Regarding to use antenna plate:
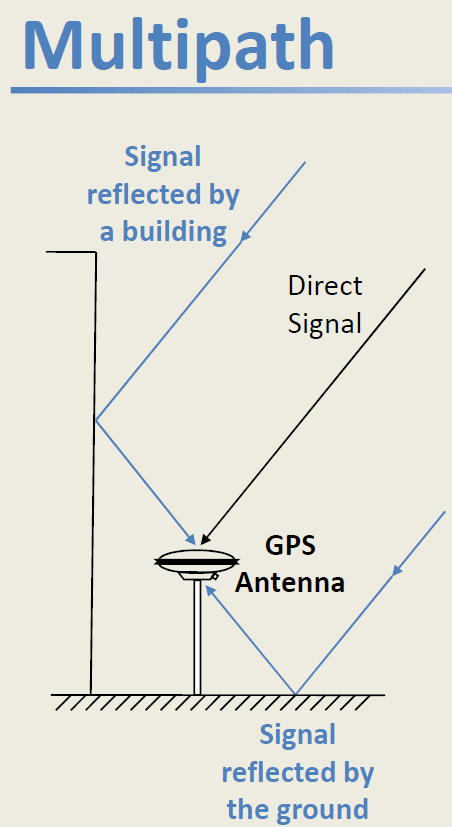
In my opinion, when measuring under a canopy of trees, the plate under the antenna should not be used. In this situation, it is important to rule out the multipath caused by the reflections from this plate. Such a plate reduces the accuracy of PCV (Phase Centre Variation). Here it is important that the accuracy of the phase centre is as high as possible (minimum 2mm 1 sigma).
And of course, the most important thing is to raise the antenna as high as possible. I use a 5m surveying telescope pole.
Yesterday, the checkpoint was the bench mark 2 class of precision leveling in the forest.
Wonder if using a balloon for lift far above canopy (attached / tethered to a custom plastic mount below the Reach RS) providing balloon several meters above the Reach RS to get minimal satellite view blockage directly about unit.
Then also attached to the same custom plastic mount, (4) thin braided cables splayed and anchored to ground equally and exactly as needed to provide exact tension on each of the (4) anchors exactly above the known point for BASE? Would have to do this exactly to calculate the height though. (Like giant tripod with a laser or plumb?)
But even if you could accomplish this perfectly, would the ROVER even be able to get a FIX throughout surveying points under the canopy? Seems the ROVER would have to have clear sky view also correct? So only half solved or use another method such as optics etc?
The multi-track problem is exaggerated. It appears only at modern constructions and on the water. In forests, or rather on forest roads, this problem does not exist.
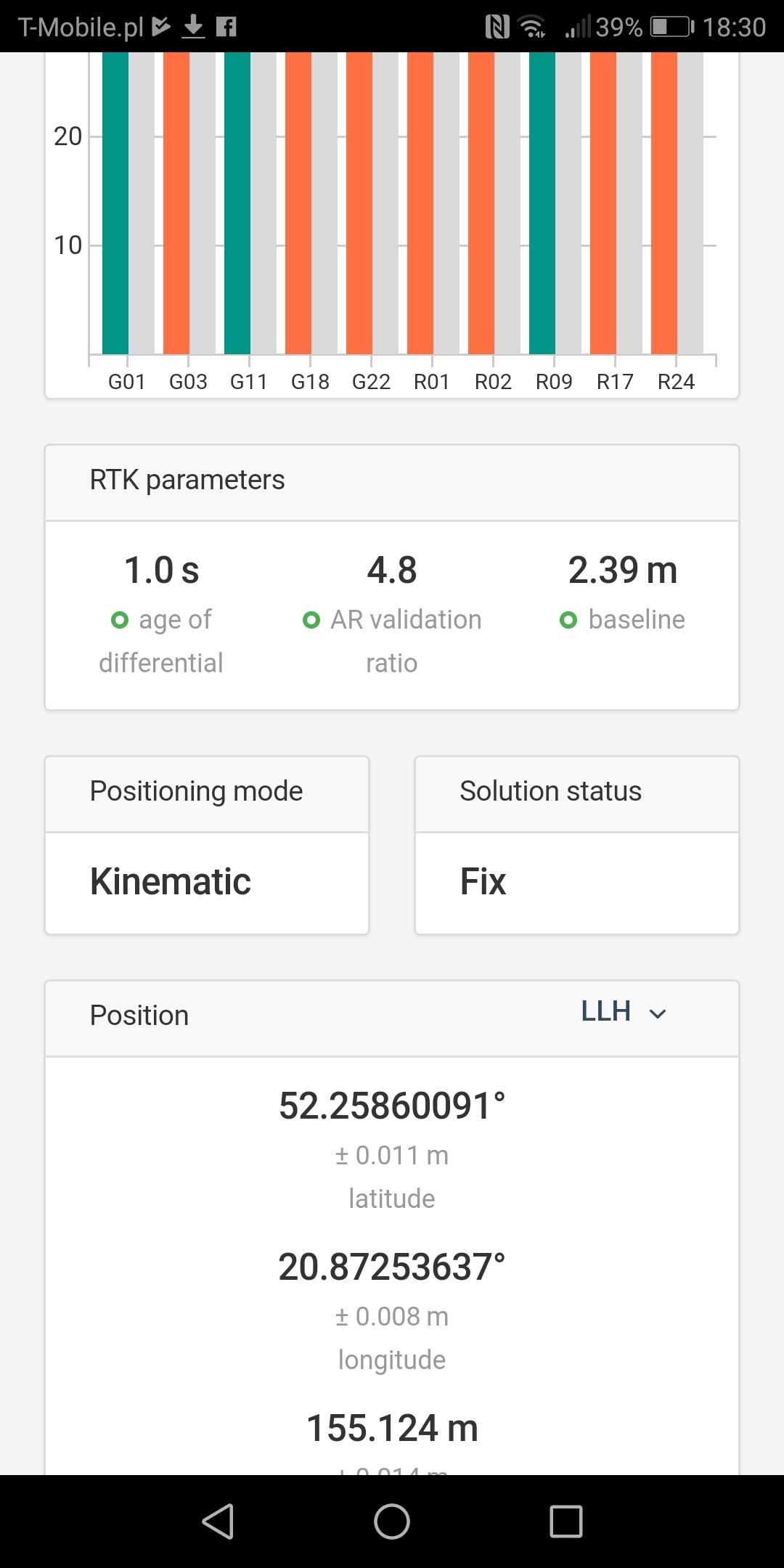
The example here concerns the use of the ReachM module in the AzusRTN receiver as a rover, the base is VRS. The choice of antenna for such a module is important.
If we want to use a ground plate for our receiver then it must be 3D, not 2D (i.e. aluminum foil). The cheapest alternative is probably to put an abrasive disk for metals,
because the choke ring is not an option.
But isn’t the ground plane there to protect against signals entering from below in the first place? So receiver can’t see anything through the metal plate below it. So any signals wouldn’t be able to from below like in your illustration.
Multipath from buildings and so, sure, that’s still a problem.
But I am little confused about your posts. In your previous post you say that it very important to get rid of the multipath problem, and then in your next post that the multipath problem doesn’t exist in the forest? Which one is it?
This general remark, which is not for receiver manufacturers, only those DIY for specific applications (forests, suburban areas, countryside).
Become familiar with the work of prof.Tamoji Takasu. After all, it uses EMLID
Here are the conclusions:
“CONCLUSIONS
In this study, The RTK-GPS performance with low-cost single-frequency antenna and receiver were evaluated by some field tests. According to the results of the experiments, it is feasible to apply consumer-grade antenna and receiver to RTK-GPS. With a low-cost antenna, however, performance degradation is large, so replacing it with a geodetic-grade antenna is much effective to improve the performance. By contrast, as to receivers, the performance difference is smaller between the consumer-grade and the geodetic-grade.”
Please note:
The 2D ground plate protects against signals entering from below but added internal multipath low elevation signals reflected from this plate.
That’s why I gave a link to explain this.
I would like to know where to read up on multipath in the forest (or the lack of it). I can understand that modern construction can be highly reflective to an RF signal. Tree trunks, branches, leaves though: are you of the opinion that these only cause attenuation and not deflection/reflection? What about rock (or different types of rock)?
And also just to confirm your view on the use of ground planes. I can understand how a choke ring is superior at rejecting multipath over a flat ground plane. And also how a large flat ground plane could have a less focused beam (larger phase center variation as you say), but to go along with @wizprod’s question, some kind of ground plane is desirable at all times, no?
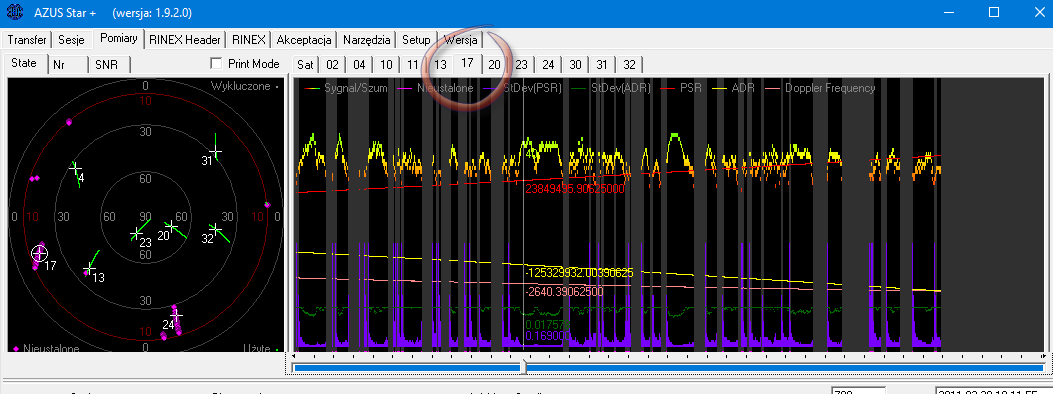
This has been confirmed by multiple measurements. In my article there is an example of such a measurement (BM No. 4 = Reper No. 4). In this session, for example, you can see that the branches and leaves do not interfere, but the trunks definitely do. However, this does not cause any ‘cycle slips’ and degradation of results, with ‘mask elevation’ of 10 degrees.
But in forests it is best to use the ‘Rapid Static’ or ‘Stop and Go’ method.
But question now is, how do you see OPUS helping (say that we do have dual frq data) compared to using RTKpost with a short baseline and using IGS clocks etc?
I can also confirm that more constellations helps.
The best advice I found was to use MGEX clocks and orbits. If you just use the IGS products, only GPS and GLONASS will be used.
I didn’t see much different with IGs ultra rapid and rapid. Final IGS gave some difference. However the more sat systems enabled by MGEX made the most difference.
And this is static with postprocessing? For what kind of observation times?
We’re trying to get mean accuracy significantly below 3m, without doing too long observation times. Skyview is worse than what you describe in many cases.
With 5 minutes of static observations, this is possible.
I’ll try adding MGEX data.