OK, I have seen that elsewhere too. But I ran into trouble at high rates for reasons I don’t understand. This might turn into a matrix of testing to wring out what is best for me.
Although I was expecting that, for some reason, I have not found it to be true. When I was establishing my exact base coordinates, I had to use a monument that is 2-3km away. The radio had to go through my house, through a hardwood forest (oaks, maples, walnuts, and wild cherries), across a large farm field, through a small subdivision, and across another field. I fully expected it to fail but had to try. My fallback plan was to shoot along the highway to establish a temporary base and then up to the house. But it worked first crack - albeit probably with the 6" wander error we have been discussing here. I cannot explain this but am thrilled with it.
I’ll try using higher baud rates with the fewer constellations I am using now. It would be nice to see Emlid publish some limits on the inter-relationship between baud rate, updates, correction rate, etc. Frankly, it all seems weird to me. With processor speeds like those commonly available today, I would have thought that 112,000 baud would be like a week long nap between bits for the system.
Off topic, but just curious… can Field Navigator or the like do corn mazes? Wonder how detailed if so? Would be nice if could import vector paths to follow for elaborate work. I.e. .eps, .svg, .dxf, .shp, .json, etc. I know their are converters and ways to deal with the vector curve line work, but the app or software to pull these in for a gnss guided mobile wheeled rover/drone etc is what I am not finding. Just seems very simple limited flight path capable? I.e. rows on a field. I need something that can input hundreds or even a thousand or so wayfinder points versus just a couple digits of them. Or can even do arcs and curves in addition to line segments.
PS, glad you got your wandering fix problem solved… Emlid products are great! ; )
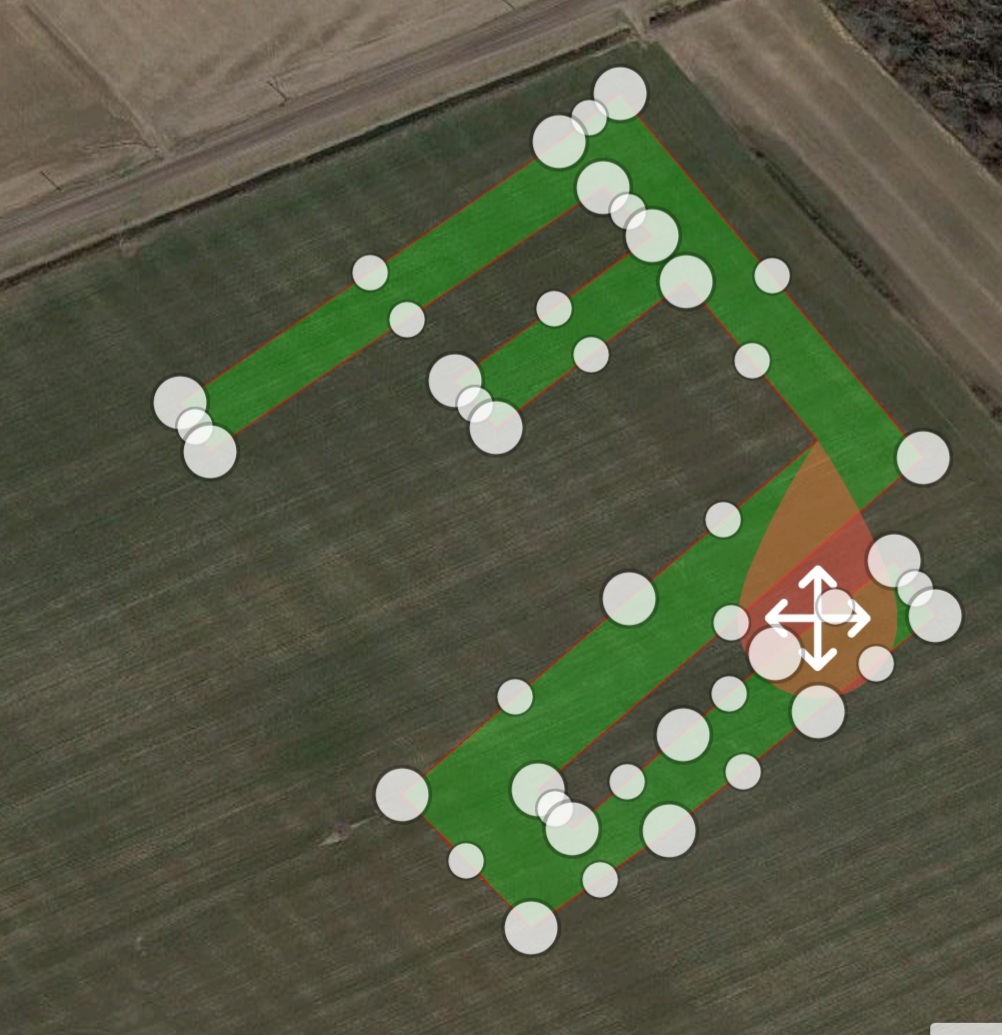
But I think it should be easy to do. Instead of thinking of a path within a field, think of the path as though it IS THE FIELD. You can create your field using manual methods or by importing coordinates. Just make your field the usual way and then draw your maze within that field. The first field isn’t really that important. It only serves as an outline for you. The inside field is the one you need. Just spray or mow it in the usual way. Sounds like a fun project!
Edit - It is prolly important to set the impliment width to the maze path width and set the tractor to impliment length to zero so your corners work out properly. Also, most of the Ag programs that I have looked at will allow the user to import fields. The authors probably never imagined a use like that, but I can’t see why it wouldn’t work.
Here is a quick concept test during and after field creation.
I’ve been looking for low ripple usb power supplies to provide the power to my rover M2 from the tractor. There are lots of choices but I have not been able to find anything claiming low ripple. I believe this is important. Where did you get the low ripple usb power supply you mentioned and what model is it?
for 12V to 5V buck converters and usb power supplies off Ali are usually pretty good.
Most ripple is stepping down from 120 to 24, 12, or 5v. Then I use instrument power supplies that I get out of old industrial PLC equipment before landfill. The Weidmuller and Phoenix power supplies are pretty pricey but the output is like a battery on the oscilloscope.
A cheaper alternative is power supplies for external hard drives, you will see on the adapter “for computer use” or something to that effect. they are dead flat too. I have some from old sea gate 3.5" externals.
In my case, I am looking for a 12v to 5v converter for the tractors. I’m not sure how they are made these days. They used to be shunt supplies in my day. That would have no Ripple at all but be very inefficient and get quite hot. I’ve been contemplating just making one cuz I don’t care about the efficiency or the heat. But if the regular 5V adapter blocks work, no need to re-invent the wheel.
I like your analogy of flat as a battery. Excellent visualization. LOL!
I also like your idea to use an external drive supply for 120 to 5. I’ve got a bunch of those laying around too.
What are the main requirements for the guidance app? The lightbar is a toolbar, right? What tools are needed at first? I want to sort it out since it sounds like a feature request
Instead of tractors, etc, can this be used with other types of machine control such as small robotic wheeled rovers for other uses besides agriculture?
Wow, thats a big request. I would be thrilled to help in any way that I can.
The so-called light-bar is not a toolbar. It’s a term that goes back to the time when display screens were not available. The lightbar is basically a screen display of pseudo LEDs across the top of the screen. The LEDs provide a quick way for the user to see how far off track they are from a guidance line. The more LEDs that are lit up, the further off track you are.
If you want to see how Programs like this work, try Field Navigator or Field Bee or AgOpen GPS.
In my opinion, Field Navigator is the easiest to use. Fieldbee is complicated and doesn’t do what you expect it to do. I have not used AgOpen yet but I did look at an overview and felt that it was a little over my head.
I’m especially disappointed with Fieldbee. The premium version costs $ and doesn’t work as well as Field Navigator. Plus getting help has not been fruitful.
So, it’s about time I gave AgOpen a try. Does it have to be a windows tablet? Can I use an android tablet instead?
Yes dave is correct, its only on Windows. But the bonus is you can watch Netflix PIP while you are on the straightaway.
AOG has features Deere, trimble, and topcon do not have yet. Since it is coded by farmers, and farming enthusiasts, there is a tremendous upside to future functionality. The group is currently working on preassembled guidance hardware to make it more accessible to more users.