Hmm, that looks heavy and prone to vertical vibrations
It will be quite prone to vertical vibrations on the arms, because of the profile of the Aluminum arm. A carbon square or round tube is much better suited for this purpose. Also means that less prop-wash will hit the arm, further reducing the source of vibration.
Interesting approach, but I have never seen that before, I think it would be better to implement the motor interlock option in Arducopter and your RC.
One szenario I would fear is that the switch surfes corrode with the time and the resistance will rise until the switch melts away. Had that in my car once ;-(.
I use Navio 2 with Radiolink AT9S/R9DS.
I didn’t do the autotuning. Will do today - thank you.
Reg. the switch - i will consider soldering it then; rather than plugging. Currently it is plugged into soldered connectors and removable. Good point reg. corrosion. It is normal copper that can darken. Thank you.
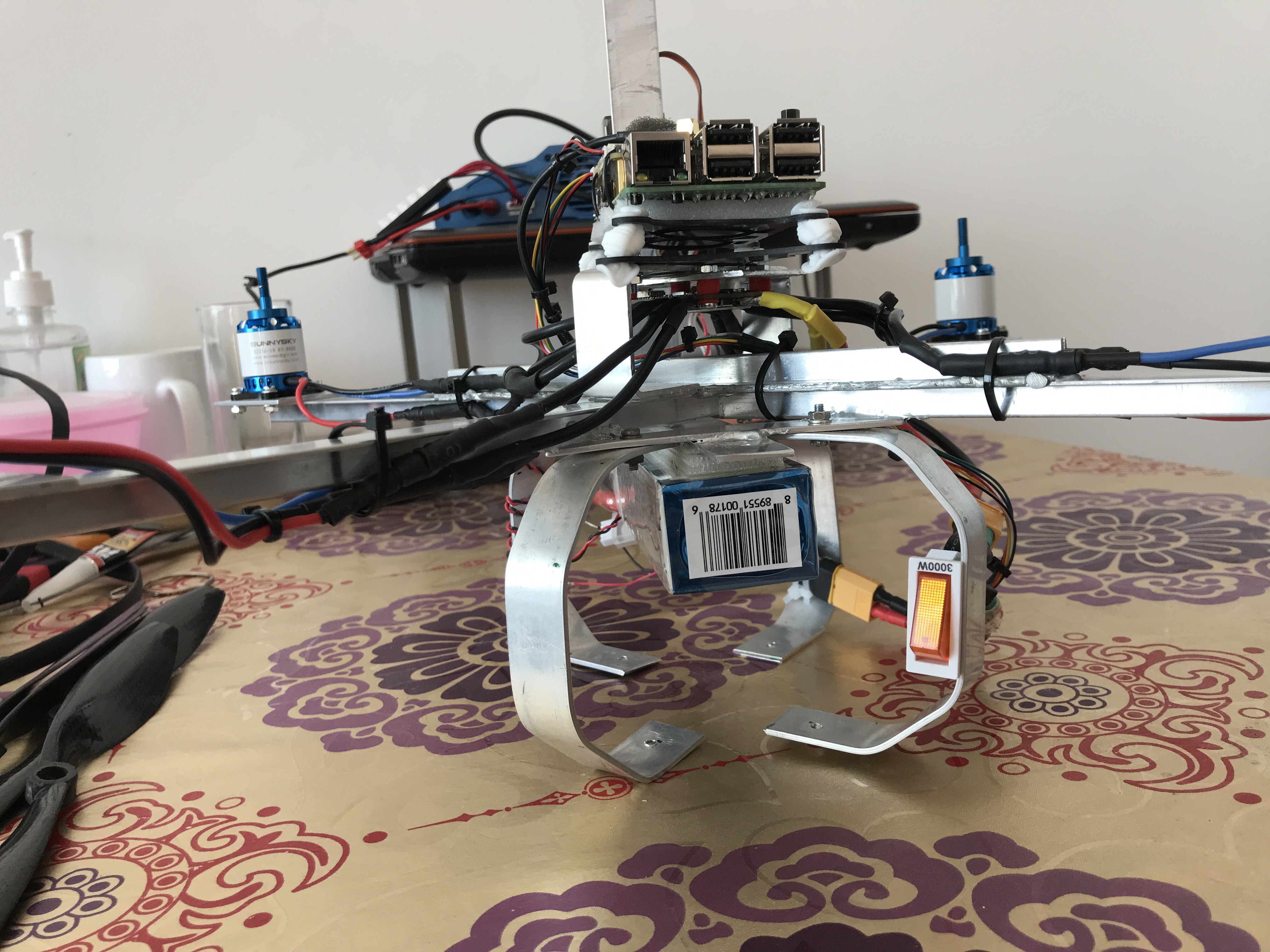
Otherwise this is really useful thing except for large size of this switch. Helps to avoid plugging XT60 all the time.
I also think that the switch could corrode inside. Actually I think it is highly unlikely that the motors will spinup without being armed. At the other hand you could accidentally arm the copter with the switch off, throttle up and then switch the switch I think that is extremely dangerous. I would not recommend to have the switch there.
And yes, I also don’t like plugging the connectors… .
Do not get me wrong, but it is a really bad idea to use flat aluminium to build a quadcopter frame. Flat material has low resistance against bending and torsion. It will be resonant on multiple frequencies.
Aluminium has a very bad bending behaviour, with a very small elastic deformation region, before it is bend permanently and then brakes. The constant vibration from the motors/props and the downwash from the prop passing over the arms will weaken the material and change the behaviour of the quadcopter.
The power switch is another thing. It does not add security. A plugged/unplugged battery is a sure thing to determine if the copter is powered or not. The switch may fail in many ways and it is not as easy to see if the copter is powered or not.
Leaving the flightcontroller powered while the ESC/Motors are not, is also not good.
Some ESCs power up if they get power through the servo plug. So the ESCs go through their normal startup and are armed, while the motors do not get power.
Depending on what you do before you flick the power switch, the ESCs might be throttled up and you get a nasty surprise.
I agree about flat aluminium. It is fully unsuitable.
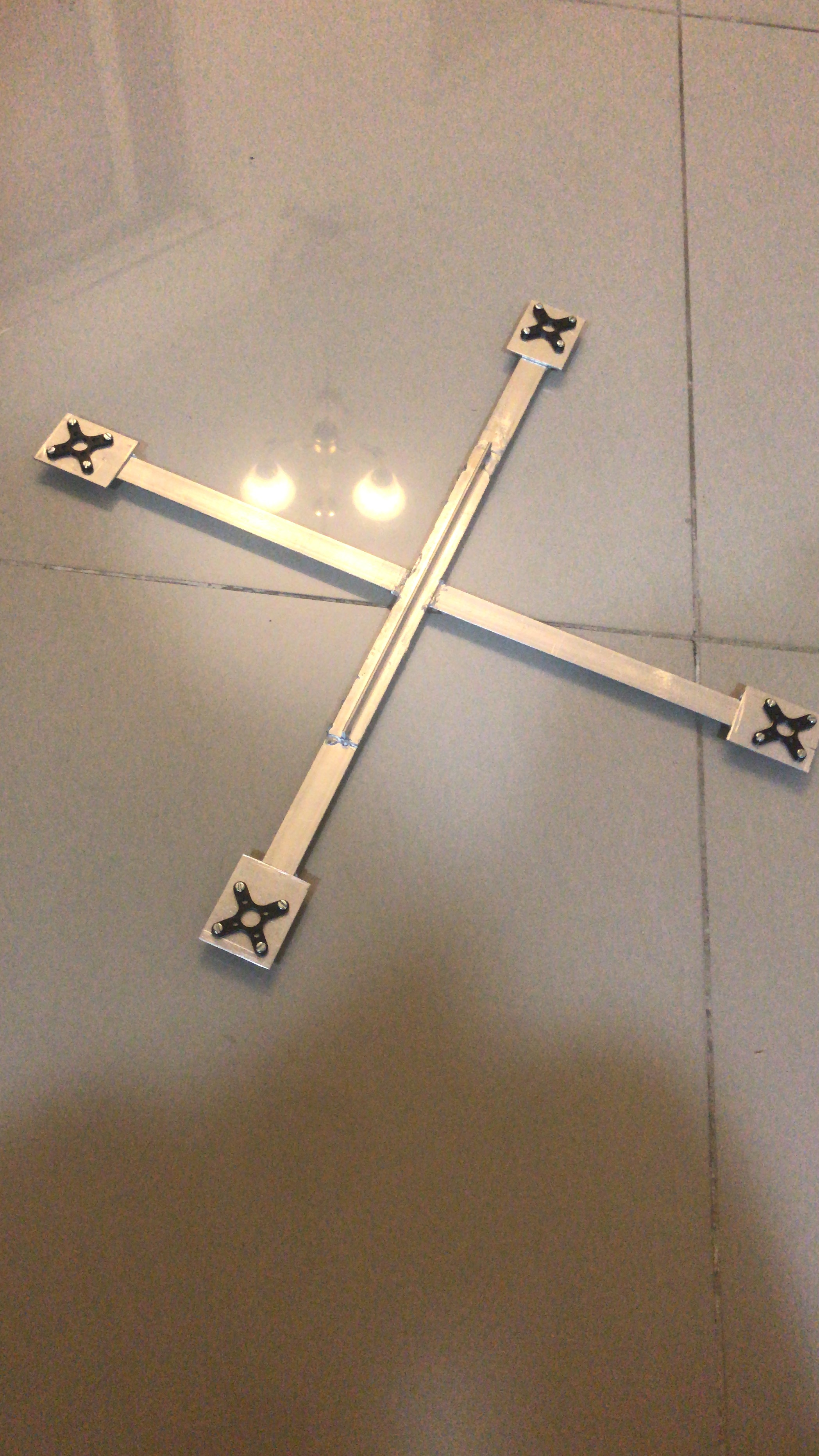
That’s why I used non-flat profile section shape.
Sorry I only now took pic with proper angle on the profile section.
There is a tricky reversed construction on the upper profile to keep all motors on the same level.
The construction is rigid so far.
However I will do test it and will tell exactly.
I am not fully sure it is successful yet.
The main issue is deformation. The aluminium is soft, and it tends to deform even in rigid modules.
I will update.
Reg. switch - it’s mainly for convinience, not for security. But thanks for explaining about ESC surprise thing - this is fully valid risk.
Why didn’t you use 10mm aluminum square tubes? If you can weld them together with two aluminum plates you could get a rigid and light platform. But 250g is already very light fur such a sturdy construction.







 I think that is extremely dangerous. I would not recommend to have the switch there.
I think that is extremely dangerous. I would not recommend to have the switch there.