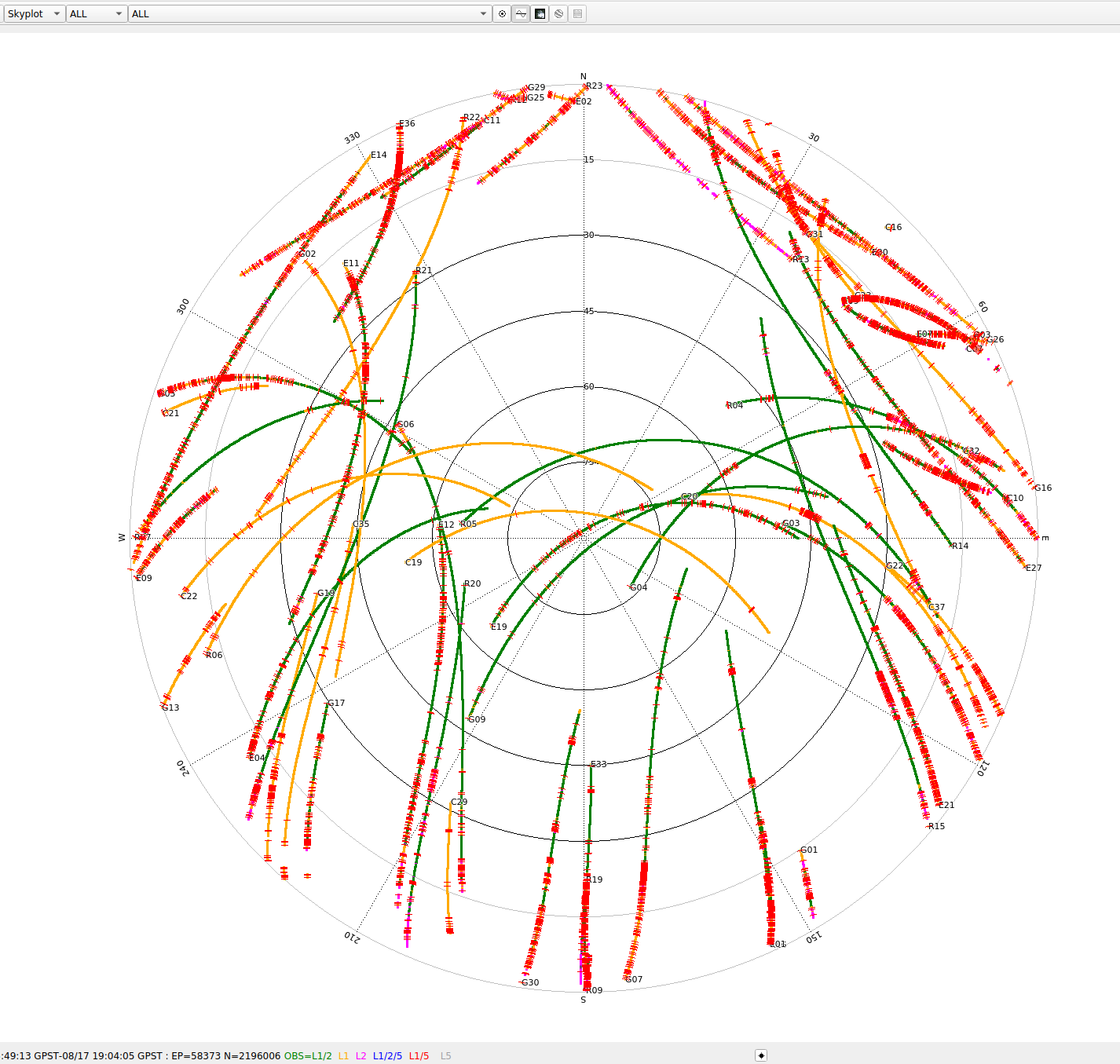
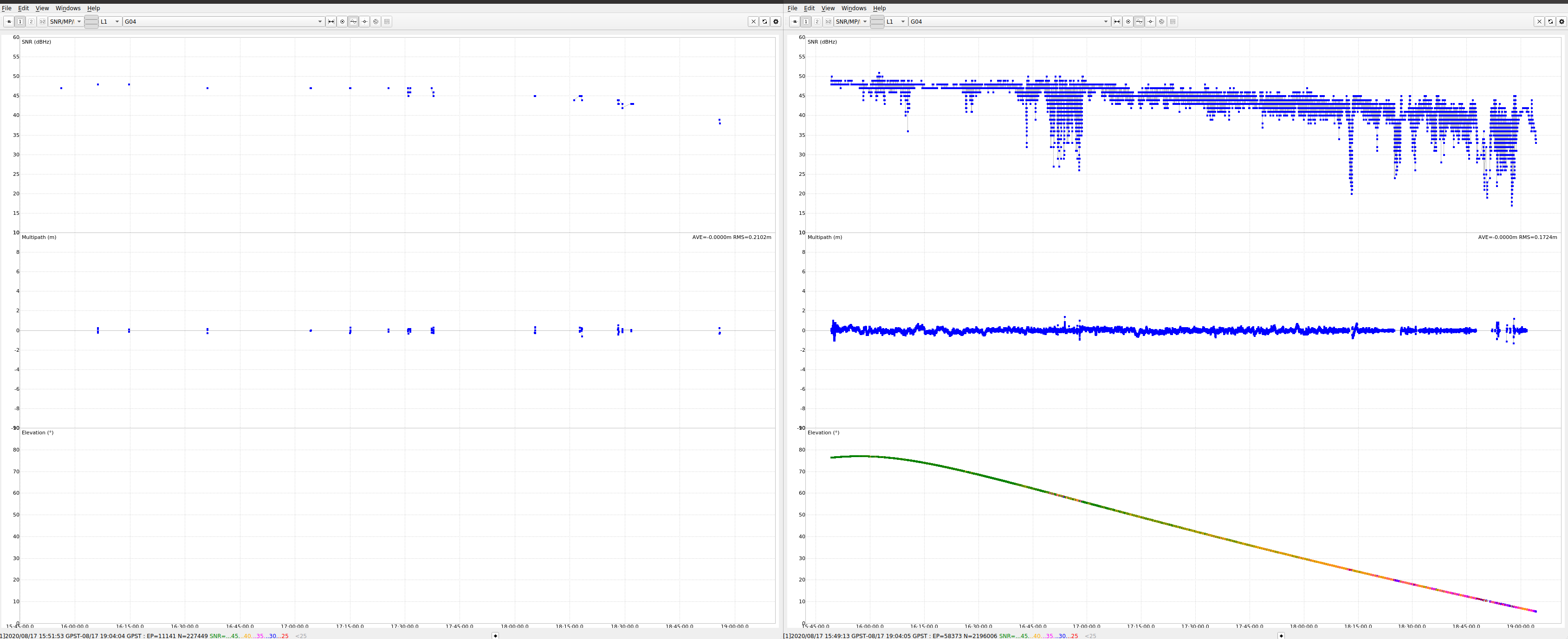
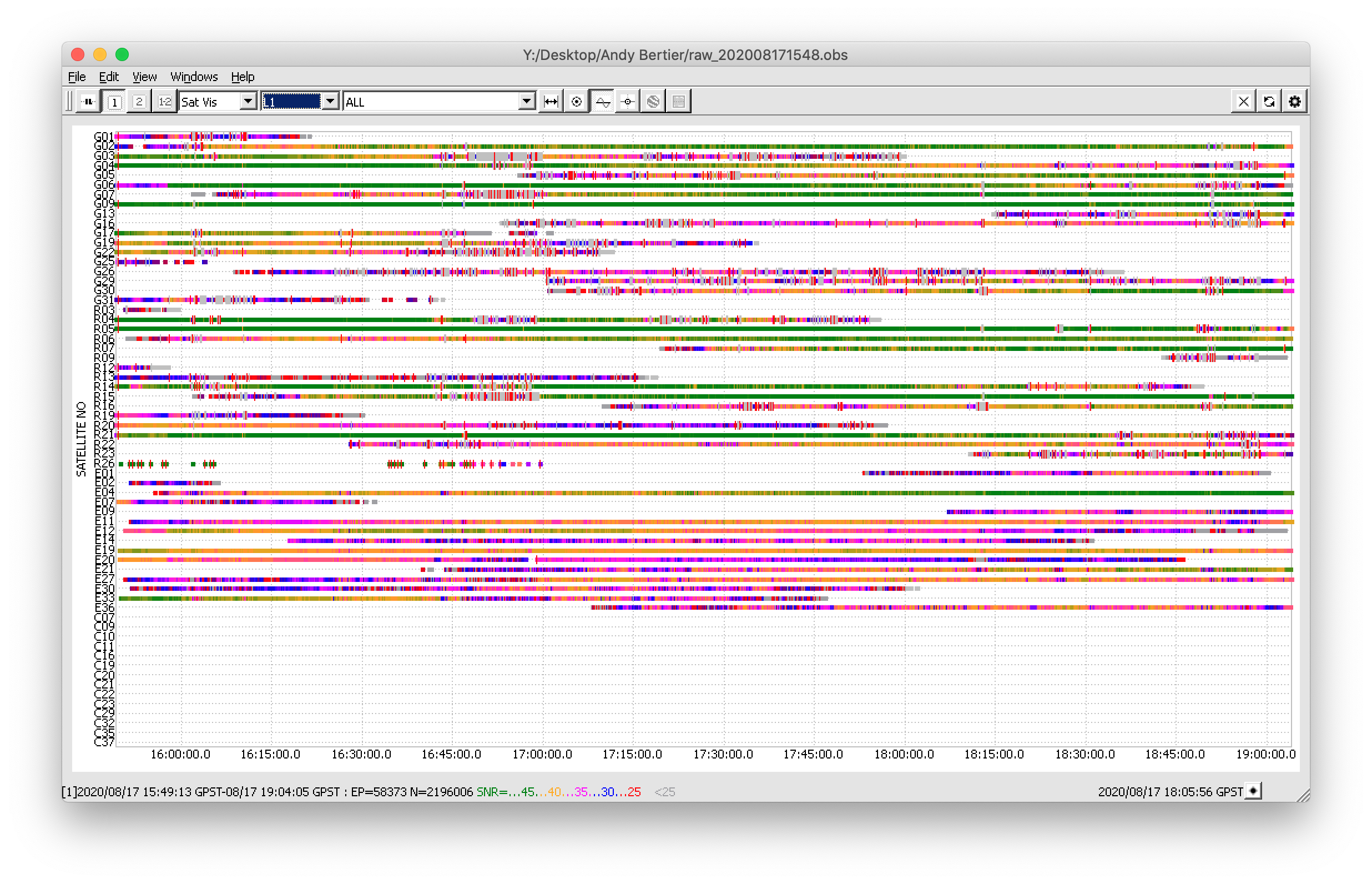
I’ve looked into your logs and I can agree that the satellite vision is not optimal. But in order to check the quality of the signal, I’d recommend analyzing the L1 and L2 solutions separately. The Gallileo signal is relatively poor in the L1 band and there are some cycle slips on the GPS satellites:
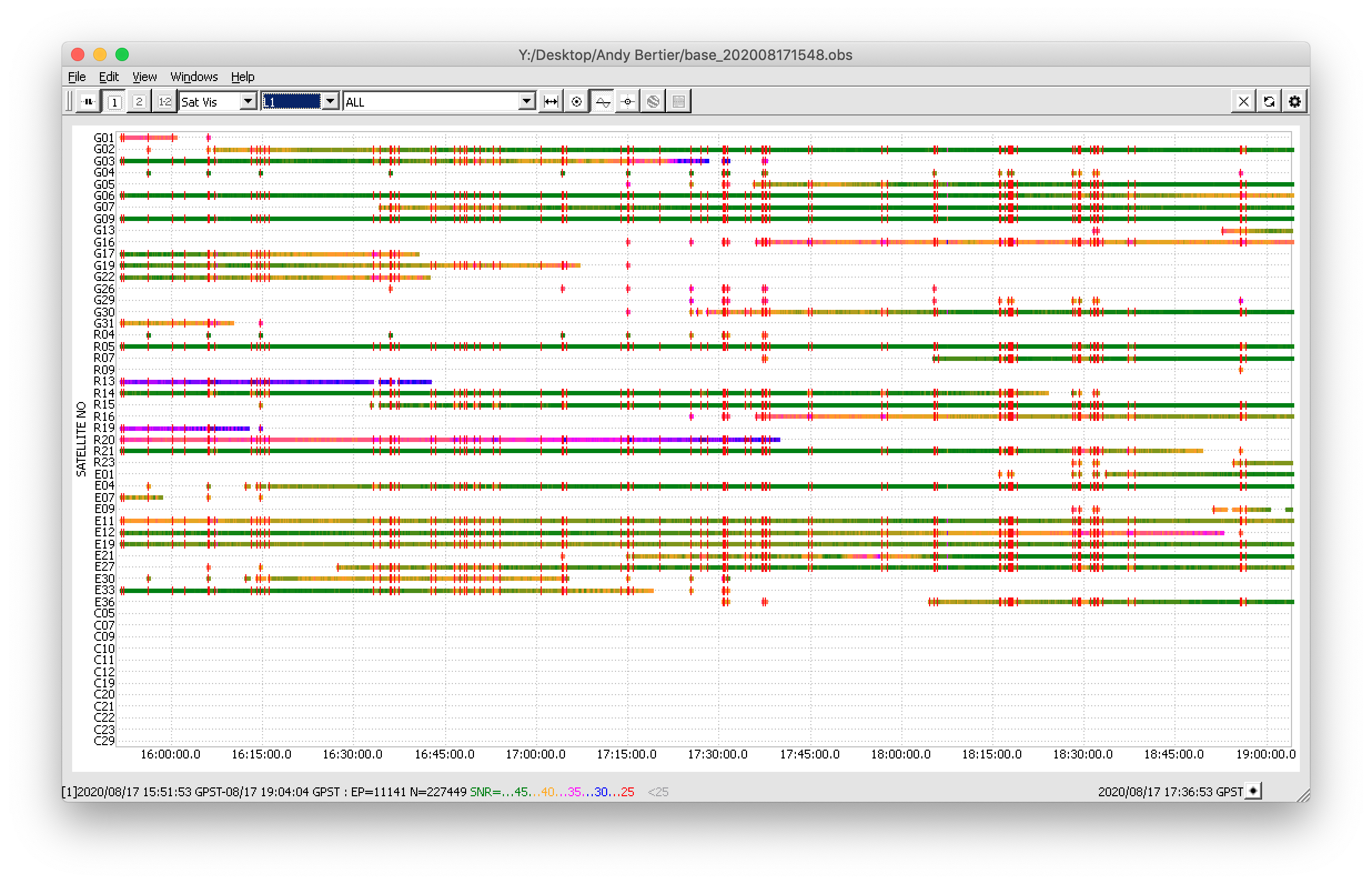
Speaking of the log quality from the base, there are some interruptions there too:
The VRS should not affect the signal quality itself, but it might produce the interruptions in the RTCM3 stream. But sure, this is up to the performance of the particular NTRIP provider, the quality of the cellular data and many other factors, so I would not have considered it as a valid reason. 30 km of the baseline seems fine for the multi-band receiver, but sure the closer one will do a better job.
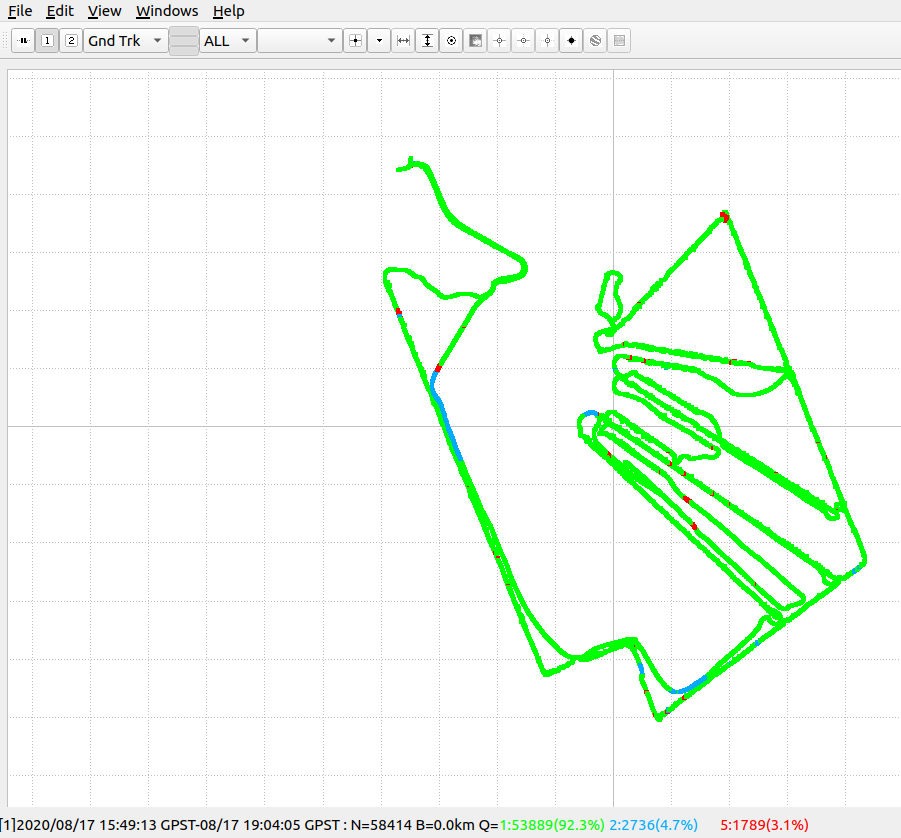
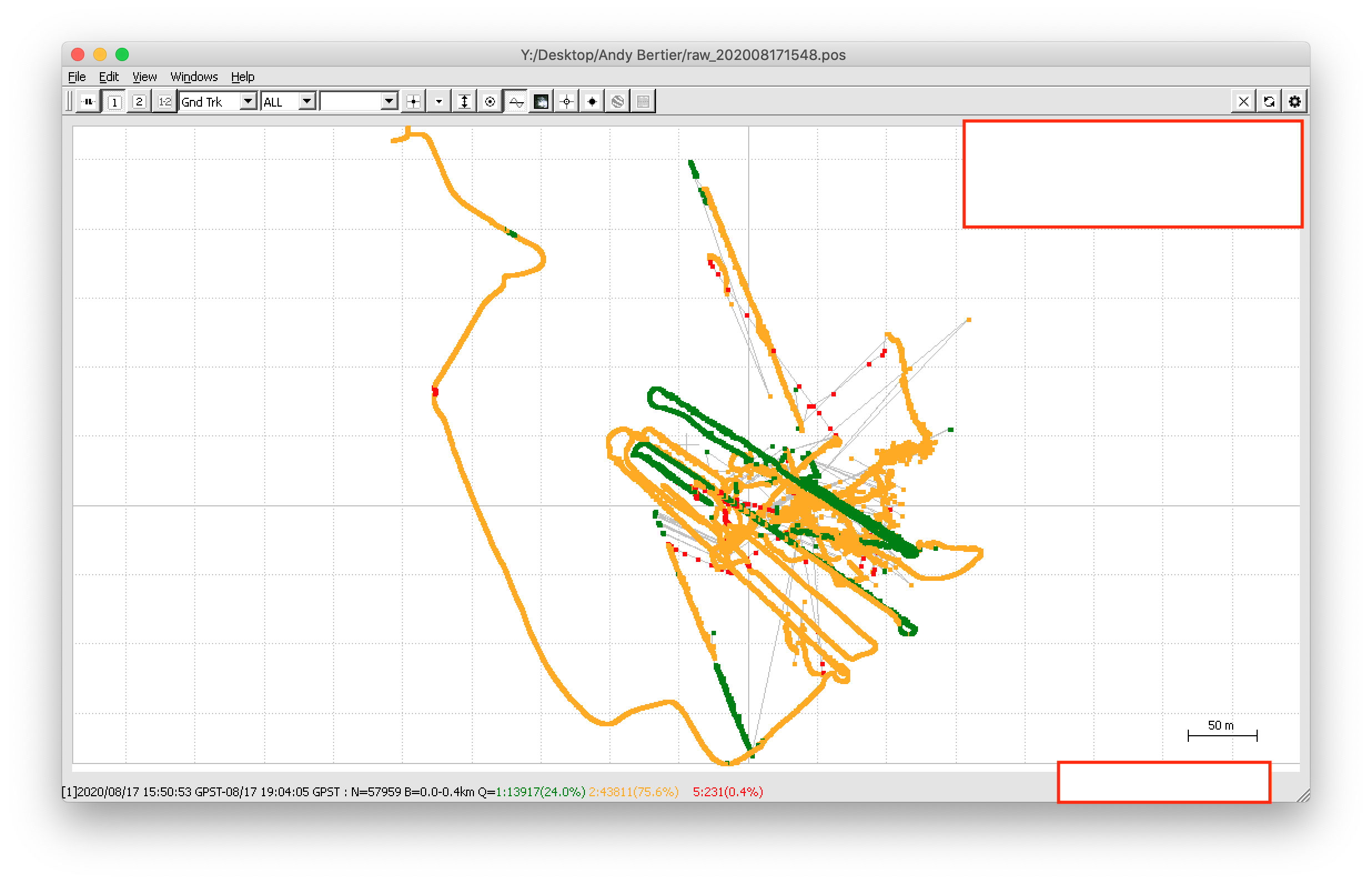
I’m uploading the L1 logs only because the signal quality on the L2 and L7 bands is looking close enough to L1, and more pictures in one post might produce some confusion. So, with such signal quality, I’ve managed to get no more than 25% of fix solutions in the RTKLib version from Emlid, which is an expectable result for the logs of such quality:
The most common reason for cycle slips is antenna placement. You’ve mentioned that the RS2 was placed only 5 cm above the ground, and that might be the real reason for such behavior. Sure, the sky view can be obstructed by the tree canopies, but they should not block the sky view much too. Could you please test the signal quality in the conditions when the receiver’s antenna is at least 1.6 meters above the ground?
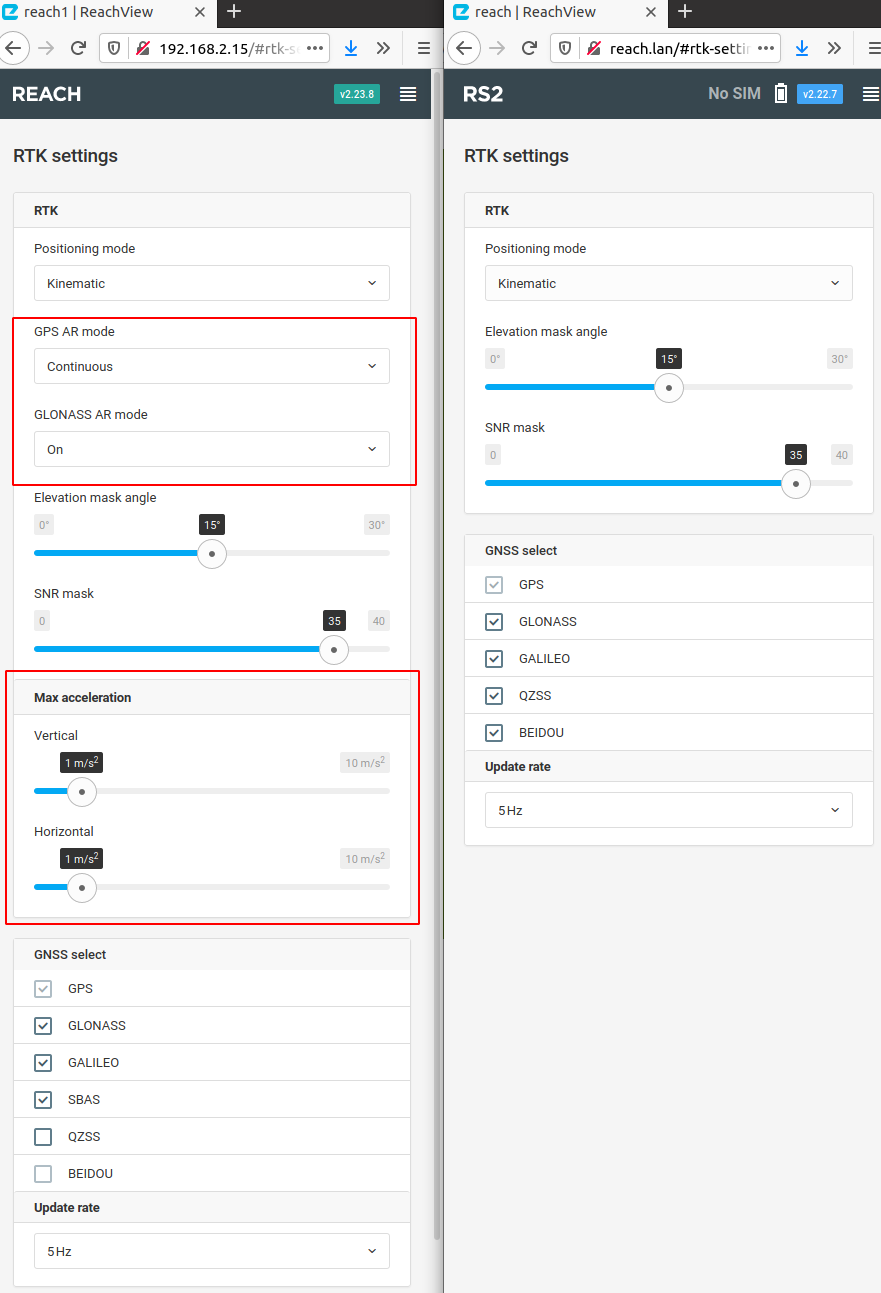
Regarding your comments on the elevation mask, the lower the angle, the more there is the probability that more common satellites from the base and rover will be used in the calculation. So, the elevation mask in the range of 70° might just trim off either the signal from the base or the rover. Generally, we recommend keeping the elevation mask in the range of from 15° to 25°. With the elevation mask of 70°, there might be not much data for calculations.








 )
)