



I don’t have time to read every post and what I was referring to was something I recommend over a year ago. I will go look for that info.
You did respond when I mentioned it, haha. I know it’s hot in TX ! ![]()
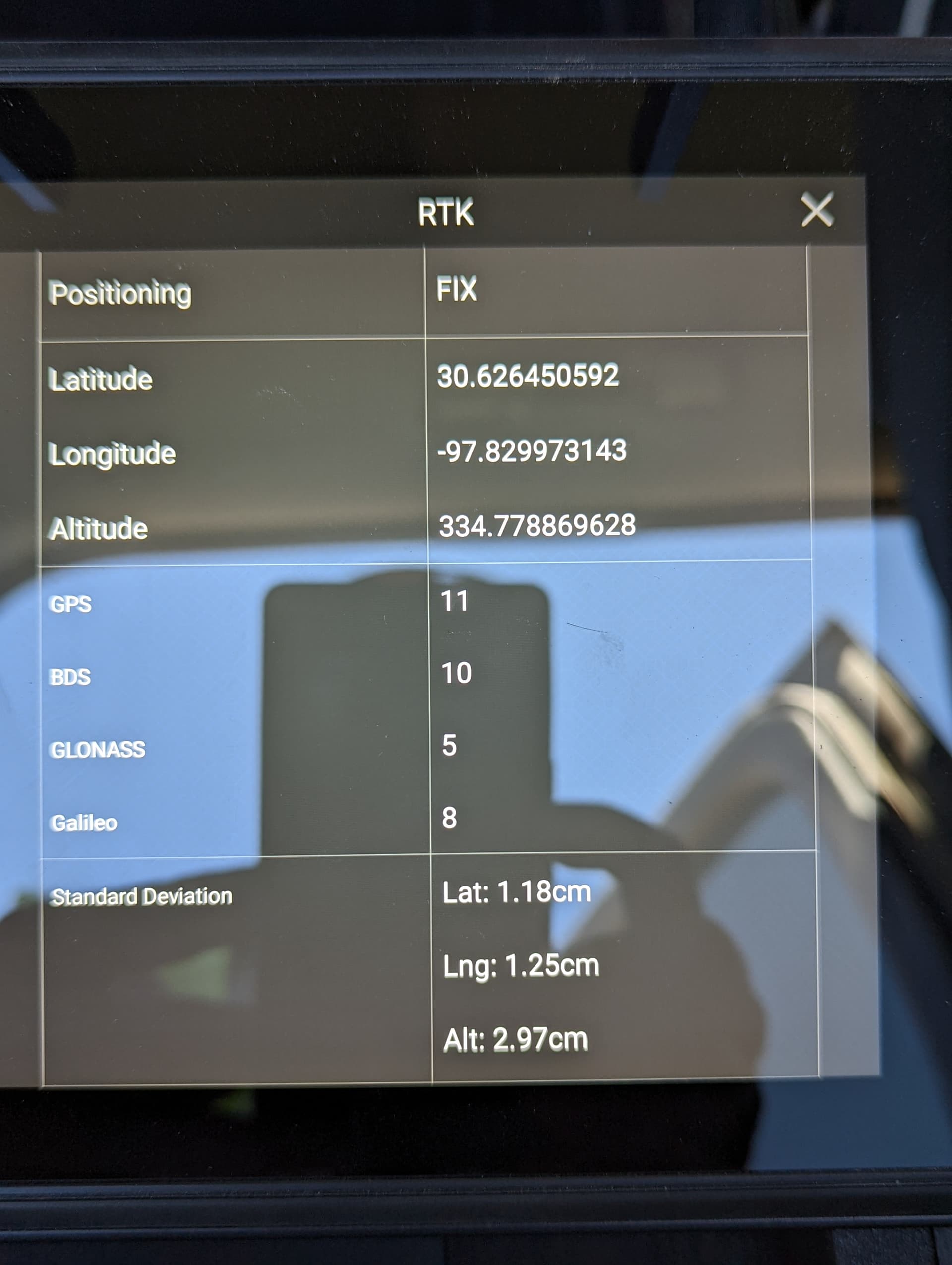
Have a look here:
2 Likes
Dude it is so bad here right now. We haven’t had rain in about 3.5 weeks and it’s been 100F for 18 of the last 21 days. We just had our first major fire of the last couple of years and water rationing started the last day it rained. Basically I believe the desert is coming for us. Having to babysit the Evo hasn’t helped. I’ve got so many messages going that I can’t remember yesterday’s flight much less a week or a month ago, lol. I recall those posts now. Thanks!
1 Like
Michael, good to see you have these great results! And if you need some help with this new feature of setting the base position, just let me know.
Hope the weather in TX will find the middle ground!
2 Likes
Workflow is coming together and this is one of the first times in a while where a piece of technology is meeting and or exceeding my expectations for our business. Our new workflow is three RTK points set for alignment. We then set up the base and average fix a point for 5 minutes. Space station is then put into local hotspot mode and the drone RC is connected. Take a screenshot of the coordinates for the base point that was collected and go. We’ve gone from 5 to 10 minutes, fixes to 5 to 10 seconds. One of the few things I need now is for studio to allow the combining of multiple battery flights. It doesn’t seem like there would be a really hard time with changing some of the header in the first session and amending it with the proceeding sessions.
Another thing I will say is that I’m getting some slightly different results from local to network to PPK, but I don’t feel that I have run it enough to make any conclusions. In order of a foot.
1 Like
Sounds fair. We need to teach Emlid Studio to combine MRK files for that. I’ll pass your request to the team.
You mean between RTK and PPK? Is it an equal error for all coordinates?
amigo, suas configurações estão equivocadas.
as informações de mountpoint estão erradas, senha e conta.
veja os tutorias da emlid com o phantom. sao as mesmas para o autel evo 2 rtk.
voce deve criar uma conta na caster.emlid.com.
o que esta faltando para voce é informação.
friend, your settings are wrong.
mountpoint information is wrong, password and account.
see emlid’s tutorials with phantom. are the same for the autel evo 2 rtk.
you must create an account at caster.emlid.com.
what you’re missing is information.
Hi @chobcy,
Thanks for your note! But I believe this issue was related to incompatibility with Autel drones, which is already fixed in the latest version of firmware. So, now everything works fine with Autel.
2 Likes
Ran local NTRIP on 29 this morning and it worked fine. I’ll be trying it again tomorrow on 29.2. I think I am getting the clue that because the Reach RS2+ is so much better with network RTK that I am going to start shooting the point for the base and then going local as my default setup. I shoot in a couple of checkpoints anyway so what’s one more point.
2 Likes
@svetlana.nikolenko.
Yes!
Thanks
How far does local NTRIP work?
Que tan lejos?
Hi Javier
Very short. It is primarily designed for standing next to the receiver with the drone remote controller which receives the corrections and then forwards them to the drone.
1 Like
You can use a network analyzer to see when the Wi-Fi connection starts to degrade (even just a little) and set the base point there. Usually ends up being about 50ft with our routers.
Yeah, it makes sense.
Hi Javier,
It’s a few meters because it depends on Wi-Fi. If you have a powerful router, it may hit a bit further. But in general, Wi-Fi connection isn’t a long-range.
Here’s what I’ve started using. Inseego Skylus 160NE. The nice thing is that it has an internal battery like a MiFi but is a fully manageable router and can have external antennas added if needed. It’s even small enough that I can put it in my vest pocket and walk around if I need to.

1 Like
This one works up to 50ft?
In the right environment it would probably go further than that. Think of it more as a home Wi-Fi router. Unfortunately in construction we’re always around a lot of metal so it just depends on where I can set up my base.
I see, nice solution!
This topic was automatically closed 100 days after the last reply. New replies are no longer allowed.