Awesome…you saved me so much time! Thank you Egor!
For anyone interested. I’m attaching screen shots of how I used Ublox U-Center, with the techniques described by Egor, to Survey-In my RTK Base receiver.
Link to U-Center (its free from Ublox): u-center
The settings I used were not ideal, only for demonstration purposes. You will want to survey-in over a longer time span at a better location than I did (mine was near buildings because I didn’t have time to go anywhere).
Surveying-In allows you to obtain a very accurate base location in llh to type into the ReachView Base Station configuration.
U-Center has many other features and gives you access to a lot GNSS data “under-the-hood.”
Enjoy!
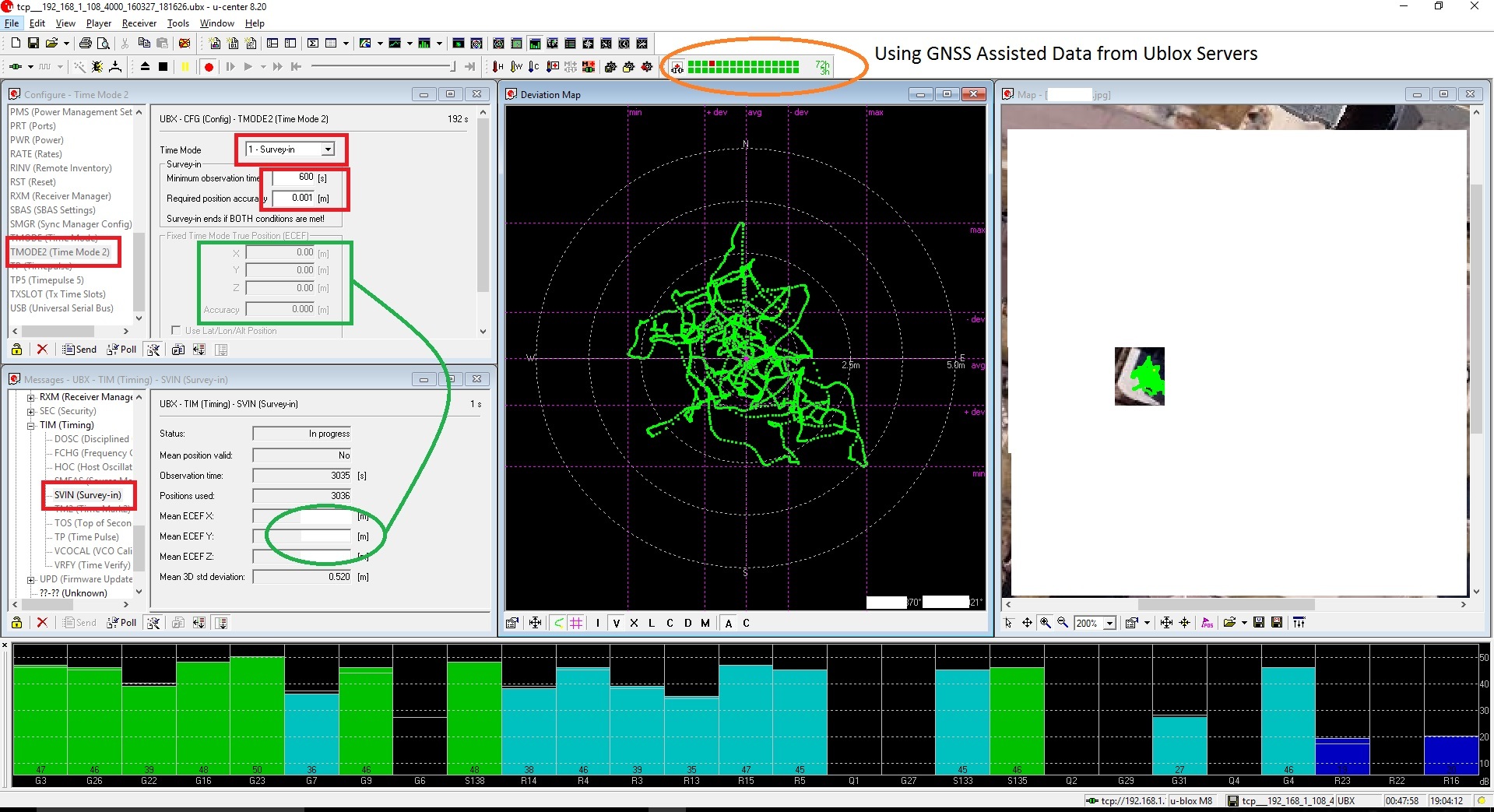
First, select from the Configure Menu: [CFG], [TMODE2 (Time Mode 2)], then select from the drop-down menu: [1 - Survey-in]; it has a default [minimum observation time = 86400], you can change this to however long you would like, but its not as important at the the [required position accuracy]. As you can see, once you [Send] the command, the Survey-In will only end once BOTH conditions are met. The default position accuracy is 0.001 m; I don’t think this is achievable with this type of receiver, so select something reasonable for your application. Perhaps 40-50 cm.
Once, you send the Survey-In command you can watch its progress on the Configure [TIM], [SVIN (Survey-in)] submenu.
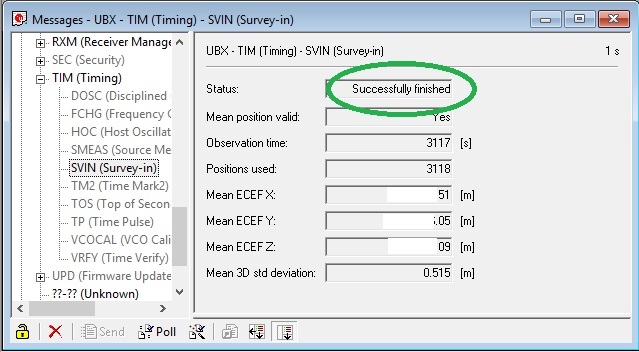
Once the Survey-in completes it will say “Successfully finished”
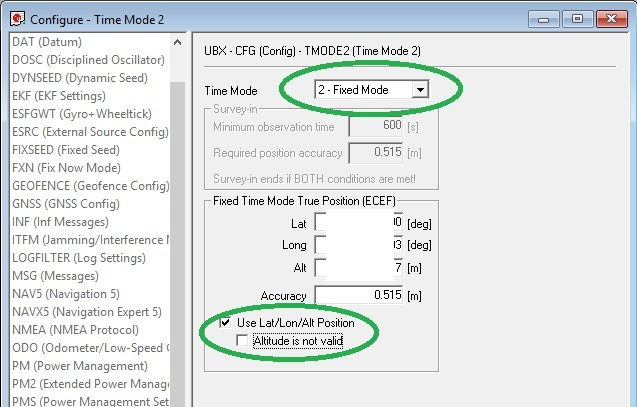
You will need to go back to the [CFG], [TMODE2 (Time Mode 2)], then select from the drop-down menu: [2 - Fixed Mode]; it will first show the mean position in ECEF, select the check-box [Use Lat/Lon/Alt Position] in order to get the llh format required by ReachView.
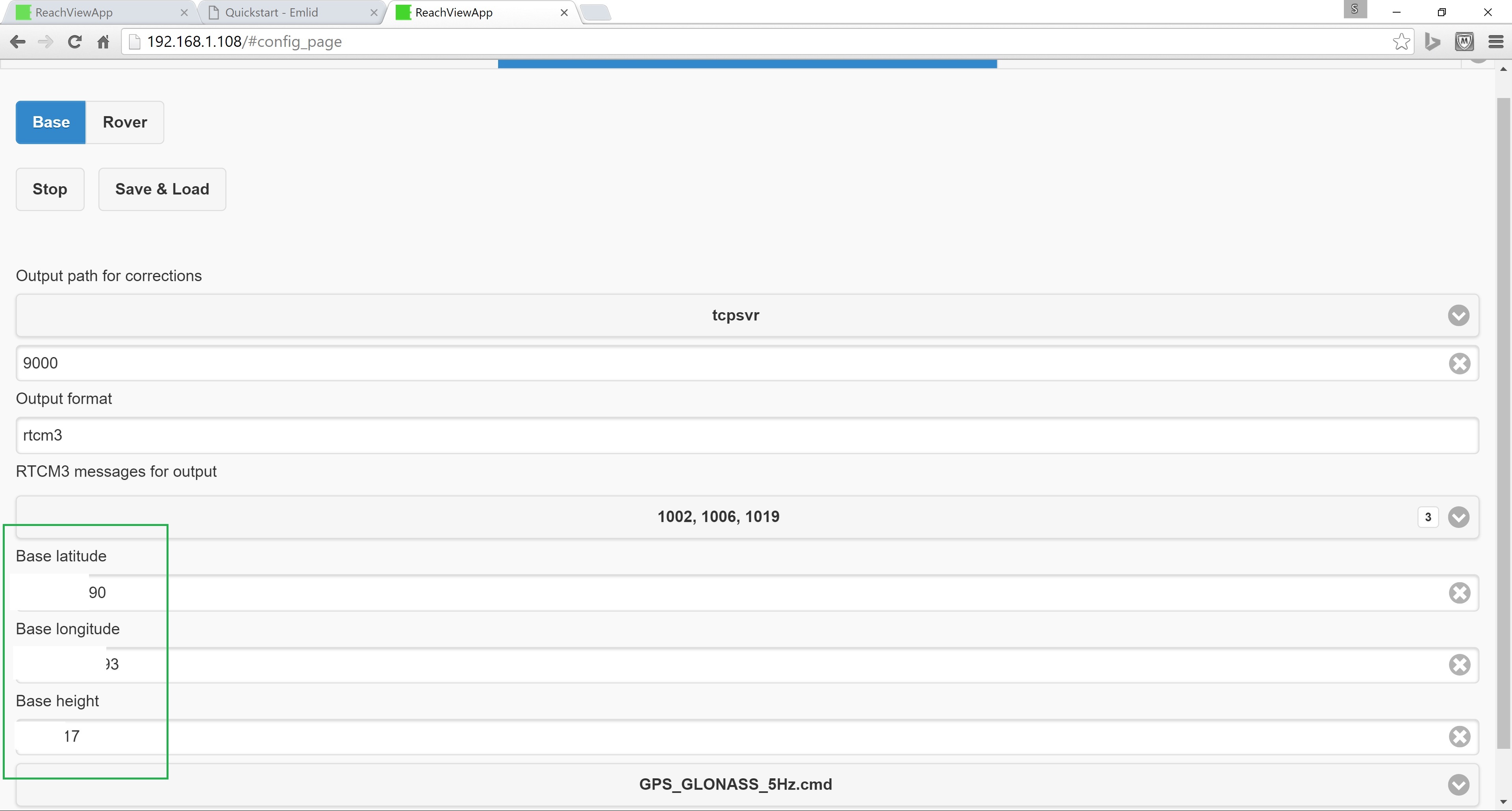
Type in the Base latitude, Base longitude, Base height and click Save & Load
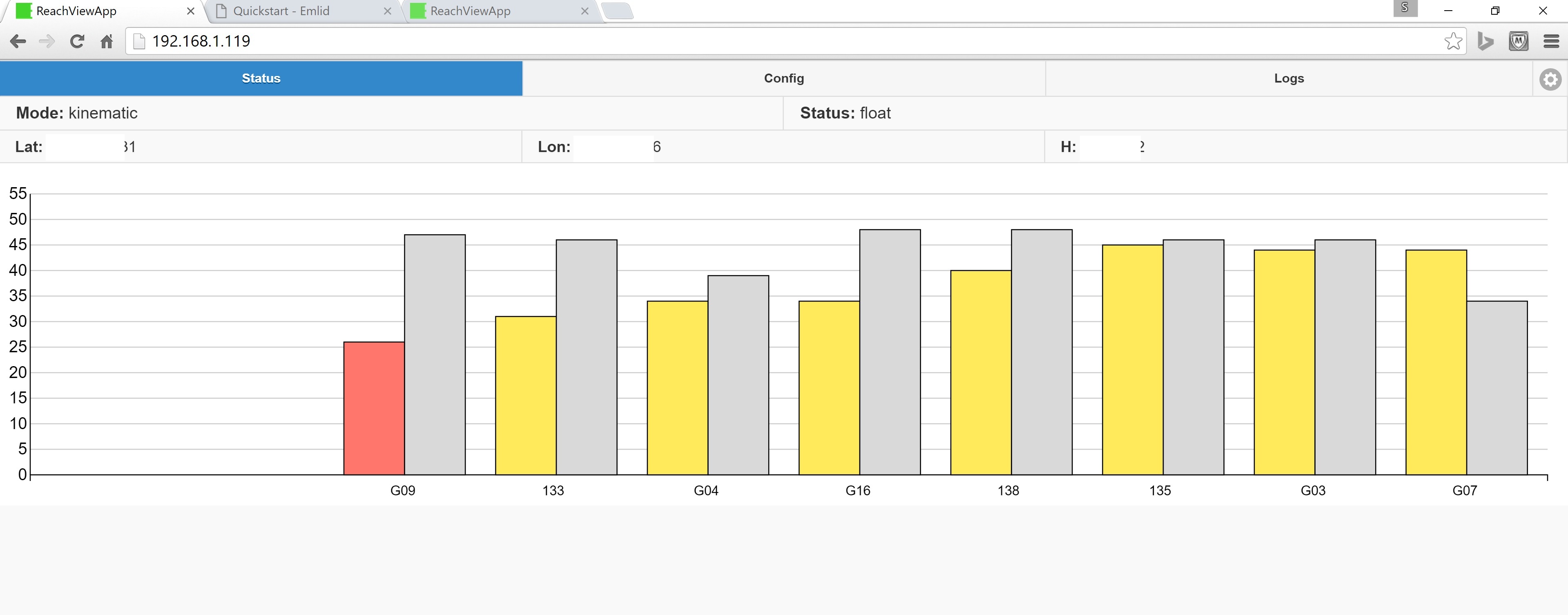
Start your rover, following the instructions provided by Emlid. Notice the status says “float”–I got this while indoors with my rover!!! and my base was set-up next to buildings!!! Not recommended for most applications