Oh, I couldn’t do a comparison because RS2 is on v.2.18.1! ![]()
I am just kidding. We will get there ![]()
Oh, I couldn’t do a comparison because RS2 is on v.2.18.1! ![]()
I am just kidding. We will get there ![]()
I’m waiting for my RS2! I do not know when it will come? 
@Pascal_P With respect to showing errors to the millimeter, I forgot to mention that my grid is not ‘calibrated’. The spacing is 1 inch (2.54cm) and I was wanting to see how close to the hole I was getting, not now close to the mm I was getting  .
.
So, if I can figure out a way to ‘calibrate’ and my grid, plus add orientation detection to my script, then I could show the mm error. I’ll also think about whether or not I can write a disclaimer instead that is big enough to say that the published error result is inseparable from the grid error. That might be too complicated, as a lot of people probably won’t consider it when glancing at the table of error. (2¢)
It will come as soon as you stop checking your email for the tracking number. ![]()
I already have the purchase invoice but the shipping number is pending
Just curious, did you get the expedited DHL shipping (couple to a few days delivery?) or the slow boat from china shipping (weeks?)?
FedEx 5 a 7 Day
It would not take me 5 to 7 days to eat that, but definitely more than a day  Looks like a meal fit for a king
Looks like a meal fit for a king 
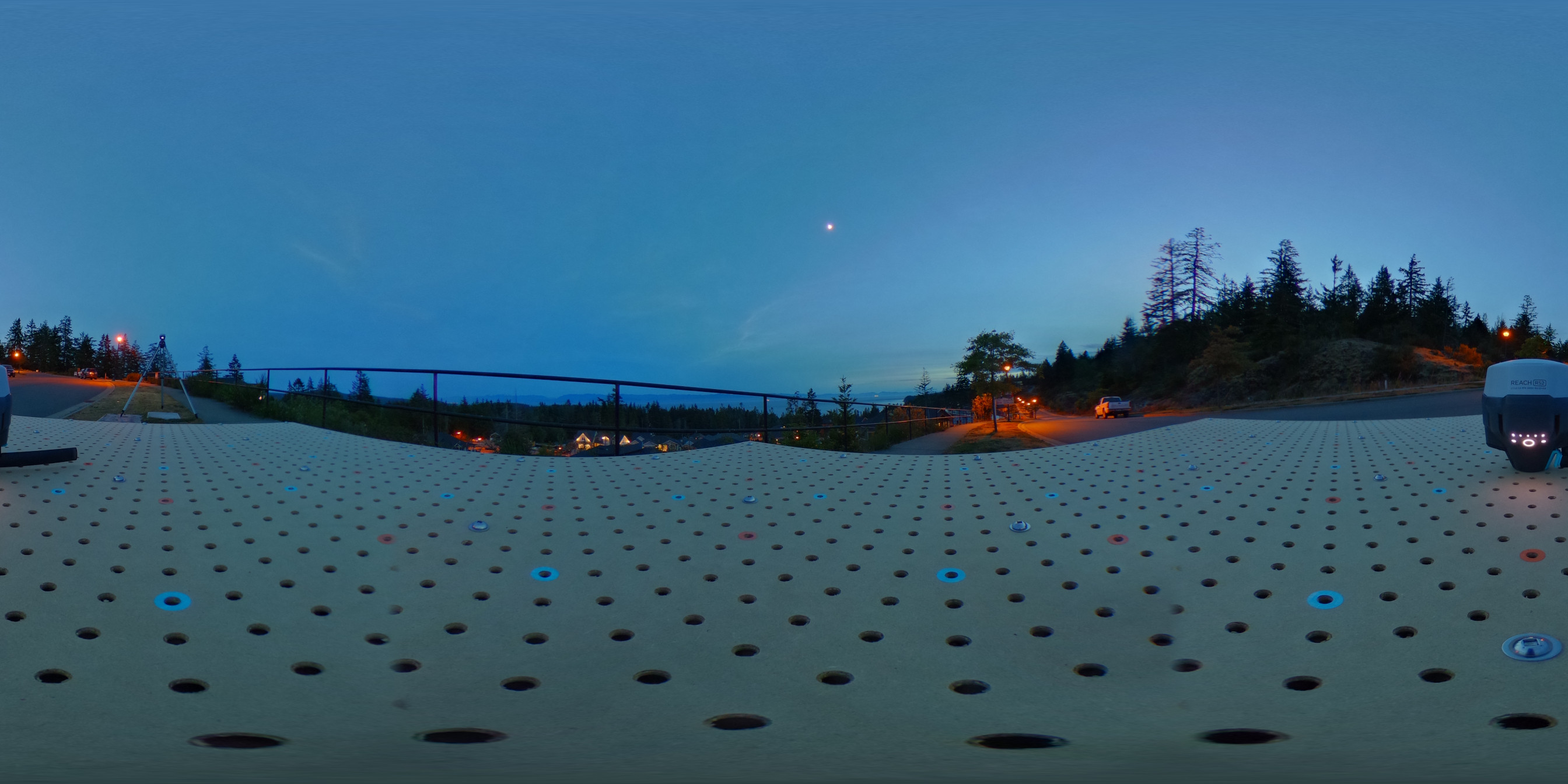
This is the site (360 pic):
Evening:
Getting dark:
There is a nice view of the ocean, and there was a great table for my grid. Too bad it had a power transformer inside for the houses nearby. It is a good low frequency EMI test, I suppose. There was quite the “HUMMMMM” noise, but at least the grid didn’t vibrate and slide off onto the ground 
Here are some screenshots showing the point collection (100 points!):
The log file is 34m:08s, or 2048 seconds from start to finish. Add the boot-up time until fix (1m:23s) and that is 2131 seconds or an average interval of 21 seconds per point from power up to power off. After moving to the next peg hole, I think I was starting the point collection too soon and before the coordinates had a chance to stabilize. It is probably good to take at least one breath after the rover has stopped before you start the next point collection.
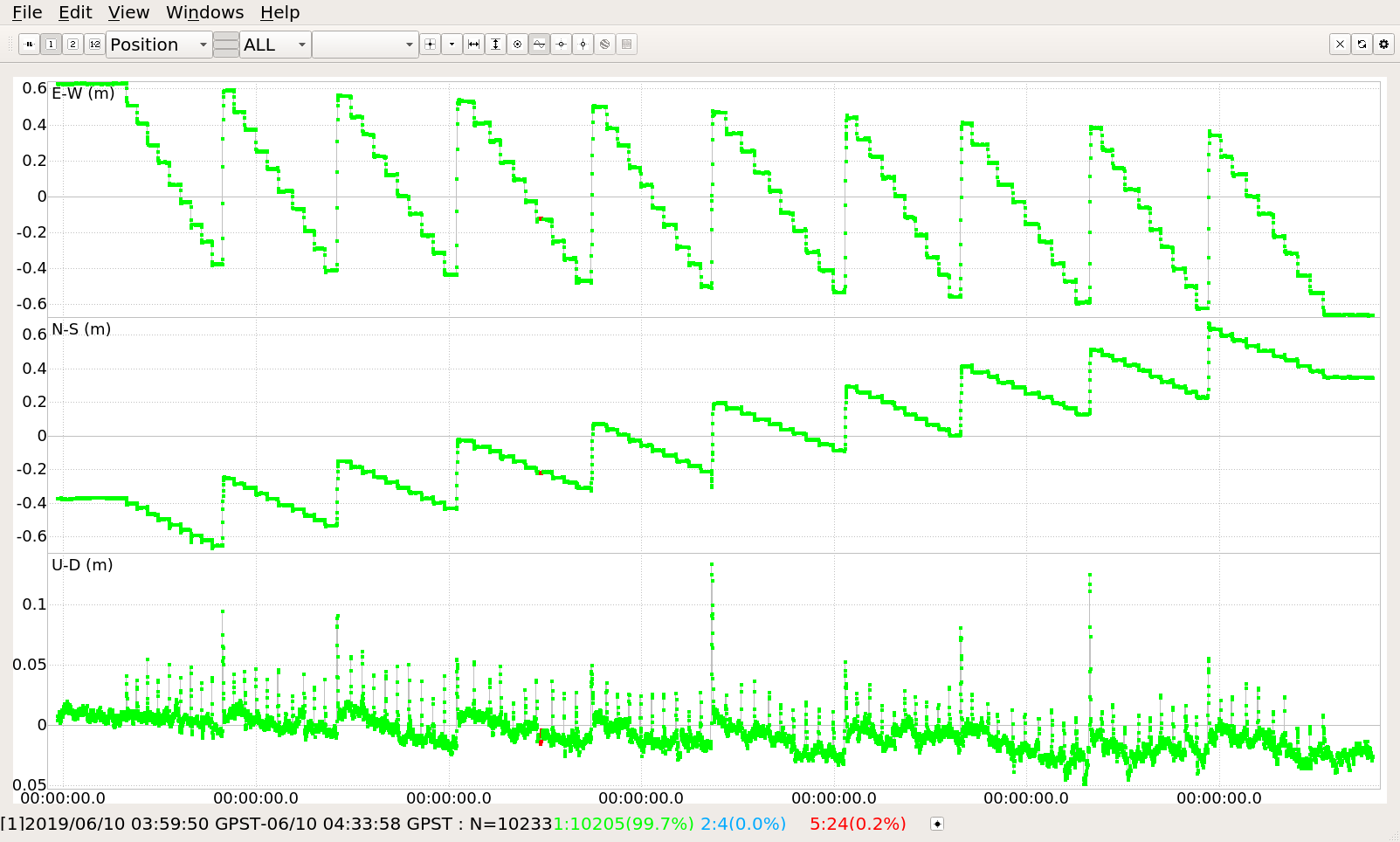
Here is the RTKPLOT position graph that shows a really nice staircase pattern:
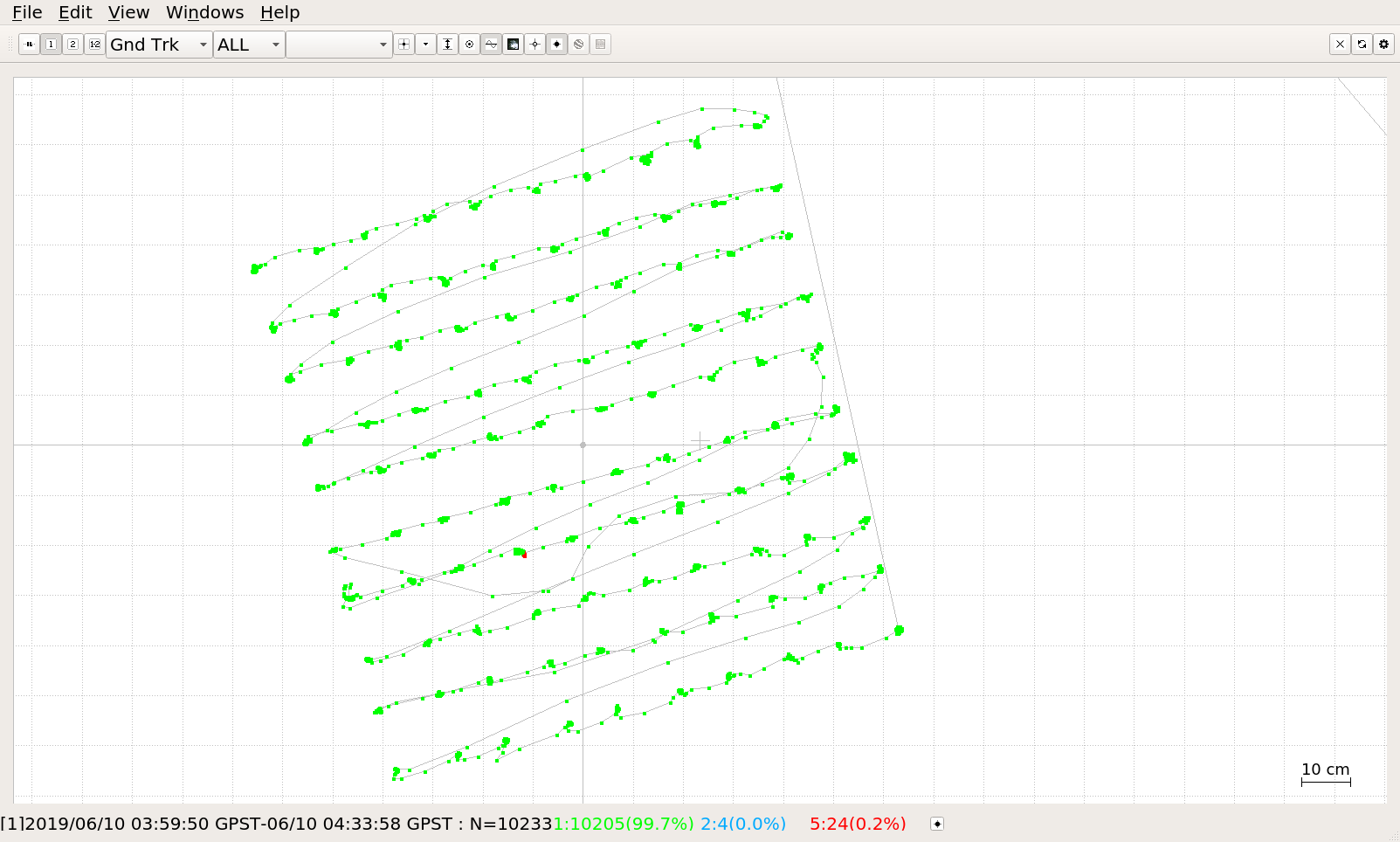
Here is the RTKPLOT ground track. You can see the one spot with some red where the fix was lost for a few seconds. I’m not sure what caused it, but the fix came back right away.
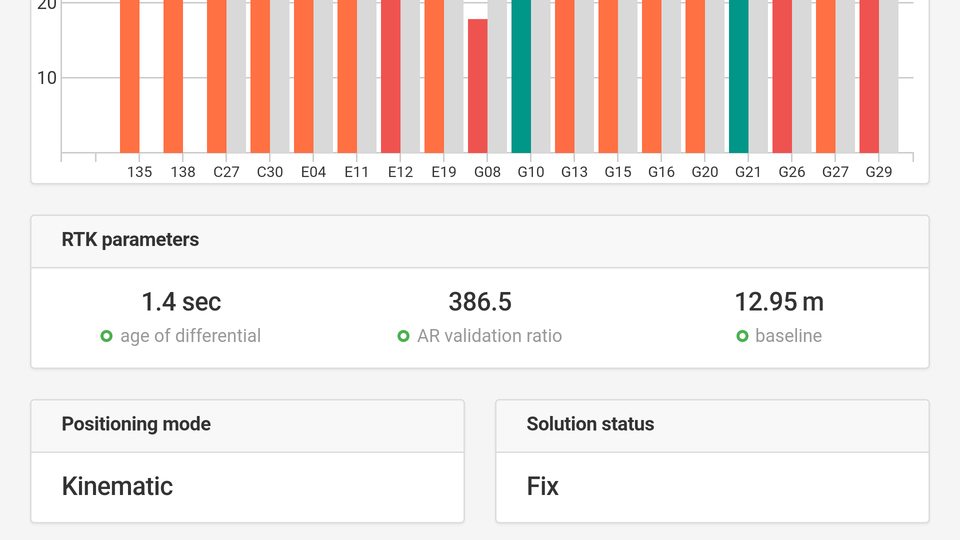
Here is the survey project output for the 100 points:
Right afterward, I rebooted the RS2 rover and collected 12 more points with a new initialization:
Here is where the error chart will be once I clean up my script. It consumed 3.6GB of memory for the 100 + 12 points and then had a hard time lining itself along the XY axis. So you’ll all have to stay in suspense until I optimize it a bit better for the larger survey projects  sorry
sorry 
For now, you can think about the average ‘lateral rms’ error that is shown in the survey project output. The average of that error was just under 2mm. Of course the raw error will be more than that, so we will wait and see what it works out to. I’ll bump this thread when I publish the table of errors.
hello @bide, your tests are wonderful, they help us all to get to know RS2 better, thanks very much. I am waiting for my RS2 to arrive after mid-July. I’m curious to see if decreasing the recording time of the point under 10 seconds remains good precision. In the surveys I do need to be very fast, in one day you can also collect 1200 points.
Can you test your RS2 with 1-2-3 seconds in RTK base-rover configuration and also with RTK ntrip? Thank you.
@vin_bro I’m glad you like the tests and I will make a note about trying shorter point collection times and also NTRIP.
Here is a little tidbit for you:
An RS+ works under partially obstructed sky and gets a good fix over LoRa from an RS2 base nearby:
The skyview of the rover is a 66 degree clear swath overhead; a building is 1m to the south, 2m taller than the antenna; and another taller building is 9m to the northeast; and a small stand of trees to the north 18m away with tops 24m above the antenna.
I had all constellations enabled on the RS+ and chose Beidou instead Glonass in this case for lack of Glonass corrections. To be fair, I did not try with Glonass enabled.
The takeaway here is that RS+ works fine with RS2 as a base. RS+, using ReachView v2.18.0 is picking up this fix using corrections from GPS, Galileo, and Beidou.
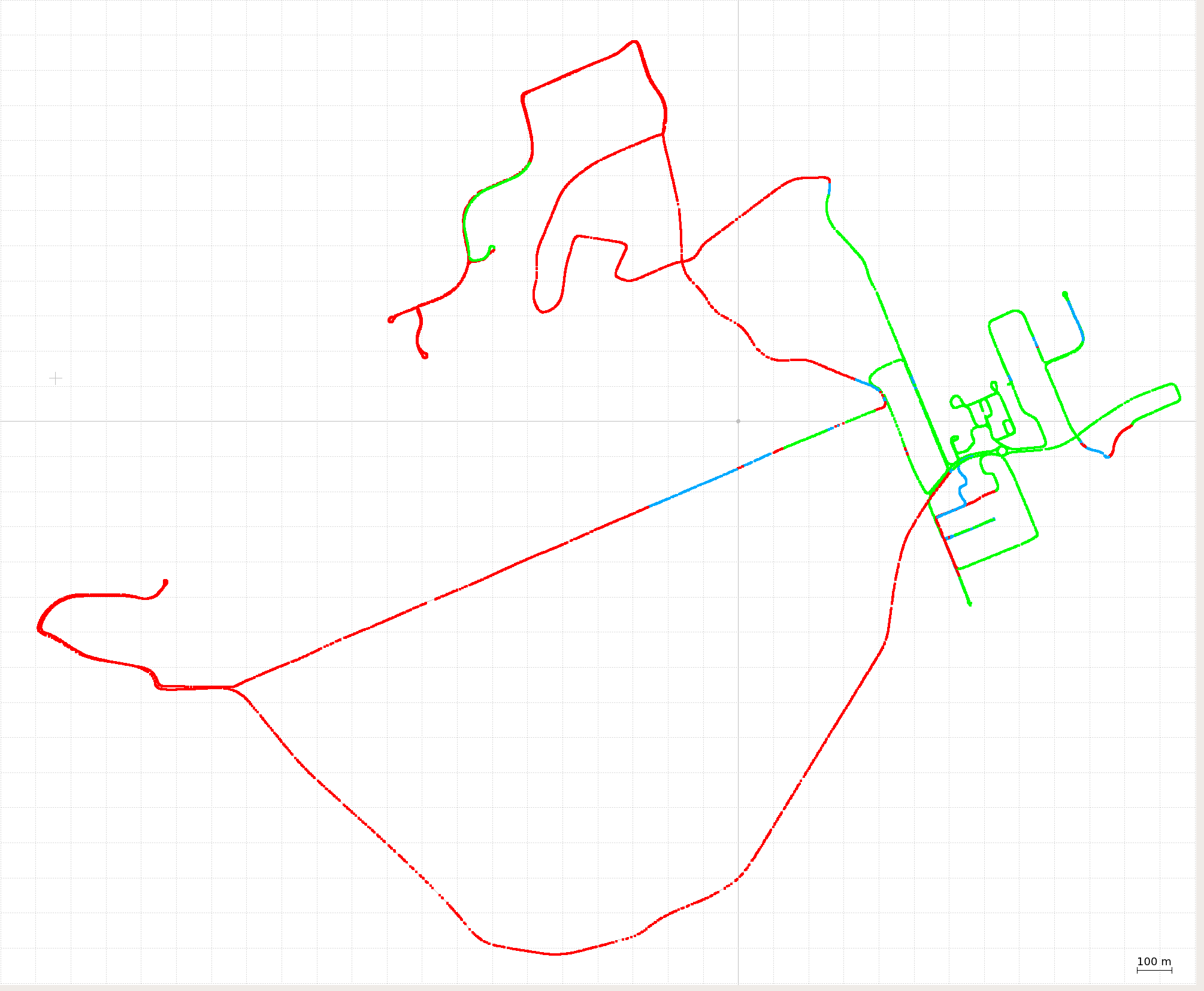
I was out testing LoRa today, so I might as well share this track log:
The RS2 base was set near the center of the green fix over on the right side. It was on the roof of a 2 storey building, but it was not the highest building in the area and not on the highest point of land either.
The RS2 rover was picking up the LoRa radio tranmission for about a 0.5km radius. The exception being the fix at 1.5km away where the rover was up on a hill and had line-of-sight to the base. In most other places there was very little opportunity to get line-of-sight. So the limiting factor here was signal blockage due to terrain or buildings. And when you have those radio reception troubles, that is when it is time to make use of the SIM card and turn on the mobile data (but not today though).
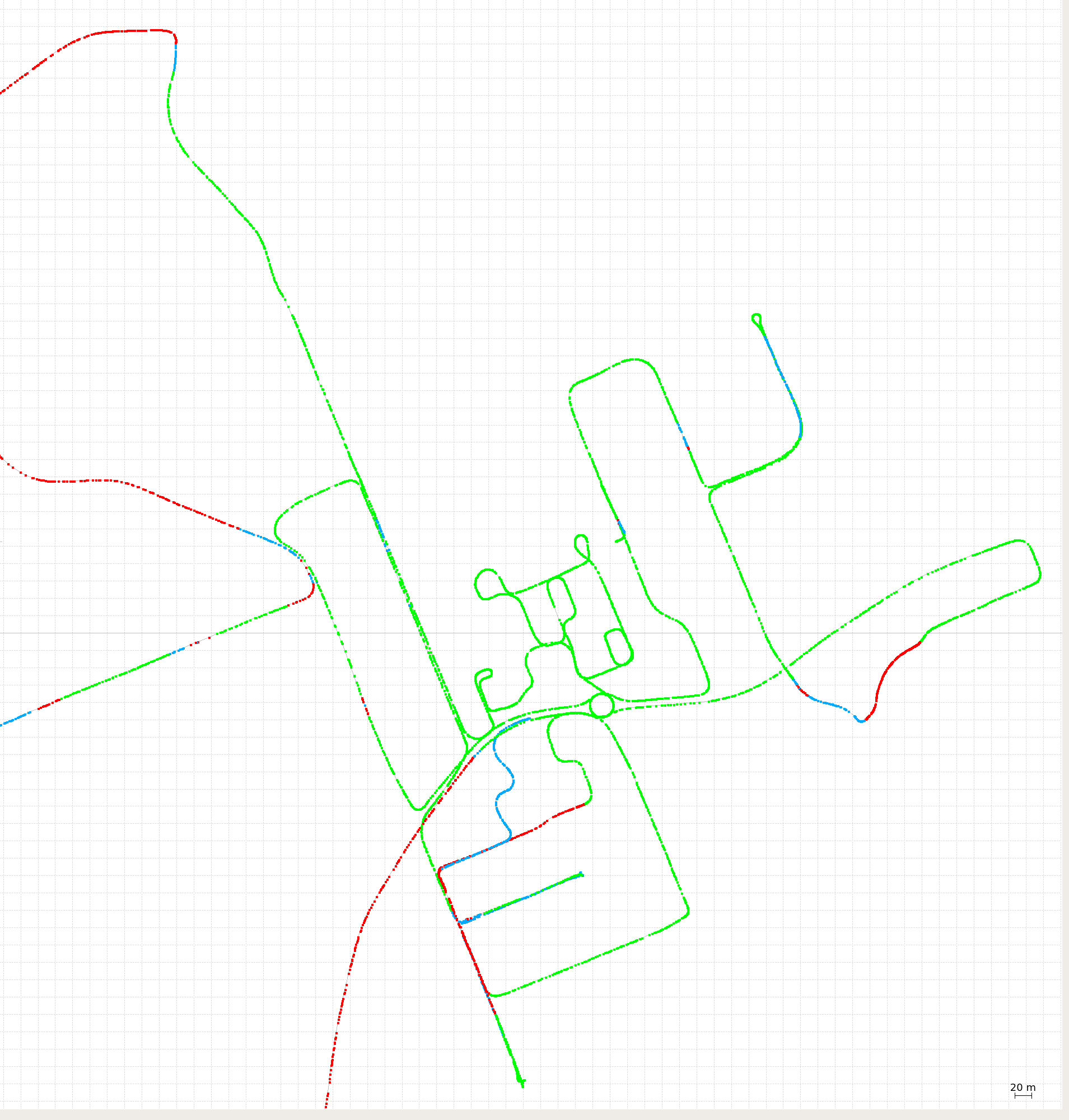
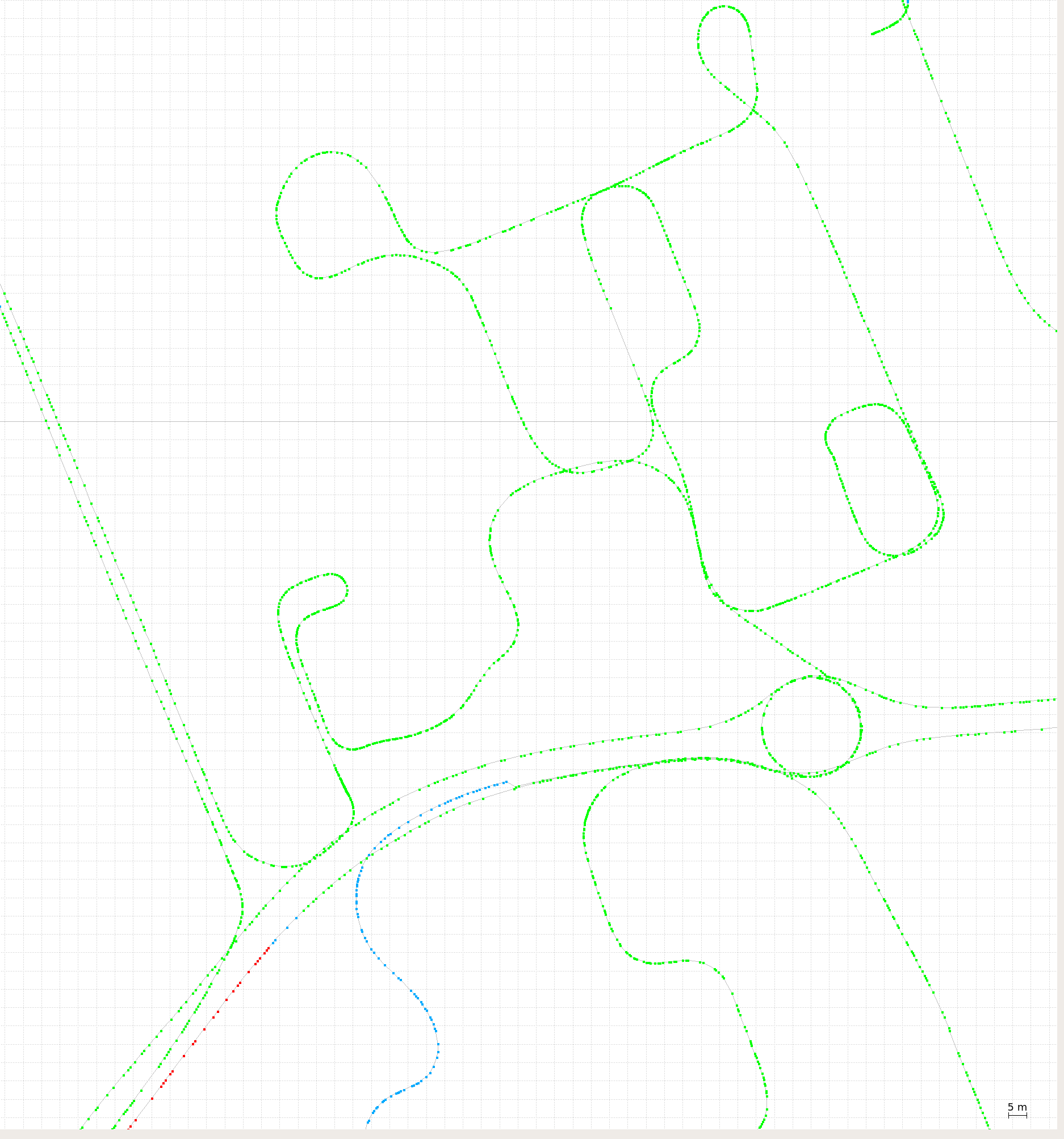
This is just a close up showing the rover going around buildings and up and down the roadway. Where the corrections are being received, there is no problem getting or holding a fix.
Here you can see the position graph. and you can see the issues with rising terrain in the bottom graph that shows the variation in height.
RS2 LoRa settings were:
RS2 RTCM3 message settings were:
The takeaway for this one is that, while LoRa works great nearby the base and wherever there is good line of sight, to have the option to turn on mobile data in ReachView, avoiding all that red single and be able to have green fix everywhere is a huge advantage for productivity.
Great work.
I wonder if its possible to have cell data enabled and LoRa set to 1.pri and when LoRa drops out for X units of time, it would swap to ntrip. Base must be able to have both Lora and Ntrip active at the same time. Or maybe connect to a different serivce. Doable?
Yes! Doable if you can write
(eye caution)
… or we make a feature request for ReachView.
It is a great idea though! 
I like it !
Accede
Did that ![]() word make any sence ?
word make any sence ?
(quick search) OK, now it does.
Ok, was trying to flex some English muscle