@bide on Reach RS2:

Emlid has been kind enough to provide pre-production Reach RS2 units to a few individuals. My thanks to Emlid for the opportunity to be one of the first to work with RS2 and be able to share impressions and observations about it with the community.
In case you missed it, here is some work already posted by @TB_RTK:
RS2 - The 33/66km RTK session with ntrip/simcard
Let us get right into the important stuff and answer your burning questions about RS2.
1st stop is the kitchen:

i. Reach RS2: Does it blend?
Click to find out
I don’t think so, but well … you know … maybe it does ![]()








Reach RS2 almost blended, but luckily due to its phyiscal dimensions it did not. However, it does seem to be able to act in place of the stopper (the lid) of the blender. With this in mind, I would recommend one for every kitchen. ![]()
Please don’t ask me to explain how this has anything to do with GNSS receiver performance. ![]()
ii. Reach RS2: Does it roast?
Click to find out

This not about heat or roasting in an oven, but it does have something to do with a roasting pan.
RS2 was enclosed inside the steel container in order to block satellite reception and break the position solution. This is a quick and efficient way of testing the time it takes for RS2 to recover from a complete satellite blockage.
After tens of repeated tests, it was observed that most of the time RS2 would regain the fix in 10-20 seconds. To be fair, there were times it would take much longer than that, but there were also other contributing factors to consider. For example, because of the signal blockage, the rover would sometimes loose the base corrections as well, and then have to reestablish those first before it could work on the position solution. These test conditions were pretty extreme and RS2 behaved very well in spite of them. Note, the specified convergence time is ‘typically 5 seconds’, which is about right if your RS2 isn’t being housed inside a metal pan and covered intermittently while passersby cast confused looks at you.
iii. Reach RS2: Can you see it in the dark?
Click to find out
OK, we’re out of the kitchen now, and standing outside in the dark. And thanks to the LED display panel, yes you can see Reach RS2 in the dark!
Here is a night-time photo showing full battery (top) and almost dead battery (bottom):
- apologies for the camera blur

iv. Reach RS2: Does it want to play a game?
Click to find out
Rather than make up a test jig with fixed distances or break out the laser or tape measure every time, there must be an easier way to make repeatable measurements:
Enter the board game with equally spaced holes in a grid formation.

It looks like a perfect test bed to me!
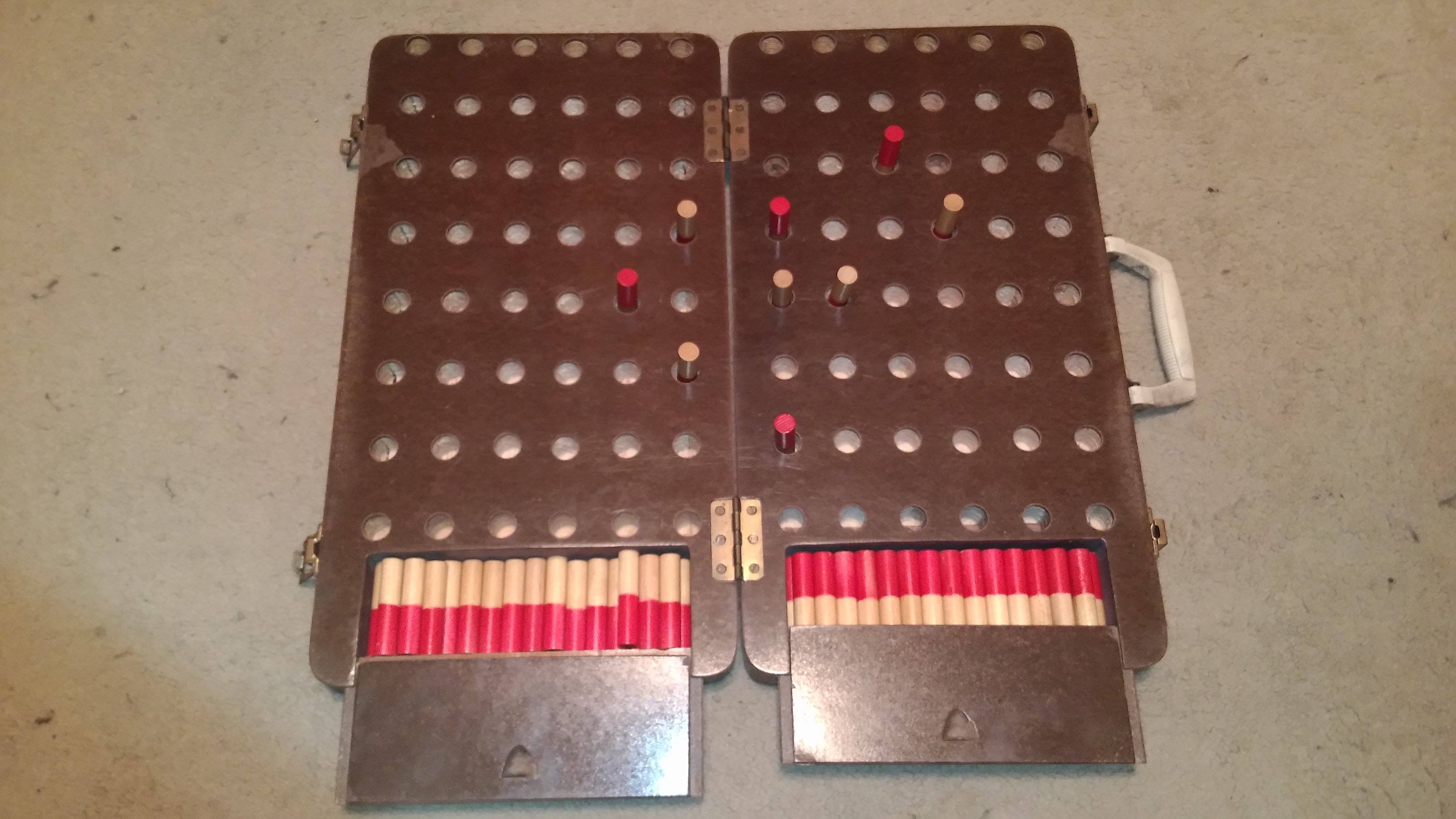
This one above is actually a dexterity test rig:
What is this game with a 12x8 pegboard and 59 double sided pegs? - Board & Card Games Stack Exchange
But where to find such a thing? I think the best place to find this kind of material is in the garage:

Yep, that looks good, but let’s not disturb the tools. We’ll find some unused pegboard material:

Some fasteners are also needed:

Fast forward to the finished grid.
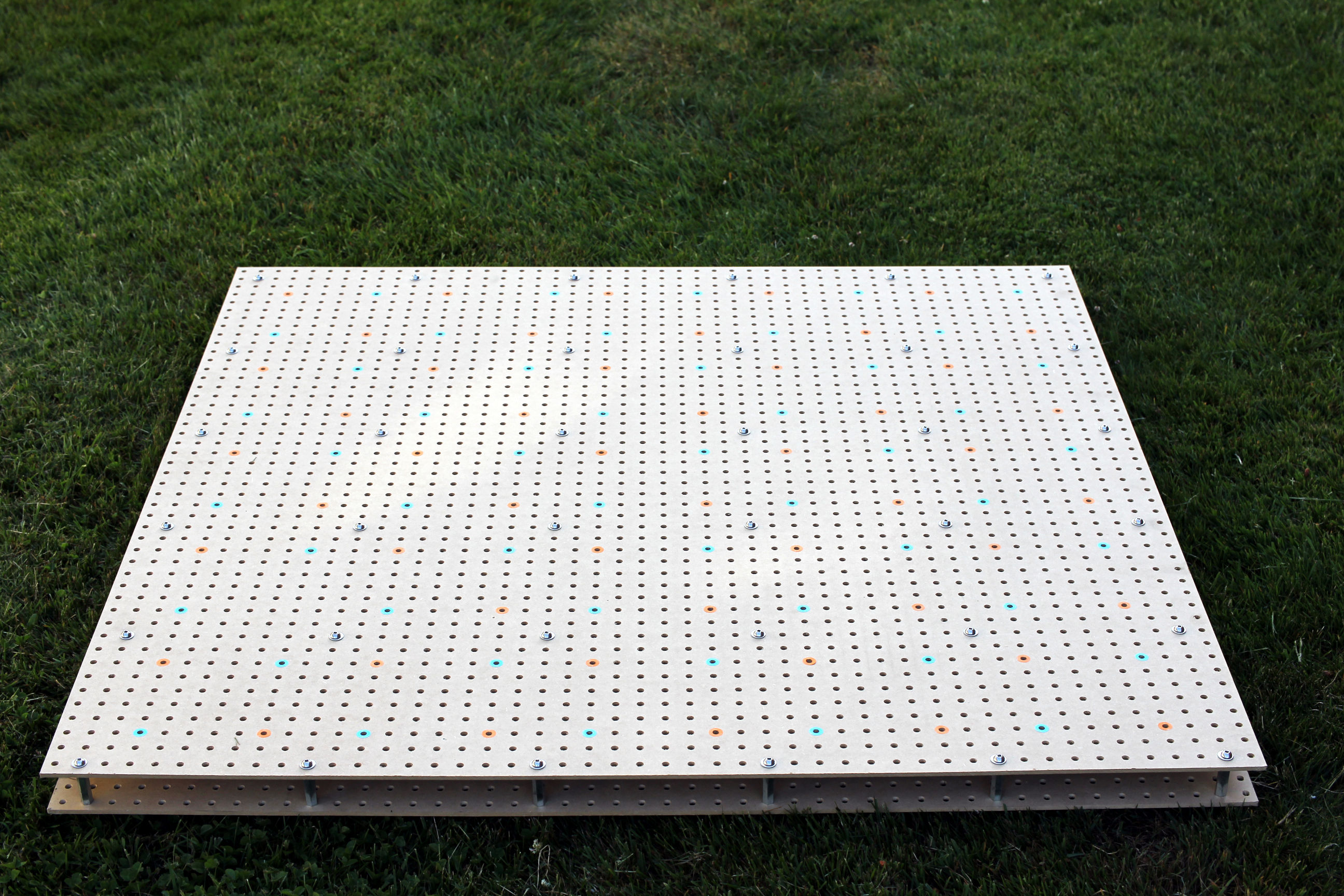
The number of metal standoffs make this a very rigid unit now.

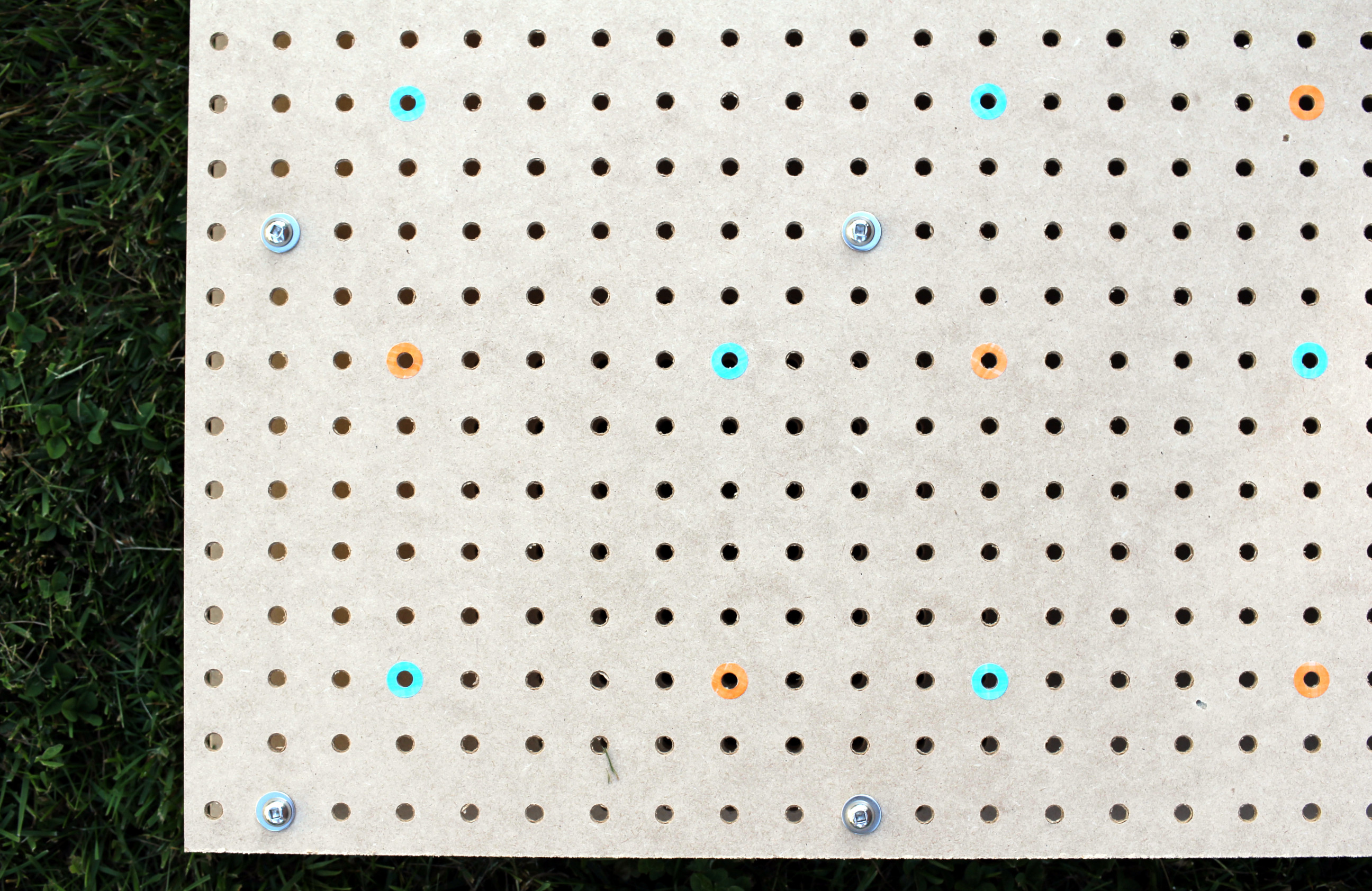
A close-up of the grid.
Here is a thread adapter (5/8" to 1/4") and a threaded peg that was made from a regular bolt.

Peg mount installed in RS2.

This is RS2 pegged into a position on the grid.
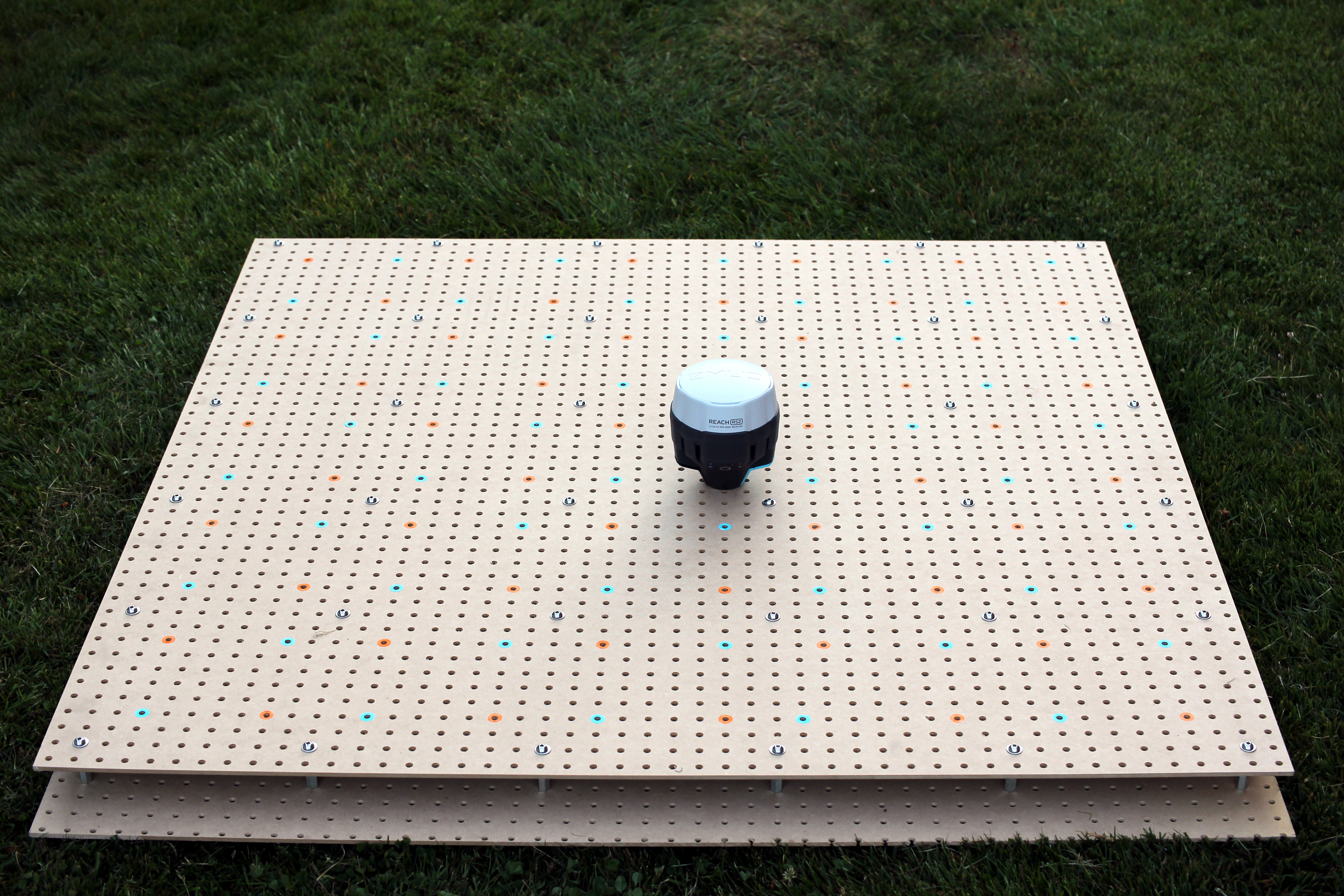
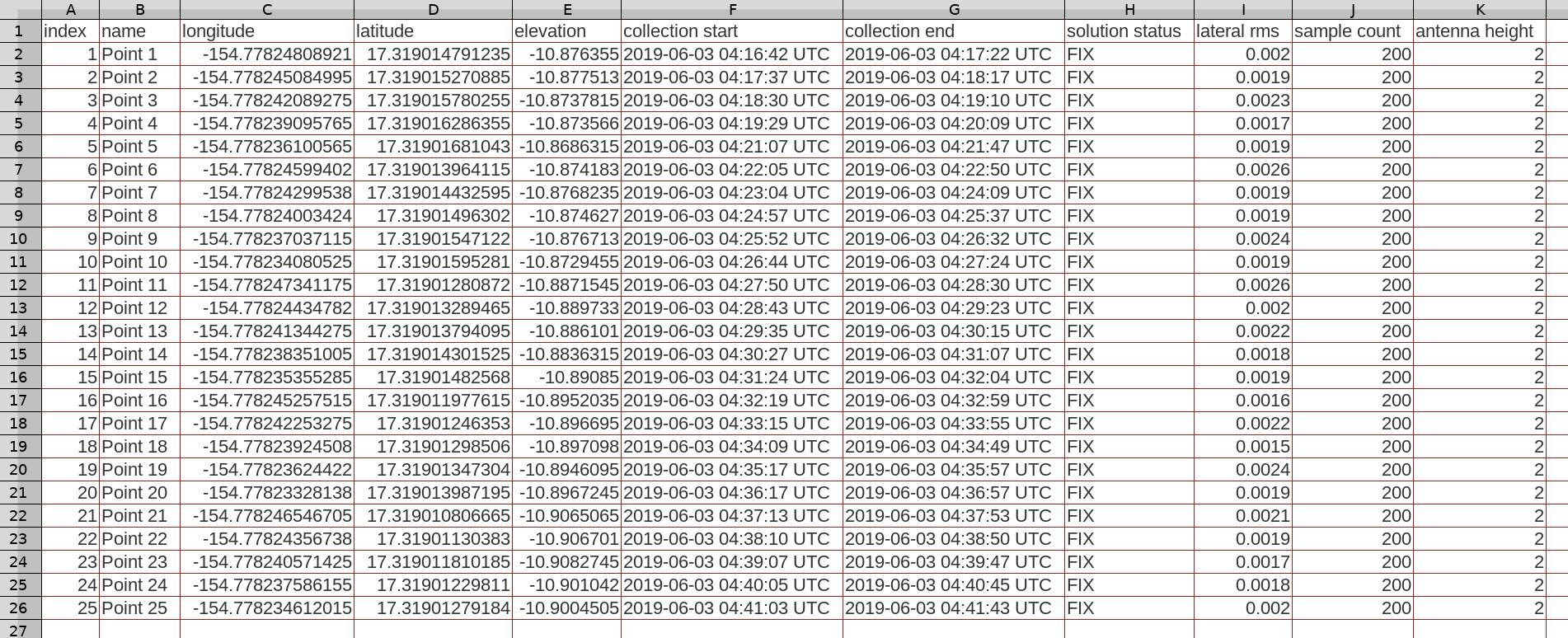
This is the result of a 25 point short-baseline survey project. The rover was pegged into a 5 x 5 grid pattern. A survey project was created and ‘fix’ points were collected with the default settings of: 40 seconds, 0.005 precision, and a DOP of 2.

This is the exported survey project file. The average of the ‘lateral rms’ column is under 2mm:
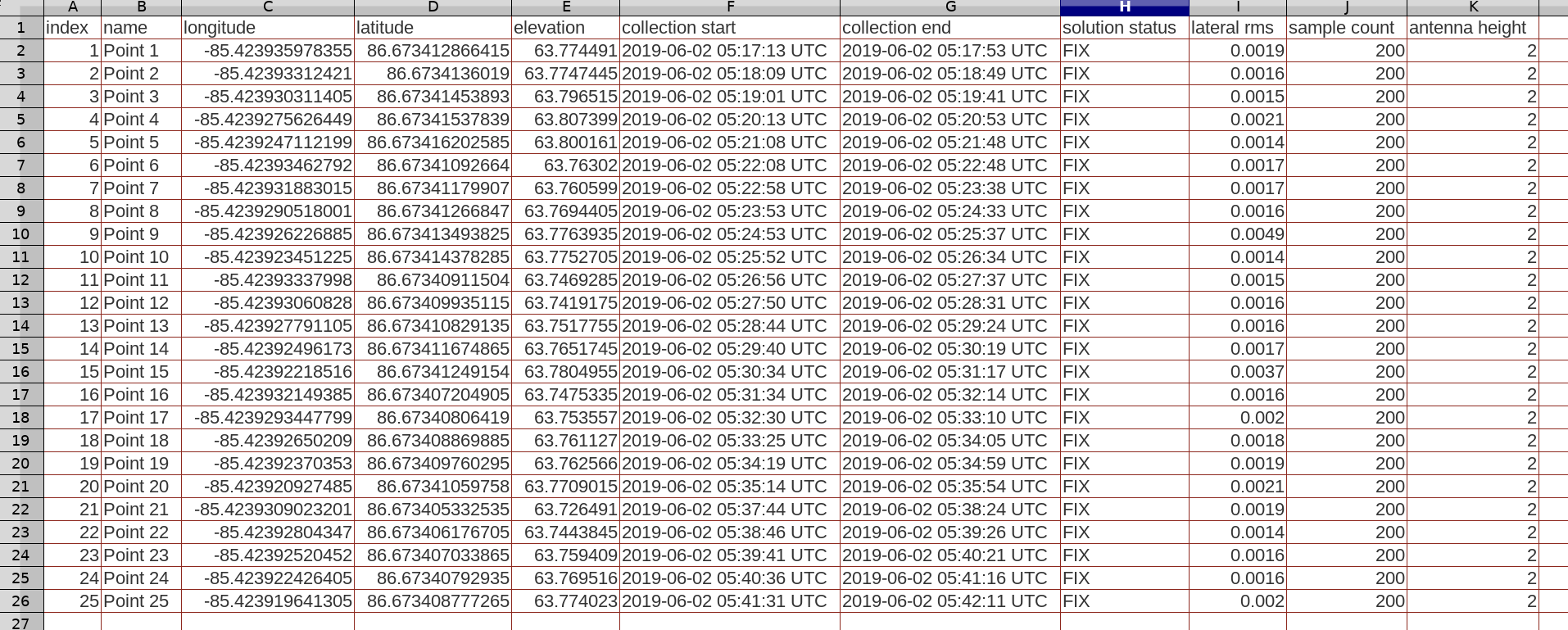
(llh anonymized)
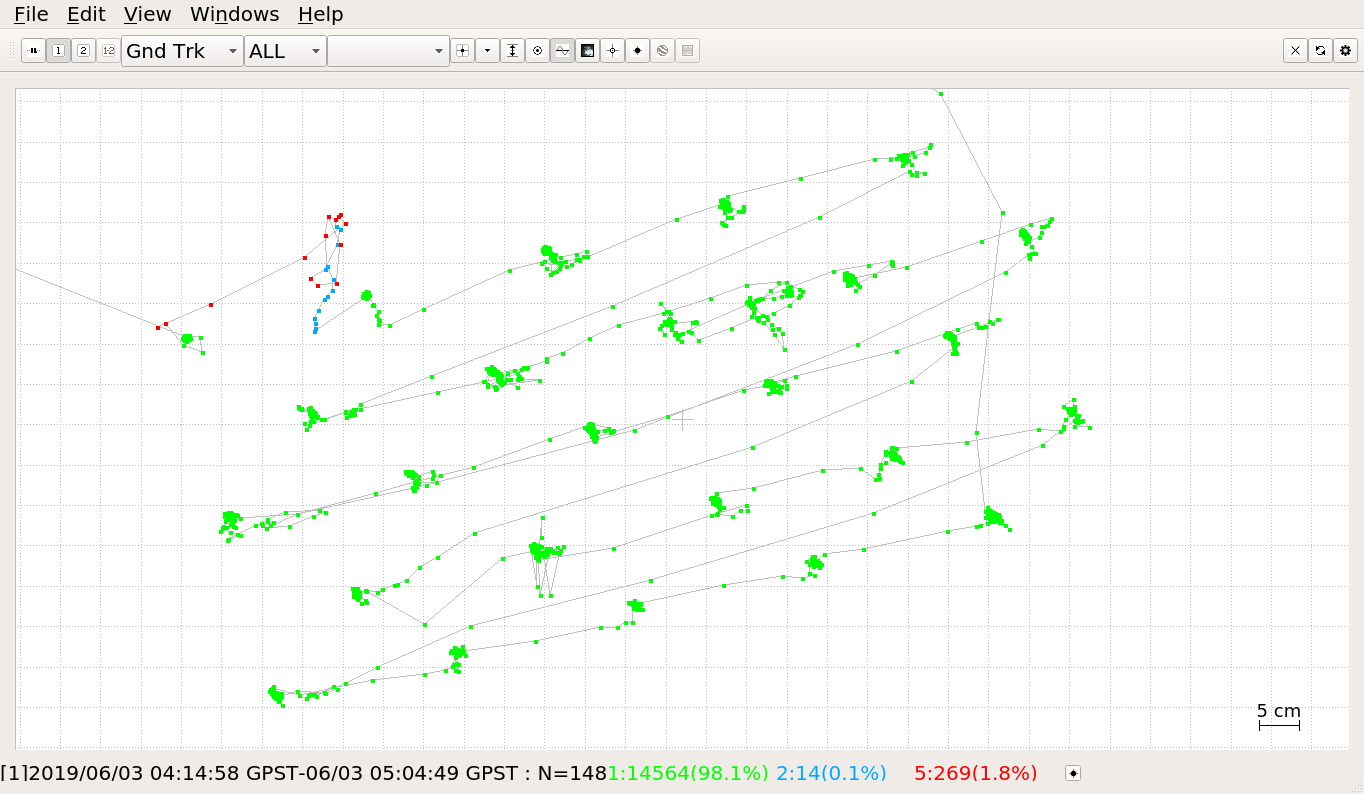
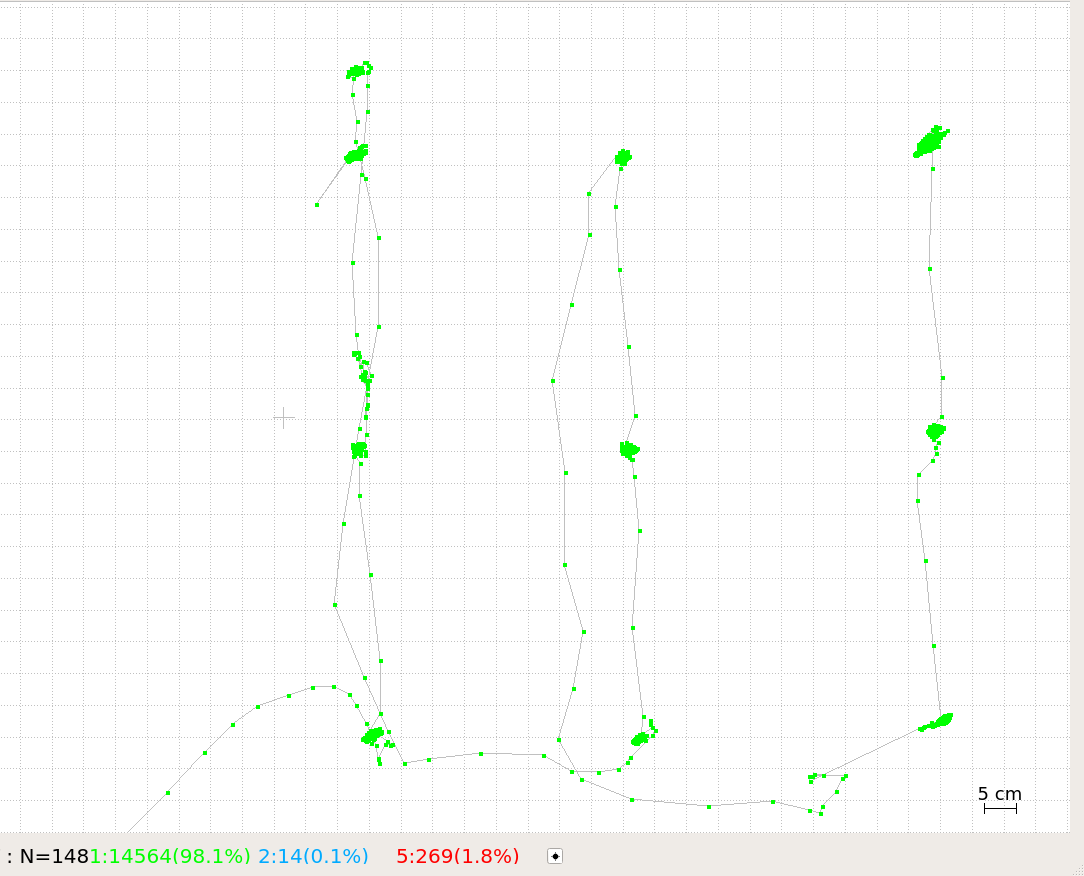
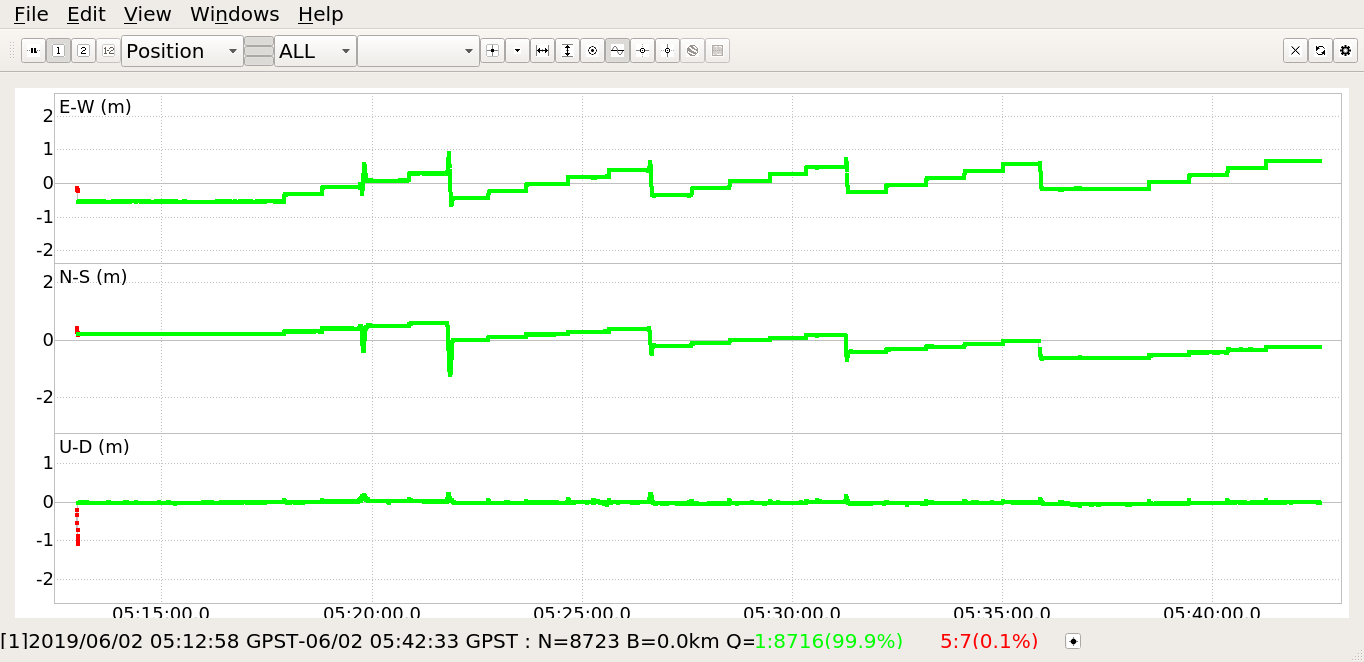
Here with RTKPLOT you can see the movements of the rover over the grid.
And here you can see the rover track. The wandering lines are me moving the rover between the peg holes.
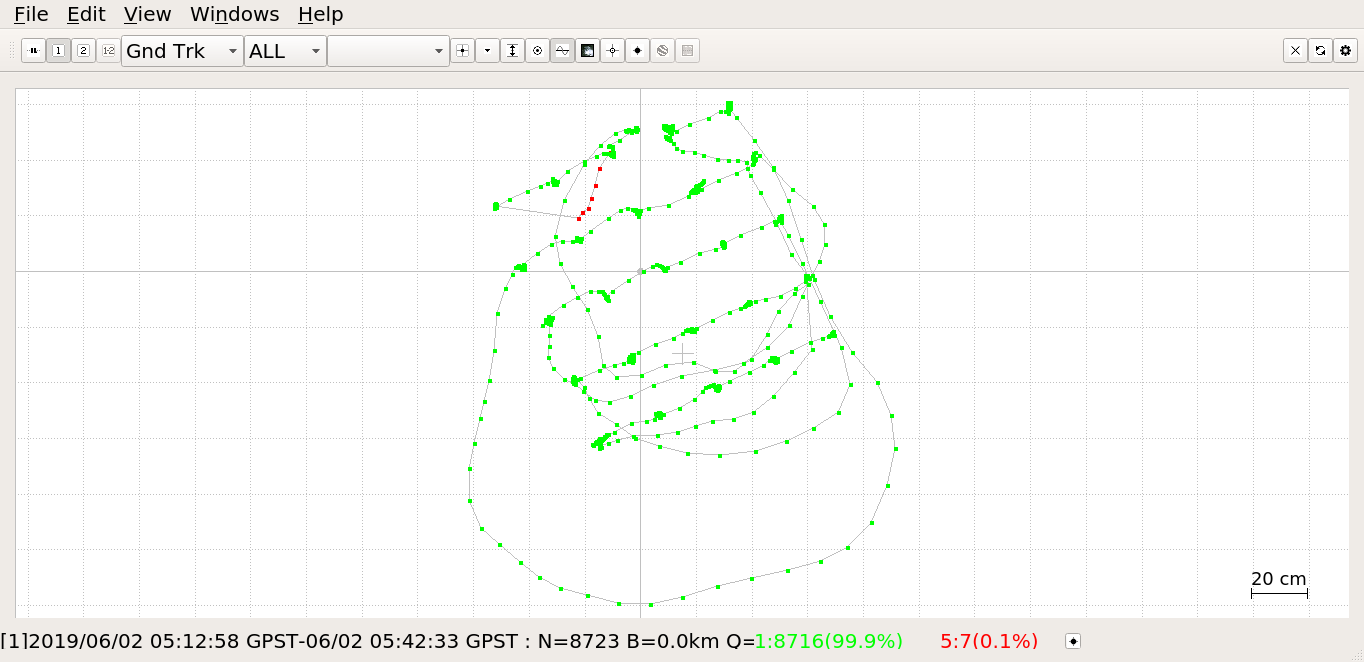
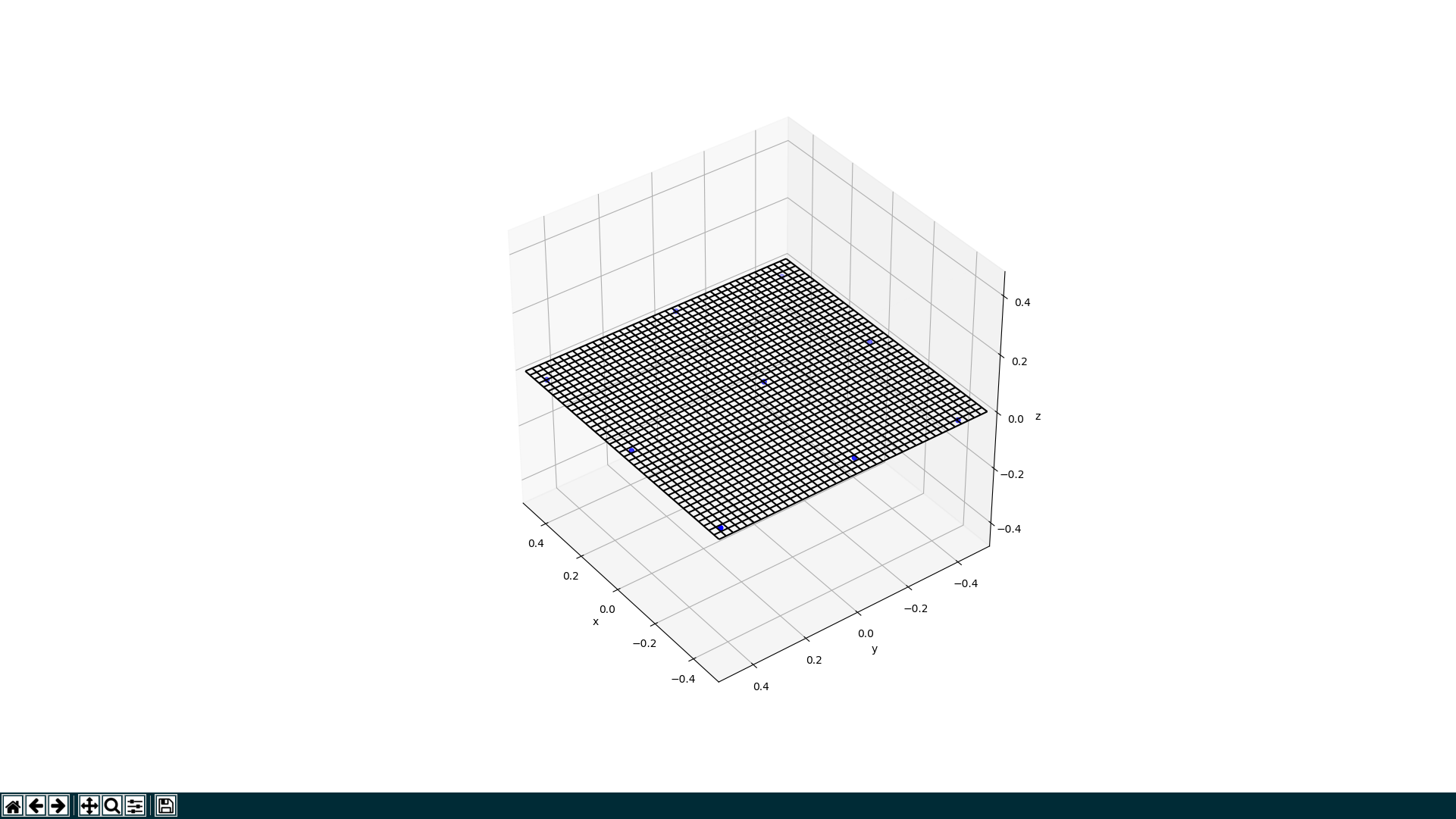
I will share the distance between points and how that aligns with the grid later when I crunch the numbers.
…don’t worry, there is more to come
…and some of it might even be properly serious ![]()
…in the meantime, keep a lookout for others posting here in the community forum about their experience with RS2.