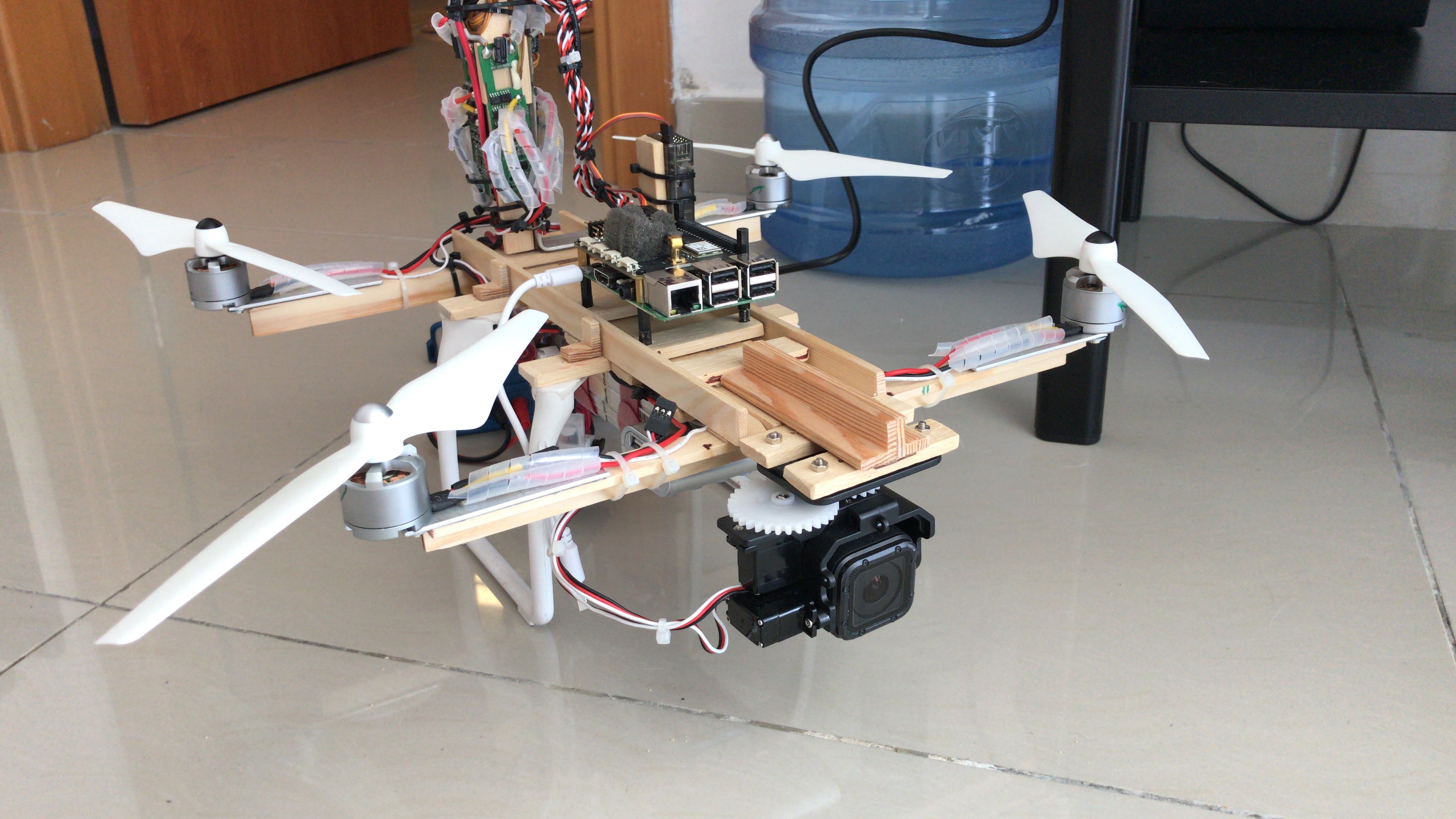
Project name: Spruce Goose
v1.0.0
Maiden flight: 26-01-2019
Status: flyable with some issues and nice innovations
I finally got time to build my drone project.
It is distinctive because I made frame for it myself using wood and some aluminium.
- I bought some old project DJI Phantom 1 used with Naza before.
- Fully dismantled and kept only 4 DJI ESCs and 4 920kv motors.
All other components like PDB are not needed.
I cut all wires as well.
Tip: keep ESC wires long. Motor wires dont matter so much.
3) I bought sprouce L-shape wood and l-shape wood and aluminium bars in local hardware store
4) I tried fixing DF13 of Navio2 power module but its useless, so I powered Pi via compact USB power bank and servo rail (powered via another smaller power bank). I placed voltage reader display for visual control of voltage. When I find DF13 I will connect it also.
5) I used 30A AC switch - I cut VCC wire of Power Module (the ESC side, not battery side!) - to switch off motors separately from 5v output. (now I am thinking - does Power Module drain power from LiPo itself??)
I soldered crimp connectors into the cut VCC wire and just plugged the switch. I will ulpoad pics of this next days. This is remarkably useful feature of this project.
6) I used strong gel double side tape (transparent) to assemble frame and mount all flat surface components. In next iteration will replace it with screws in few places (landing gear) and reinforce where needed (GPS/ESC “tower”)
7) Another distinction is that I did not place ESCs near motors on the frame. Instead I mounted ESCs vertically on GPS holder bar. This actually helped to centralize most of the wiring, although complicated connections.
Still insure if it produces too much drag… Seems so during the wind.
8) I used nice Servo extenders for tidy ESC wiring
9) Servo rail is powered using separate small USB power bank - this is one of nice ideas IMHO
10) Pi is powered using larger power bank
11) LiPo is mounted using strong detacheable mounting strips + 2 LiPo straps. Will post pics later - holds great and easy removable.
12) LiPo 3S 5500mAh
Dont try NiMH as it is 2S (ESC wont arm). Combining 2 NiMH provides questionable discharge rate (internal impedence). So just use LiPo.
13) I put Raspberry Pi into AP (access point) mode - it provides WiFi - excellent accessibility.
Used Mission Planner at home and QGroundControl on IPhone on field.
14) Dont solder motors before you check their rotation. Impossible to fix programmatically.
15) Radio is Radiolink R9DS, worked perfectly using SBUS (however the components quality is very cheap). Throttle is reversed.
16) DJI Phantom 1 ESCs do not require ESC calibration. To arm drone just disable all checks in Mission Planner (prearm) and hold throttle down right for 5 seconds.
17) Using Power Module overall is optional. It only provides power and voltage measurement to Pi.
Todo:
I still need to fix vibration dampening for Pi and camera.
Wisdom gained: there is stable software Ardupilot supporting mature protocols such as Mavlink. It is stable and advanced Open Source software, reliable.
Frontends such as Mission Planner just provide the GUI for Ardupilot. They are not part of drone control in real time.
Last thought: there must be miscalculation of wire specs somewhere far in the past. Such thick wires are not needed for 920kv motors and ESCs.
Video: