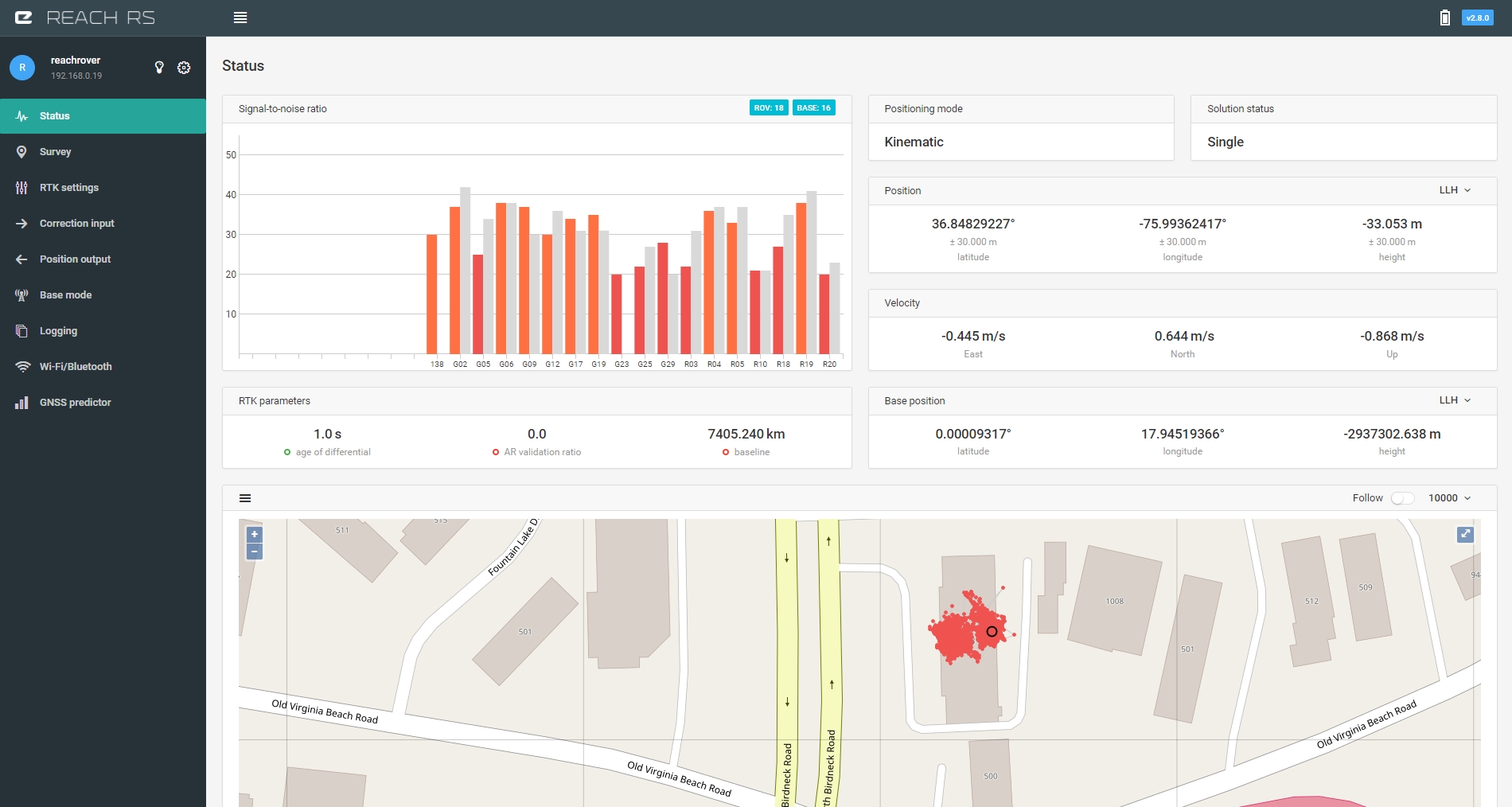
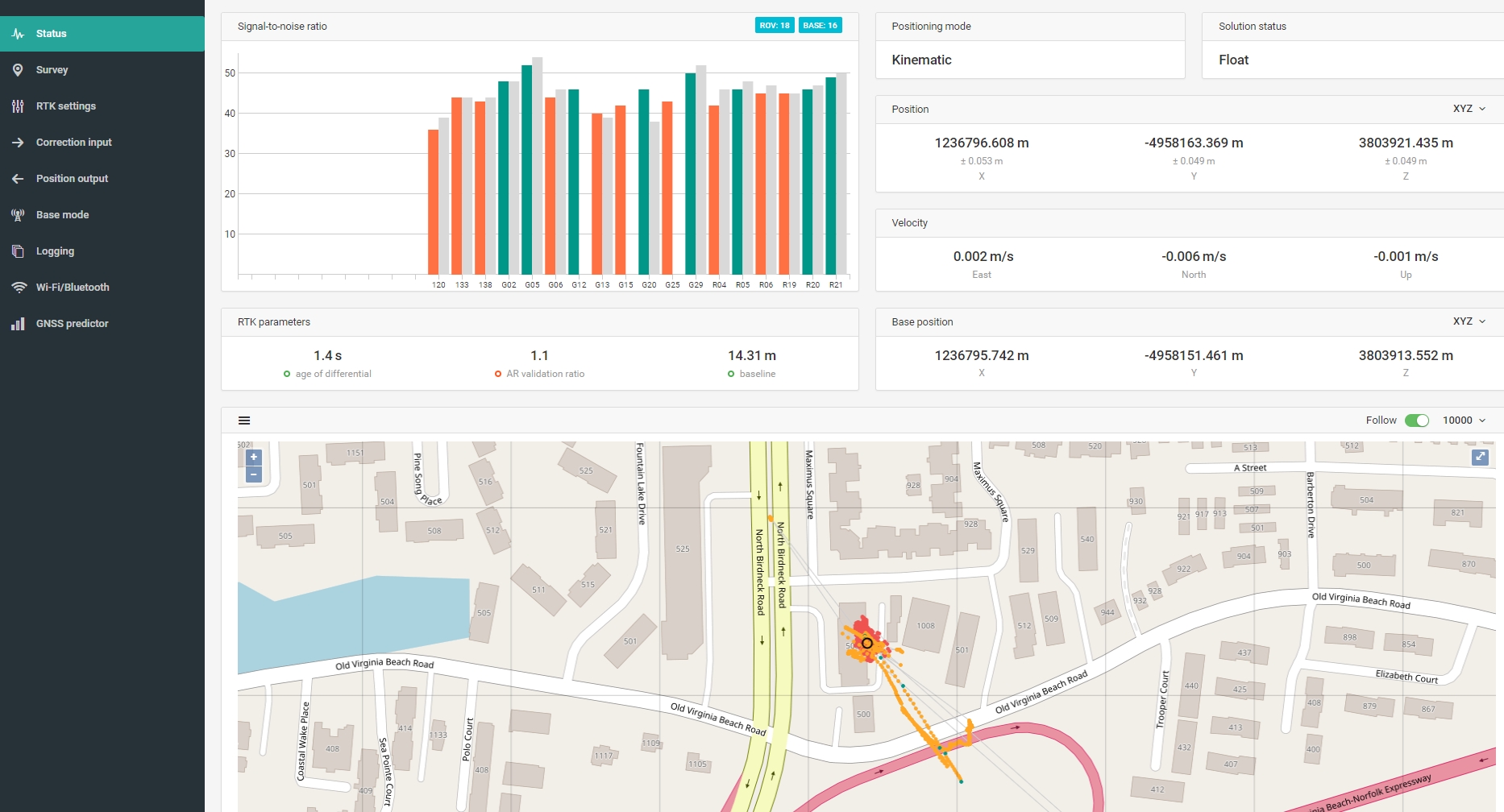
Does anyone have a detailed guide on this type of setup. I’ve designated one as the “base” and turned on base mode, and matched those settings on the one i designated as a rover. Using the lora radios i am unable to get a fix, and also i return a baseline distance of 7405.242 km, which is inaccurate as i am looking directly at the base and my eyesight is nowhere near that good.
I would try with the units outside and let the collect data for more then just 1minuts.
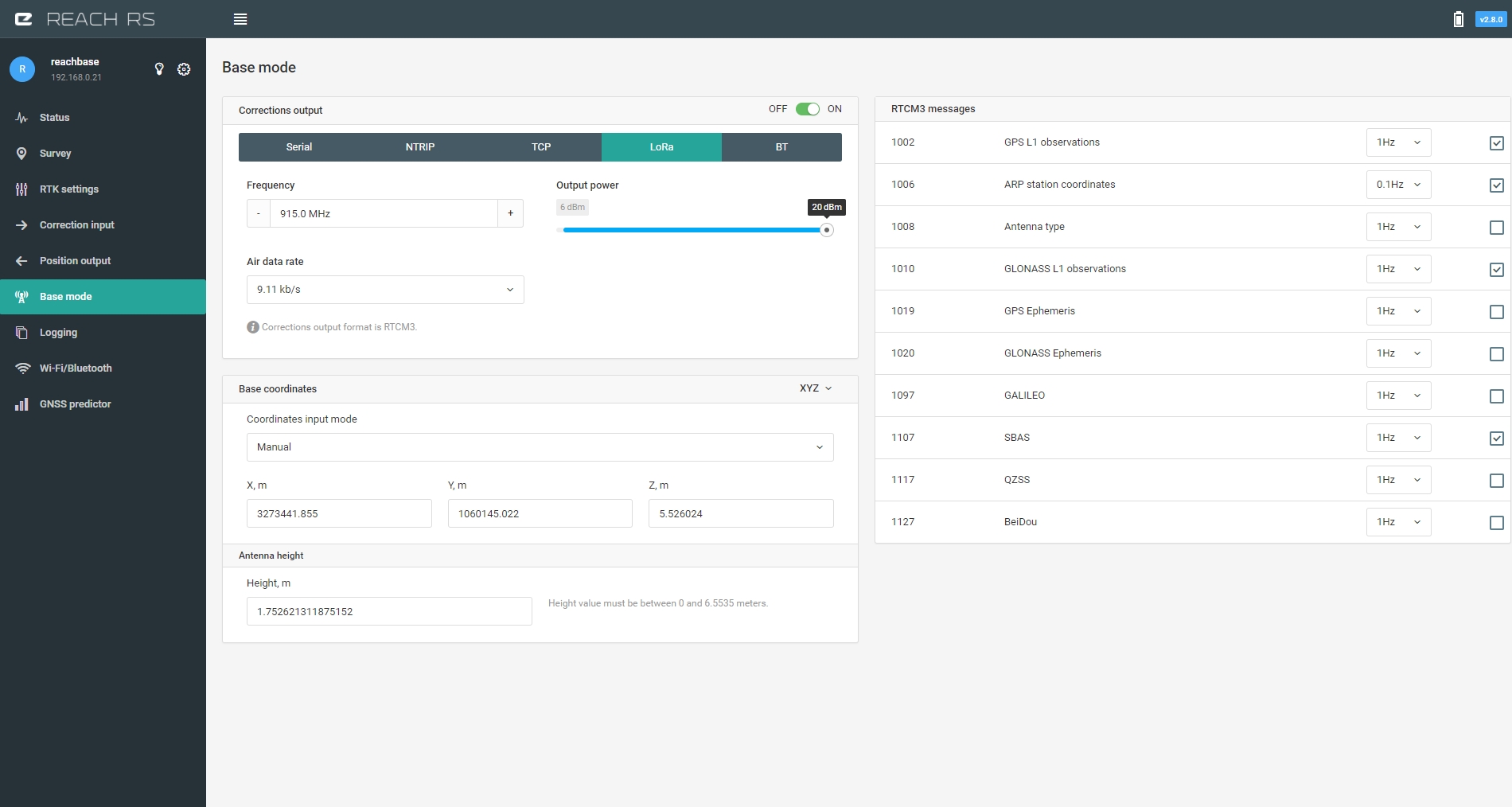
Also set base mode to singel or static in continuous mode.
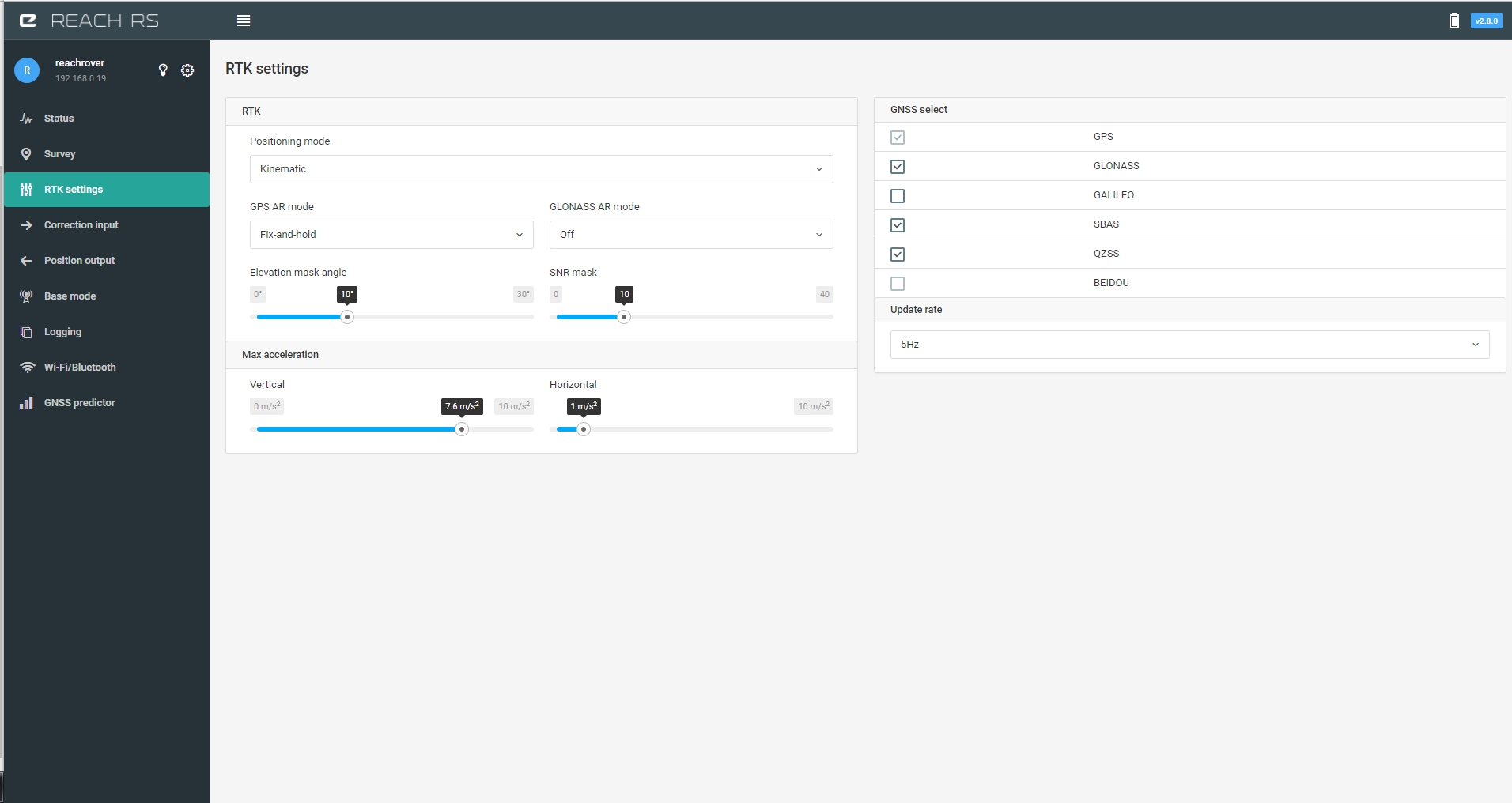
Rover is ok, but tou can use glonass AR on
Also make sure you typed in correct the coordinates of base
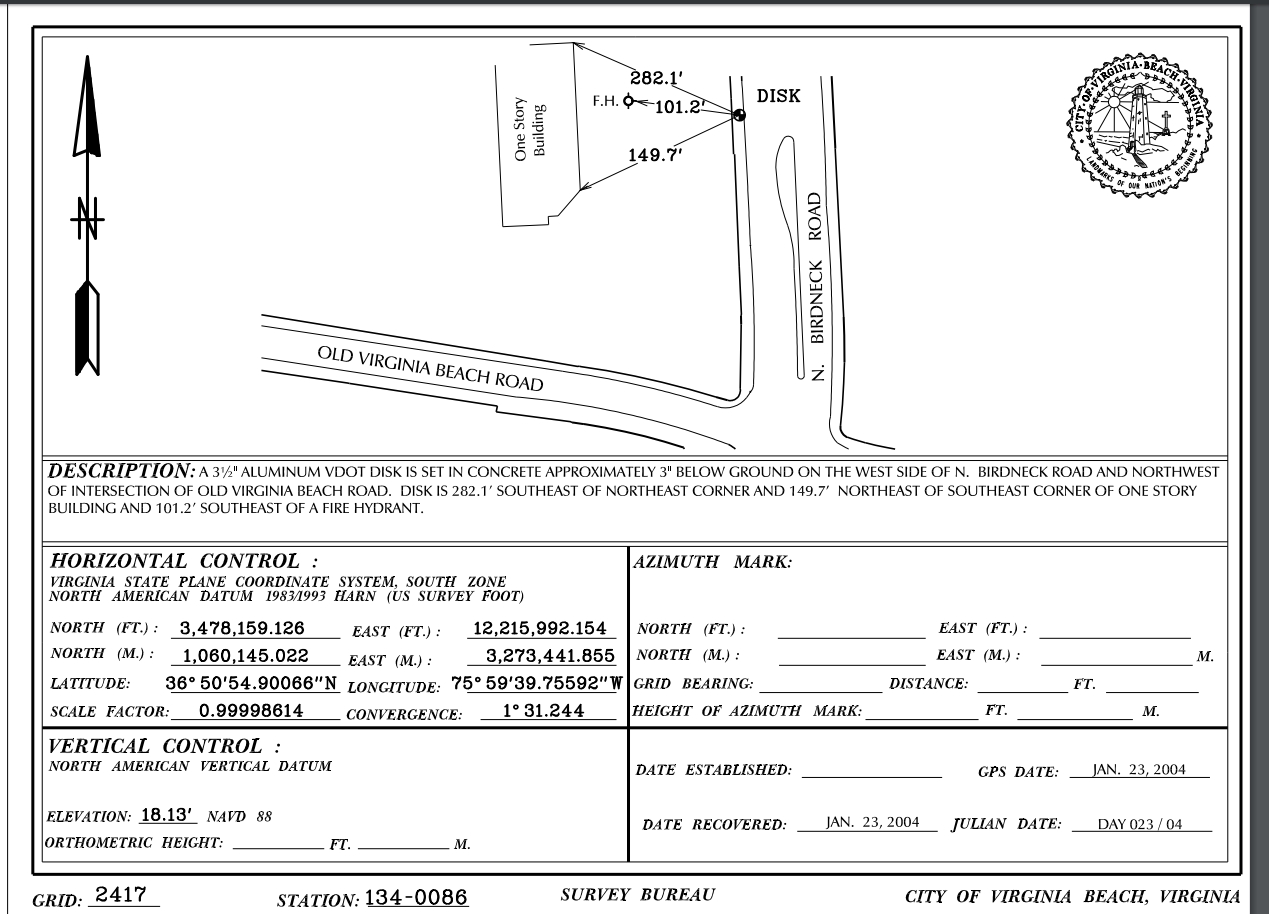
i am in the states, so what i had entered in manual mode are the state plane coordinates converted to metric (we are super imperial over here). i had tried testing averaged coordinates ealier, and returned a baseline of roughly 7,400km, same results as manual.
im not sure that the accuracy of the antenna height translates to a 7400km distance with the lora radios but i’ll give it a try. And I’m a surveyor, so yes, i need that kind of accuracy
setting the base to average single does improve the baseline on the rover btw, but does not solve the issue of needing to use a fixed point for my base setup
I assume you are aware of multipath and interference.
I would save raw log (on both device) for few minutes and processes it for more details and possible cause for this behavior
Edit: or swap location and see if its reproducible, But suspect this to be a missconfiguration and/or a intereference issue.
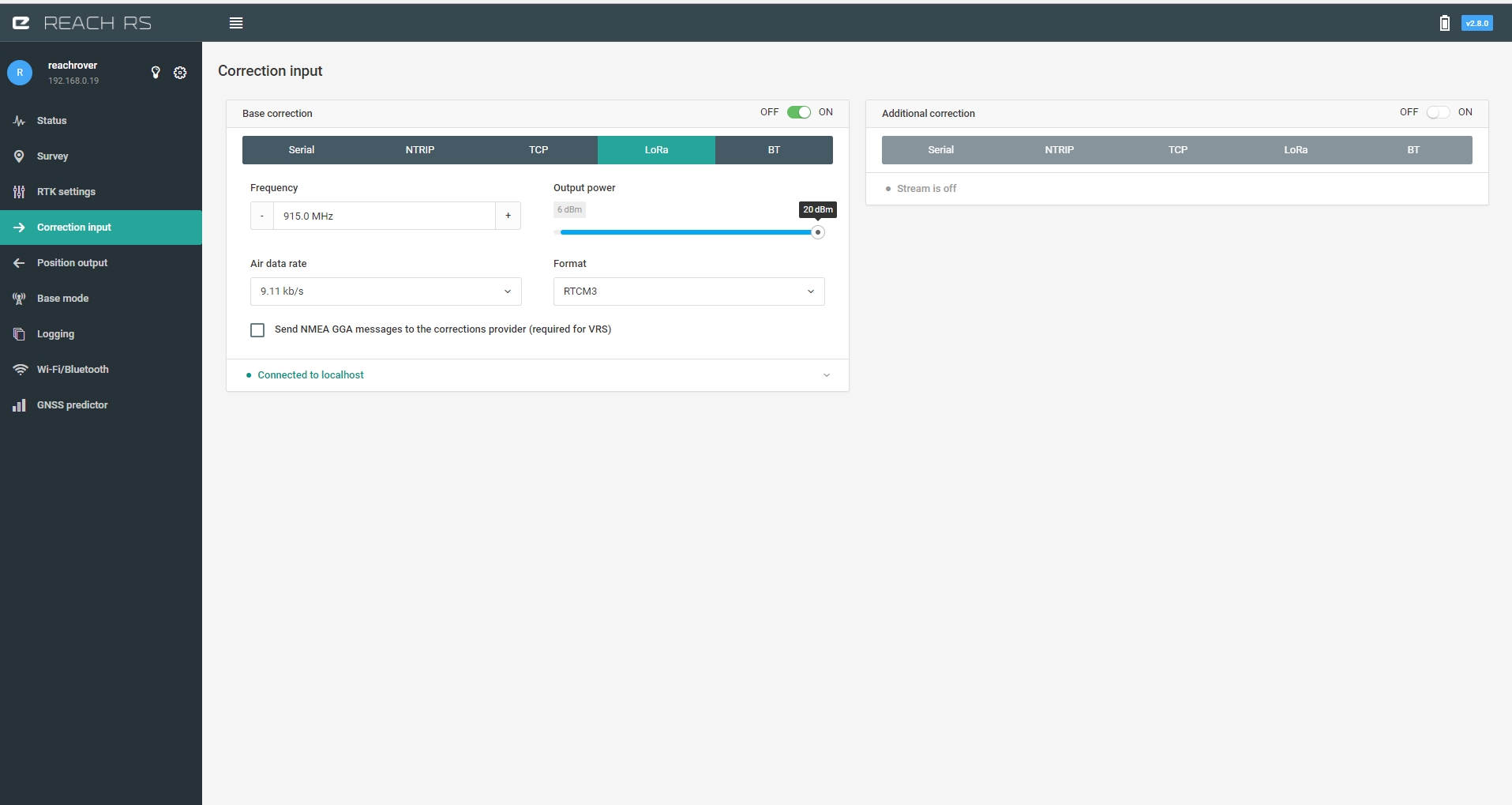
i received the same kind of widely varying results using one of the units receiving corrections from a ntrip server as well. its possible that there is a wide array of interference in this area that other hardware providers, such as topcon, carlson and trimble, are not susceptible to. but thus far our emlid’s have been far too inaccurate on both a base/rover setup using lora radios, as well as receiving corrections from a ntrip server to be useful. i’ve yet to try running these units as static then post processing the results.
So the only time these will be accurate is under absolute perfect conditions? completely open line of sky and nothing on the periphery, no cars or small trees or power lines close by?