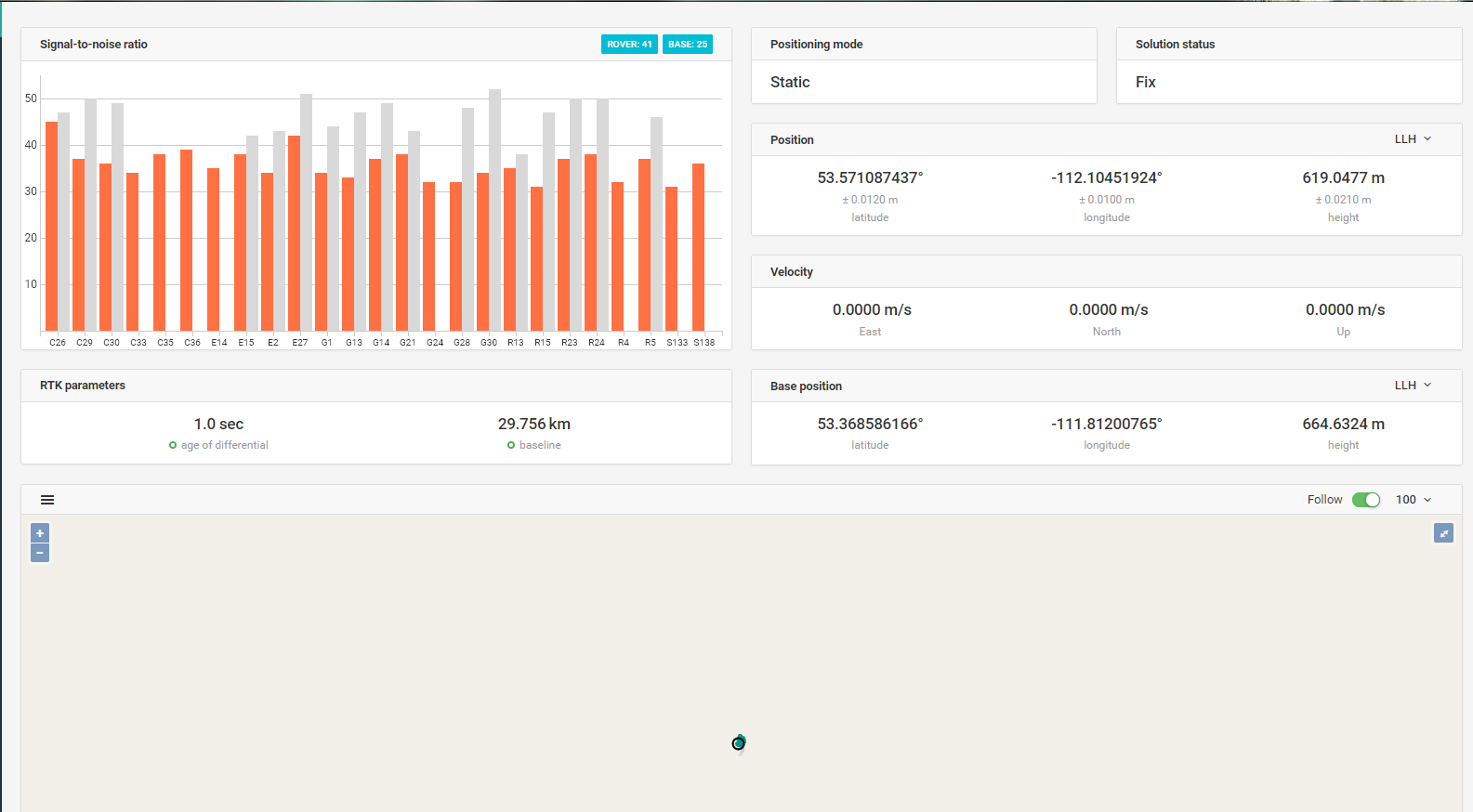
I’ve been busy setting up and testing my M2 system. I noticed something very strange yesterday. Even though my Rover has a very solid fix that never leaves lock status, and even though both units are solidly mounted and do not move, the status location of the rover seems to wander around. The base coordinates NEVER change because they were measured and plugged in manually.
I set the number of points to 1000 and then let the system run all afternoon just sitting there. By the time the dust settled, the error spread had grown to about 15 cm or 6 inches. That’s a VERY LONG WAYS FROM the 1cm I was expecting.
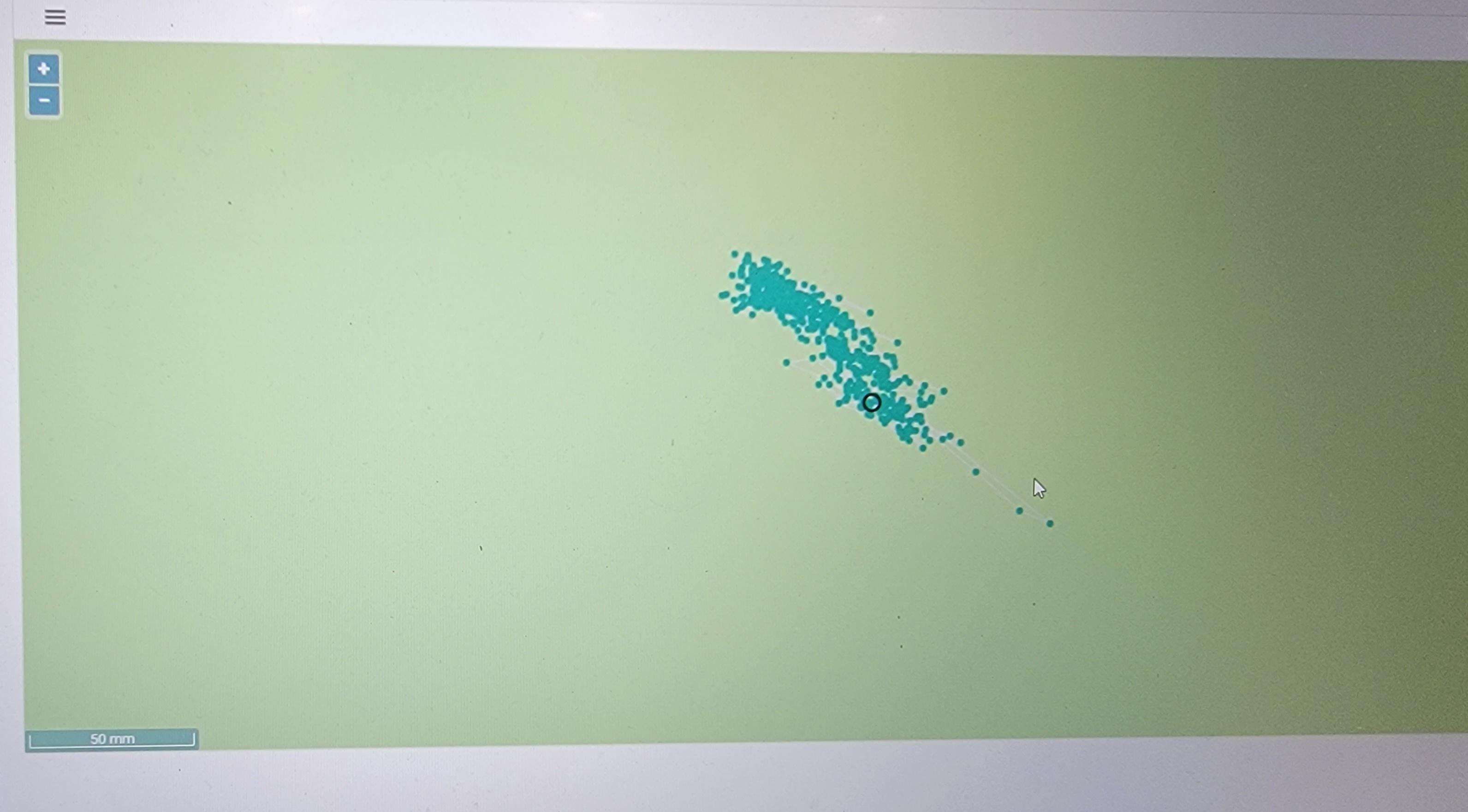
Frankly, I thought that was quite unreasonable given how close together the units are and how solidly placed they are. It’s certainly nowhere near the expected 1cm accuracy I expected from an RTK system. Then I wondered… Is it possible that this is a map of the uncorrected readings for the afternoon? If so, that performance would be AWESOME!
That thought got me to wondering some more. I’ve noticed that the web portal screen readings for the rover wander around quite a bit even when a solid RTK fix is achieved. Is it possible that these status readings are also uncorrected?
If the status screen location on the rover is uncorrected, then my base calibration is wrong too. I used the readings on the status screen to find the error for the monument location and then used that error to correct my base location. But now I’m thinking that the status screen might be displaying the uncorrected location, not the corrected location. So my base location could be wrong too! Not a big deal for precision, but not Great for accuracy.
So, which is it? Is my 1cm precision all messed up, or is the status screen displaying the uncorrected coordinates?
If the accuracy is messed up, how do I fix it?
If the status screen location is uncorrected, how do I get corrected coordinates?
Assuming my suspicions are valid and the coordinates are uncorrecred, how the heck do I get the corrected location to 9 digits? Do I really have to create a log to download and look at later? That seems rather silly. One should be able to get a corrected location on the spot.
Note to Emlid - regardless of what it really is now, consider displaying both uncorrected and corrected coordinates on the status screen. This would eliminate the ambiguity and confusion as well as be very useful during setup. Heck, I would also consider displaying the difference.