



Maybe we’ve seen each other on the autelpilots forum… Evo II Enterprise with RTK here.
HI, I’m also Just keeping the topic open. I have the same connection issues with my EVO II pro RTK to the RS2 with local NTRIP.
Hi guys,
I understand your concern, but I just want to outline that we remember this issue and are highly interested in resolving this. This is the issue we can’t solve on our own as it involves 3rd-party hardware. That’s why we’re in touch with Autel support regarding this.
All news will be posted here even if the topic happens to be closed.
5 Likes
I hope Autel/Emlid can get this figured out, I currently have the EVO II Pro and would be interested in getting a EVO II Pro RTK in the hopes of setting out a few less GCP’s when mapping.
With the new 29 beta 3 now connects to Autel Evo II Pro RTK
9 Likes
That’s awesome news, David! ![]()
We’ve added support for NTRIP v2 in this version, which did the trick. Thank you for testing!
Hope it now works for everyone in this thread. Looking for your feedback, guys.
7 Likes

I’m happy to hear that! Thanks for checking!
1 Like
Hi Svetlana,
I confirm that the connection works, tomorrow I will do a test. A thousand thanks
Ciao Svetlana,
Confermo che la connessione funziona, domani farò un test. Grazie mille
1 Like
Here is the confirmation
Great news !!! A soon as i can i’ll try !!!
This is why i love EMLID ! the awesome support !
10 Likes
Hi Antonio, Lucas,
Your kind words warm my heart! Thank you a lot.
8 Likes
But this is great!
It was time, thanks Emlid.
Hoping to please, I would like to advertise the telegram group dedicated to Autel users for photogrammetry. The group is in Italian but you can write in any language, preferably English, and if we grow up it will become the official language.
If you want to subscribe, the link is the following.
1 Like
I just did a local NTRIP test with an Evo II Pro Enterprise RTK and if I had known it was going to be that easy I would have been on it as soon as it was released. I guess it hasn’t been too long though…
We have been having a lot of problems with poor cell data in our northwest territory ever since 5G was released and NTRIP directly to the drone has been very sketchy. The RS2 rover connects within 60 seconds but the drone takes up to 8 minutes.
For the local test I shot in a fixed point for 5 minutes with my rover on NTRIP, copied the coordinate to my base and connected directly to it through the Smart Controller. Processing the small test map and with residuals showing 1-2cm so I’m excited to see what happens.
7 Likes
Yep, that’s about as good as it gets. Hopefully weather will play nice in the morning so I can run it on something with size and get some checkpoints layed out.
4 Likes
H Michael,
Your post is the best ad for this feature! Glad to know it’s come in handy ![]()
3 Likes
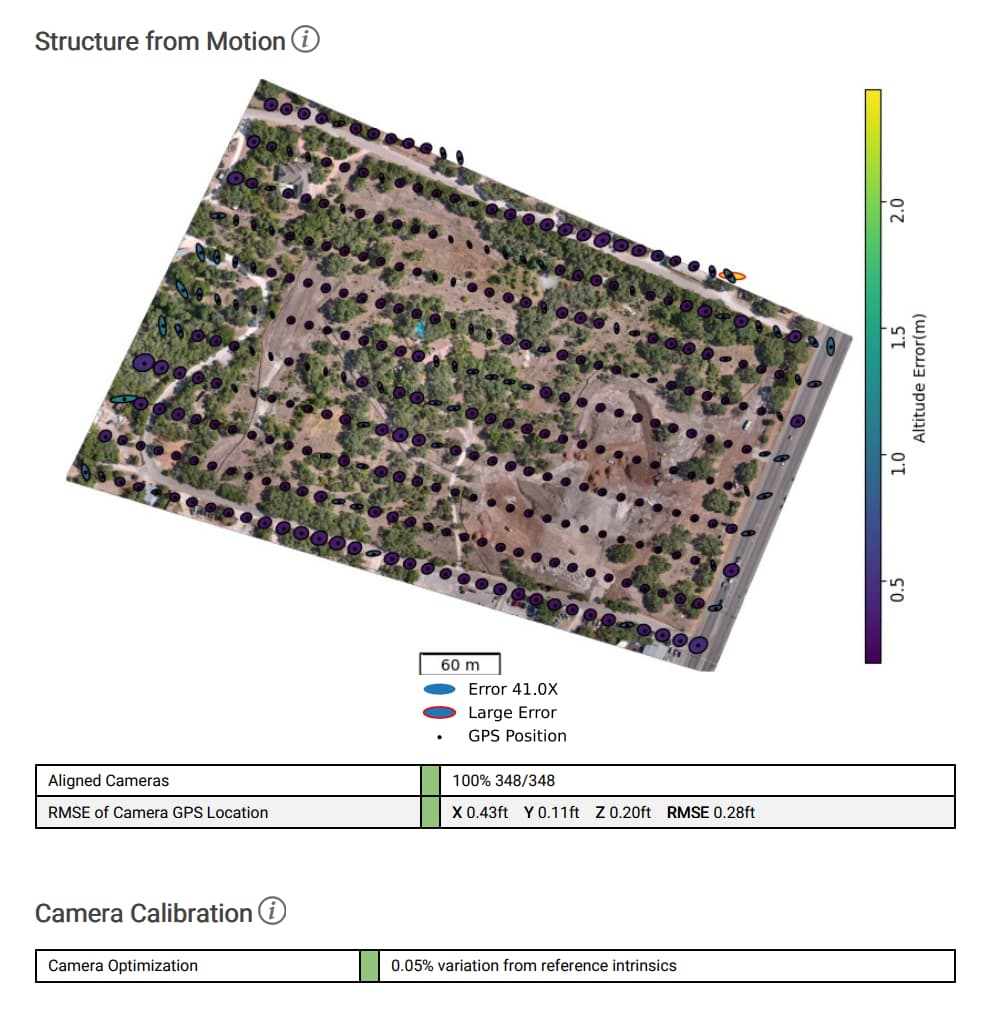
We’ve flown 9 more sites since the last update and everything is starting to come together. When I get to the bad network NTRIP areas a lot of the time I can still get an RTK fix so I can shoot the point and jump over to local NTRIP. Here’s a report from yesterday.
4 Likes
I’m pretty sure this has come up before, but one function that would make this local ntrip more efficient is the ability to assign the base to a collected point. That way you don’t have to do a whole bunch of copying and pasting or trying not to make an error on key punching. This is how the Topcon gear works.
1 Like
I just mentioned that that you can assign a collected point to be the base coordinate a couple days ago. Are you not understanding how it works? Or you need something beyond what RV3 provides?