



Hi, now that the Reach modules now save Rinex data, can anyone share their workflow steps on what is involved to setup their reach modules to log their static GPS locations (on say our ground control mats) right through to the post processing steps using RTKLIB software. We would like to leave a reach module on each or our ground control mats while we fly our survey, then process their location to use within PIX4D. Thanks.
What you should do is set the devices to Rover mode with reach_single_default config. Make sure raw data log is set to a file with default path(in the newest ReachView it will not show the path), click save and say yes to load the config. The processing will start, and so will the logging.
Once you want to finish writing the log, you can stop rover mode from ReachView or just power Reach down. After boot, it will start writing a new log with a different start date.
Then, the logs are available for download from the Logs tab.
Post-processing tutorial is coming soon
Thanks Egor. I am aware that our Australian government can post process the rinex logs free of charge but they require both L1 & L2 data unfortunately . http://www.ga.gov.au/bin/gps.pl
Looking forward to your post processing tutorial.
1 Like
L1 & L2 will always be needed when distance is longer than a few 10km from closest known points (like those services like Auspos use). From a survey point of view, L1/L2 receiver is needed to face most cases.
Does Emlid have plan to propose dual frequency L1/L2 receiver soon ? I know it is a major cost issue, but it is probably a real need of the market.
1 Like
There is a possibility for this in Reach 2… It has been discussed here before, the Emlid guys would know more though.
Finally, best money option could be one L1/L2 base recording Rinex on base point (enabling post processing PPP) + L1 Reach mobile on drone, recording also GPS Raw data + flash signal as external event in log file. No radio needed for real time, navigating in stand alone GPS is enough. Post processing solution only for centimetric photo location.
I ordered one Reach module, I will use survey grade Trimble for base.
1 Like
Pascal,
That sounds very reasonable. I can also tell that if there is an NTRIP server nearby (static is known to work up to 100km), a good option might be to set the base Reach as static rover running against that NTRIP and logging both raw data and position. This way you do not need constant comm with the rover on the copter, but at the same time you get good base position after the flight. If there is no NTRIP base nearby, L1/L2 base + Reach onboard is definitely a great combo.
Igor
Thumbs up! Totally agree!
I will first need to try the following tandem:
- Leica GPS 1200 Base
- Reach as a Rover
Survey then post process with RTKLIB.
Igor, could you, please, advise the minimum required configuration on Reach? Is “reach_single_default.conf” is OK and allows to collect all the necessary data for post processing later in RTKLIB? I will convert Leica GPS 1200 Base data to RINEX separately.
All the best!
@Vusal Yes, make sure that “raw data for onboard receiver” is set to “file”.
Igor,
There is a “Moving-Base” type Positioning Mode in RTKPOST that requires OBS file for Base Station.
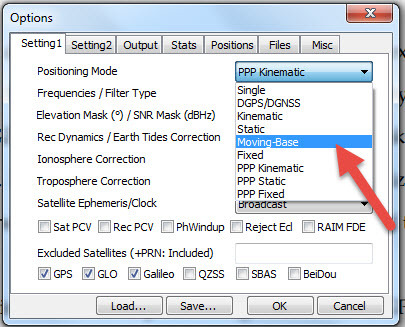
Should I specifically set up Reach as Base or I can leave it as Rover Single and keep it static and then use its RINEX files as Base observations?
If Reach is configured and started as a Base without Lat/Lon/Height coordinates, it is clear that it will not send any RTK corrections to Rover, but will it finally get its location as it does in Rover Mode or entering Lat/Lon/Height coordinates manually is the only option? If Lat/Lon/Height coordinates are not entered at all will Reach still collect observations in Base mode for post-processing? If it does, is there a way to manually enter Lat/Lon/Height coordinates during the post-processing?
Please, advise.
You can keep it as a rover.
At the moment entering manually is the only option.
It will not let you start operation (including logging) unless you enter the coordinates.
In RTKPost options you can find a tab where you can enter base coordinates.
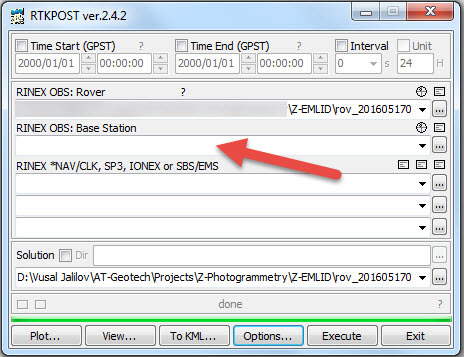
If I post process the Base OBS in RTKPOST as single I get thousands of dots. How can I get the adjusted Base coordinate? Do I have to run STATIC post processing against OTHER STATIC base station to get the adjusted coordinates?
How can I make sure Reach is using GLONAS?
All the best!
Used the static stations from UNAVCO. Both stations are located quite close. Both are @ 30 seconds interval.
Post processed Reach Base observations as STATIC against these stations - NO FIX, the solution remains in Q5.
All the best.
Is there any deadline set? ![]()
@Igor_Vereninov, Thank you for the Tutorial of gpspostprocess, If I don’t bother about the absolute accuracy of coordinate related to the Base from country or publicly network, can I just input the coordinate from my smartphone to the base station column data lat/lon/height? (coz I only need relative accuracy or precision for the rover related to the reach base)
@bimbodanu888 Yes, that would be okay.
Thanks mikha…
Igor : Excellent and so clear ! Now I just need to receive my Reach and start testing…
Dear Igor,
Thanks a lot for the tutorial.
Is there a way to perform GPS post processing in RTKLIB with more than 2 stations SIMULTANEOUSLY?
Regards,
Vusal