I would like to know how I can update the coordinates of my base station’s location. I set up my RS2 up as a base station on a new site a couple of months ago and used the base data to post process drone data. Since then, the company surveyed in my station’s location and sent me the updated coordinates and asked me to reprocess. How do I integrate these new base station coordinates into the OBS file?
No need to update the OBS file. You can post-process drone data again using the revised base’s coordinates. What software do you use? There should be an option to enter them manually.
RINEX header contains averaged receiver’s position. It’s not even linked with the one you see in ReachView 3. And it doesn’t affect observations that came from satellites and are recorded to this file.
I am using DJI Terra to process the data. It doesn’t provide an opportunity to interact with the base station information which is why I need to update the OBS.
Revising the base’s coordinates couldn’t be as simple as entering my surveyed coordinates on the “Approx Position XYZ” line of the RINEX header, could it?
RTKPost outputs the .pos file, which contains coordinates of surveyed points. In other words, it will be the track you took with the rover.
This is how it usually works when the base’s coordinates are revised. You just enter new ones manually during post-processing, and that does the trick.
It seems that the edit-header way is the easiest one. Please keep me updated on how it’s going!
Hi, I would like to tag on here with a similar situation-- I was at a remote location with two RS2s-- one of which I used as a base, on a given point, three days in a row-- I shut it off in evening and then started it up in morning. The result is 3 days of UBX files-- I have processed them to obtain 3 separate OBS files and have submitted them to NRCAN for a fairly good result each day (X and Y are plus/minus 5 to 7mm, and H is plus/minus 2.5cm). I have now a good idea of the current coordinates of that base point in DMS, UTM N-E-H, and in Cartesian coordinates (X-Y-Z) and I have averaged those values to obtain a 3-day average.
While the base was collecting data all day, we had two days on which we used a separate RS2 as rover where we setup on a point and turned the RS2 on for 15 to 20 minutes, and then shut it off. Each of the points now has a UBX, and, after running those few points through RTKConv, a POS, NAV and SBS file. Can you point me to the process by which I use RTKPOST to establish the positions of each of the distinct Rover points? Or am I missing something here?
To make it easier, would you mind if I replace RTKPost with Emlid Studio in our discussion? They are made for the same purpose, but Emlid Studio is our new post-processing software that is much more straightforward. If you still need some tips about RTKPost, just let me know.
In fact, you’ve already done most of the work because you got the accurate base coordinates. Now, you need to post-process each rover’s log with the right base’s log. By “right”, I mean the log that covers the time of the rover’s log.
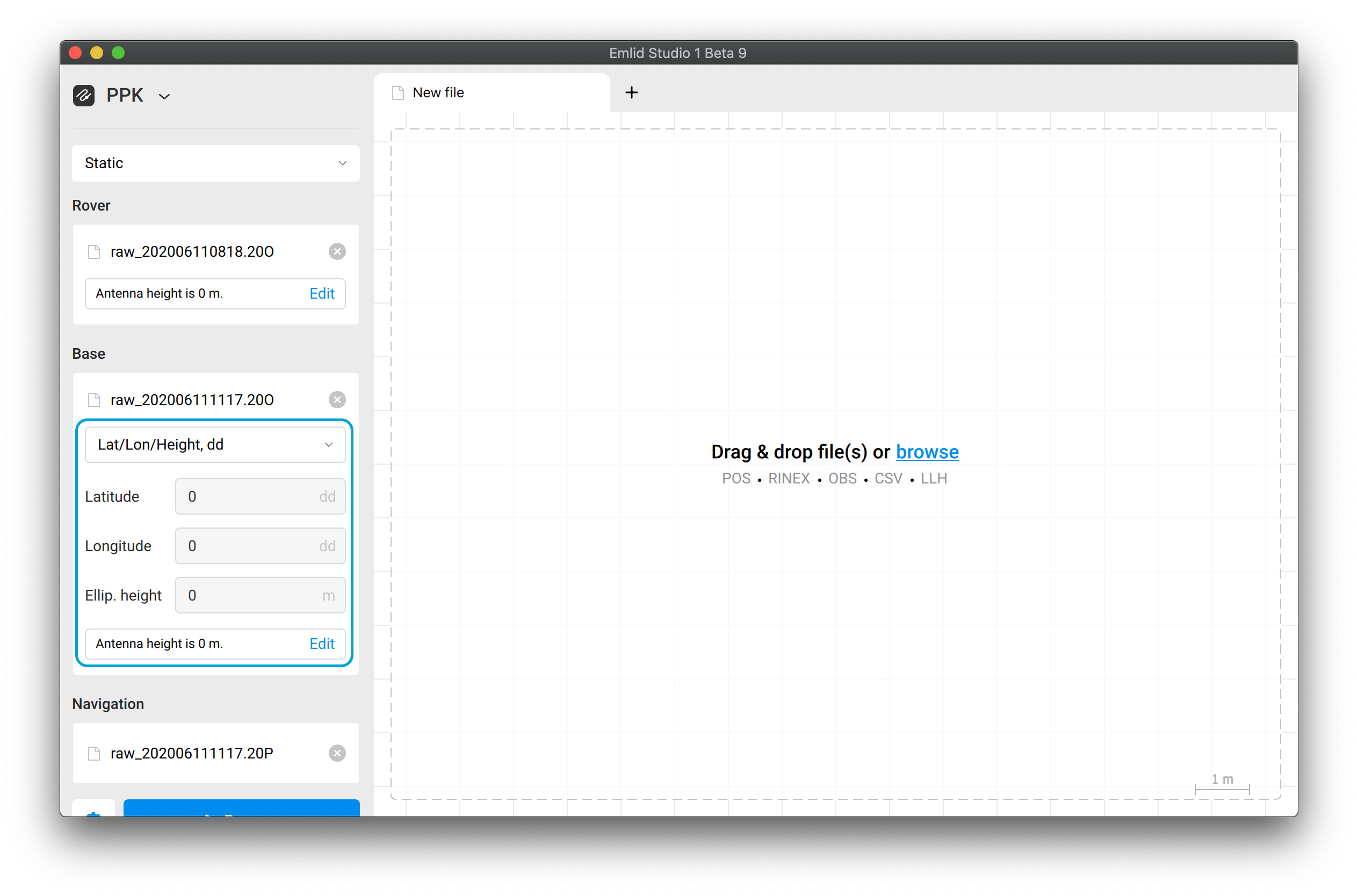
In Emlid Studio, choose the Static mode, upload the logs, and fill in the base’s coordinates averaged from NRCAN:
Also, for your future reference: in Emlid Studio, there is a feature that can help you with similar projects. It’s Stop&Go with ReachView 3.
With this, you don’t need to record a separate UBX for each point. You can record just one log and collect points in ReachView 3 Survey project. It should take less time for post-processing. Here’s more info
Thanks much, @svetlana.nikolenko. Very helpful. I have been trying to make use of this today. But one more related question arises: I mistakenly set the base to record UBX files in 4 hr increments-- I should have just let a full day’s worth of UBX (rather Rinex) files accumulate in one file. Now I have 2 or 3 of these from a given day. Can Studio do the combination of one day’s worth of UBX files into one UBX or Rinex file?
Thanks,
Dan