yes, i liked that this locking tape is easily detachable and holds battery in all axis.
I’d like to use square profile! I cant find it yet neither online nor here in physical stores. I looked in many material stores and hardwate shops:( The one used in my build shape was more of experiment and a forced selection.
I already can notice non-elastic rotary deformation in both single side and double-side arms are possible.
Make sure you order cheap and strong one.
There are many options. When I’m hope I will take picture of mine package. its 20$ for 3 meters i think. More cheaper.
You are going for a very heavy build… . Want do you want to do with the copter?
I try to reduce the weight every single part to get more flight time. Every 10 g I save really satisfies me My impact absorbing landing legs consits of a a part which is bended by a fishing line. That works very well and is very light.
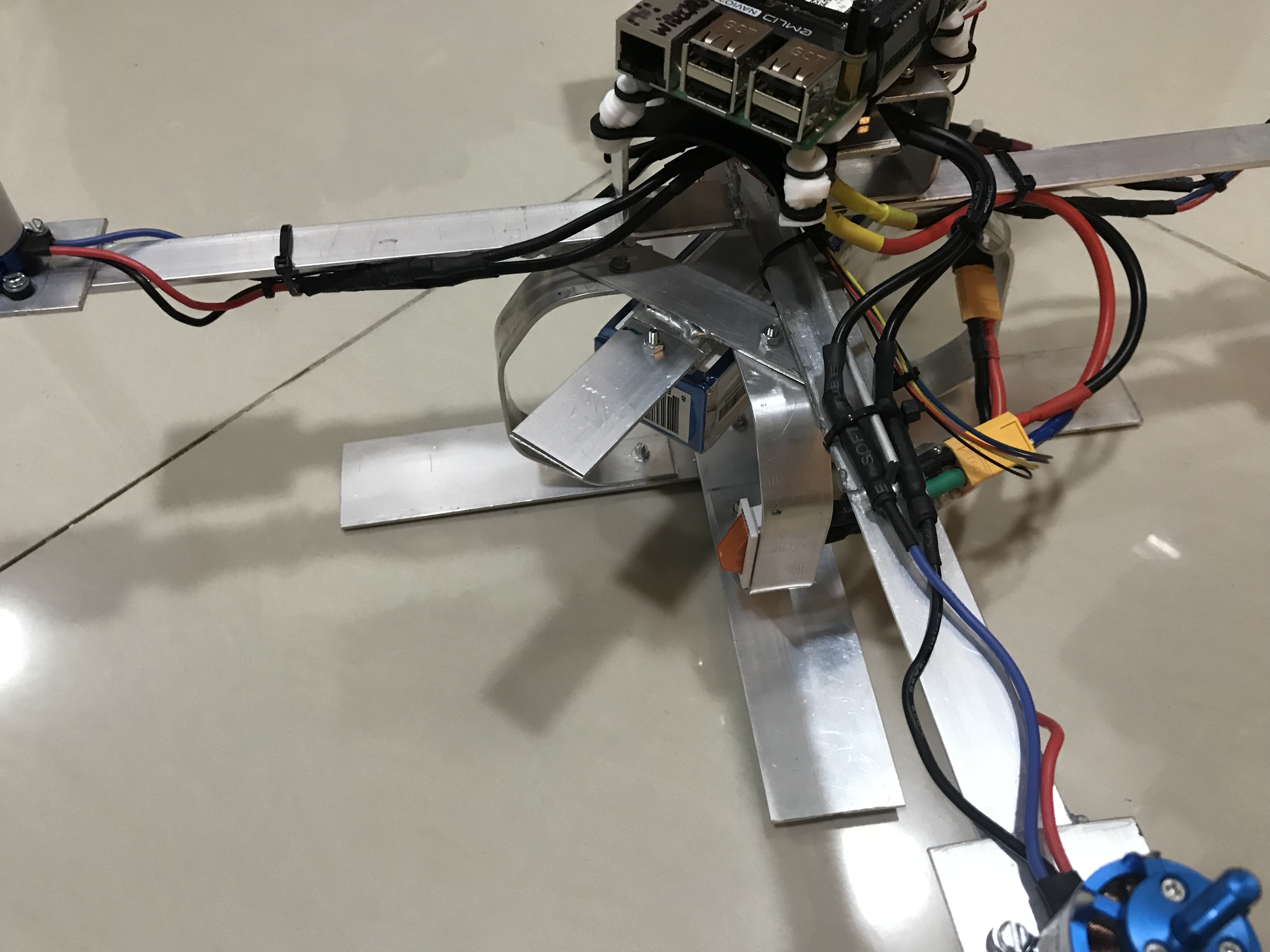
Unfortunatly I only have this very bad image since the copter needs some rebuild effort I did it in wood and will now switch to 3d printed parts. Anyhow, the wood thing has mapped 1,750 ha last year.
The copter is lying upside down and in the right corner there is the part of the leg which is touching the ground. I habe tried different legs (diy and ready made ones) and I think these are the best ones I ever had. Very rigid, very light and very impact absorbing… . I use pusher motors so I need 20 cm high legs.
In the upper left part you can see a Mauch power module which is an excellent hall sensor based power module.
I need to tune controls as there is something wrong with rotation of axis of transmitter control, maybe because of Easy flight mode enabled, and to calibrate voltage sensor.
A well balanced copter should have allocated 1/3 of its weight to the battery, 1/3 to the mainbody etc. and 1/3 to the payload.
My copter’s weight is about 2,200 g. 750 g for the battery, 550 g for the camera, gimbal and Reach RTK module, 500 g for the motors and ESCs (should be less) and 400 g for the frame and the electronics. In summer I can fly for 28 min with still 15 to 20% battery capacity left. The copter can also work under very windy conditions. I think that is not a very well designed copter, I guess one could reach 40 to 45 min if you take more care about the components but that might sacrifice some of the abilities to withstand wind.
I think you will have to save some weight or add more battery capacity if you have enough power. I think you should look for the thrust your motor prop combination can produce. https://www.ecalc.ch offers a nice calculator to get an impression about your setup. The calculator is not perfect but provides valuable hints. Maybe someone knows a better calculator?




 My impact absorbing landing legs consits of a a part which is bended by a fishing line. That works very well and is very light.
My impact absorbing landing legs consits of a a part which is bended by a fishing line. That works very well and is very light. I did it in wood and will now switch to 3d printed parts. Anyhow, the wood thing has mapped 1,750 ha last year.
I did it in wood and will now switch to 3d printed parts. Anyhow, the wood thing has mapped 1,750 ha last year.


