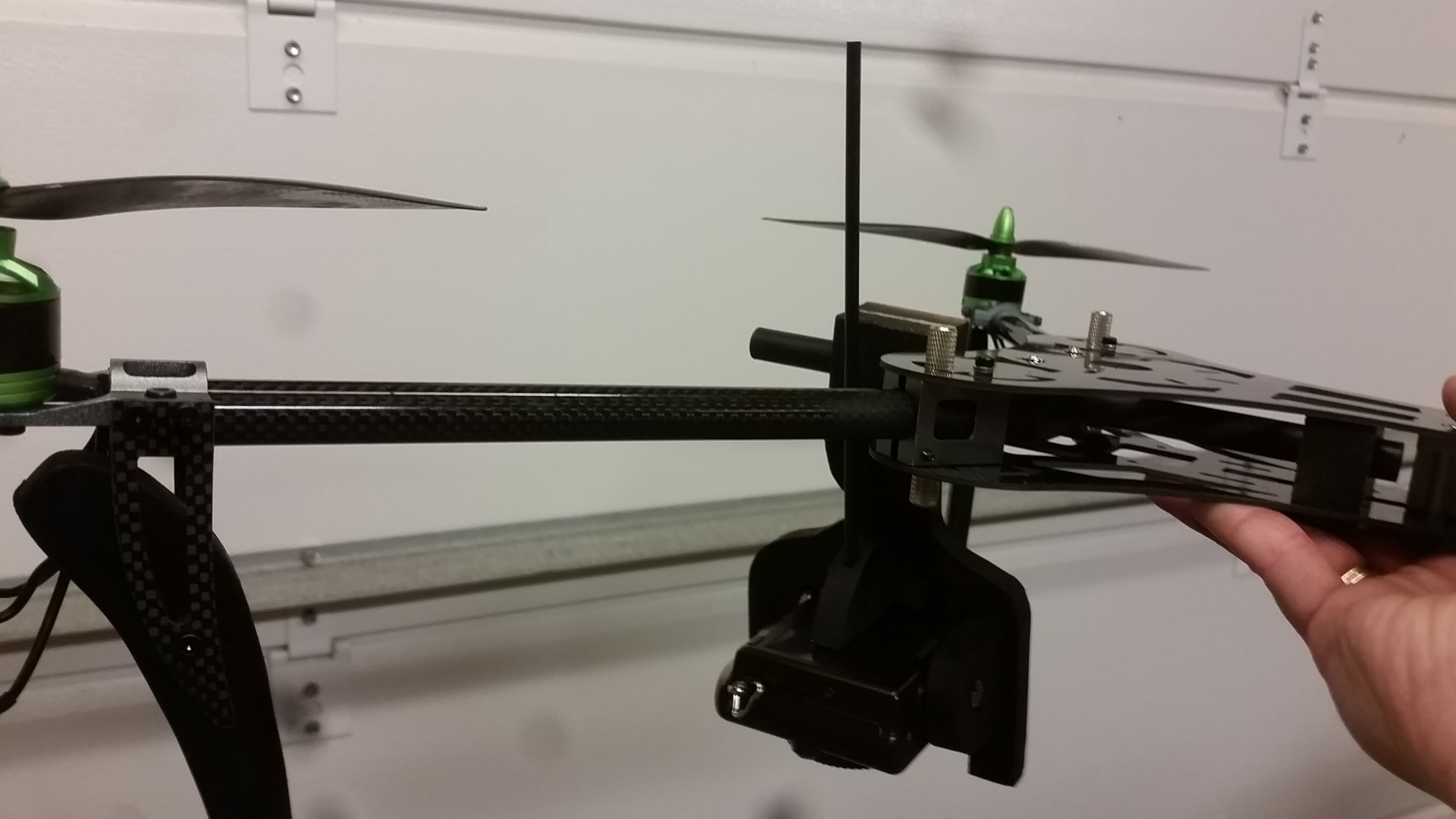
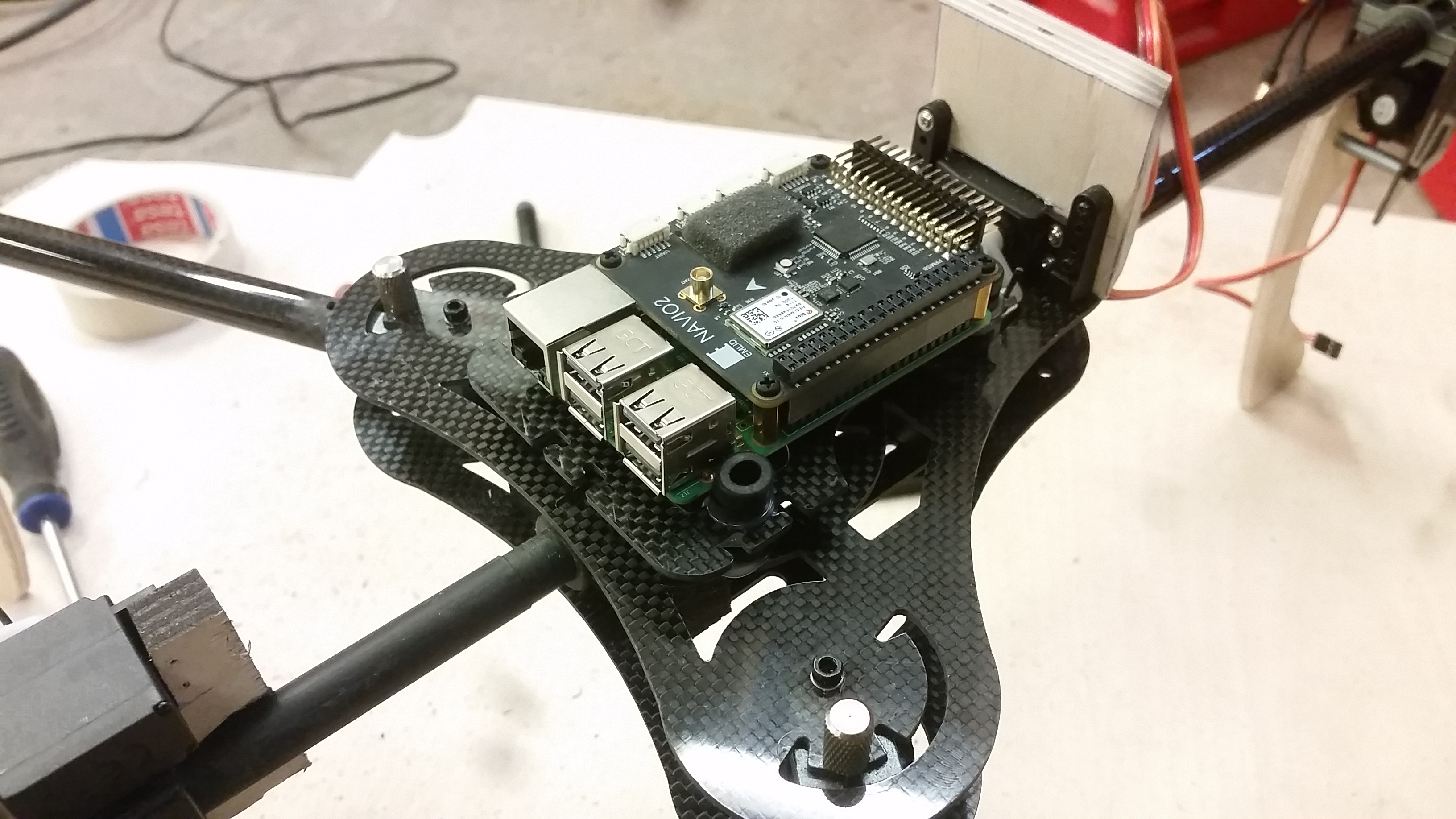
Here is the tricopter.
A HK carbon model with 12" prop
3x30amp ESC, 750kv motor,
2 x high speed digital metalgear servoes for the gimbal,
1x high speed digital metalgear servo for the tail motor.
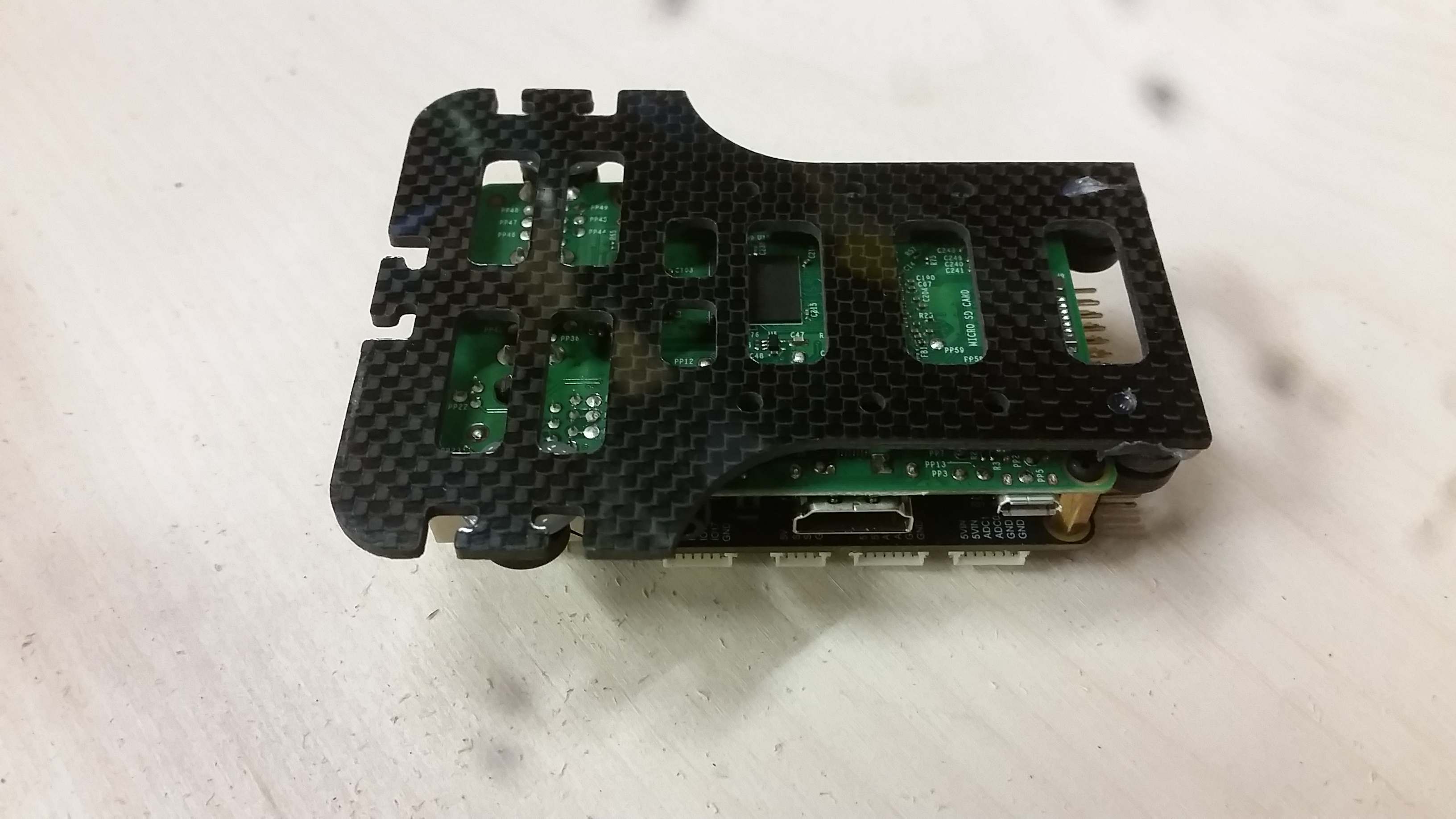
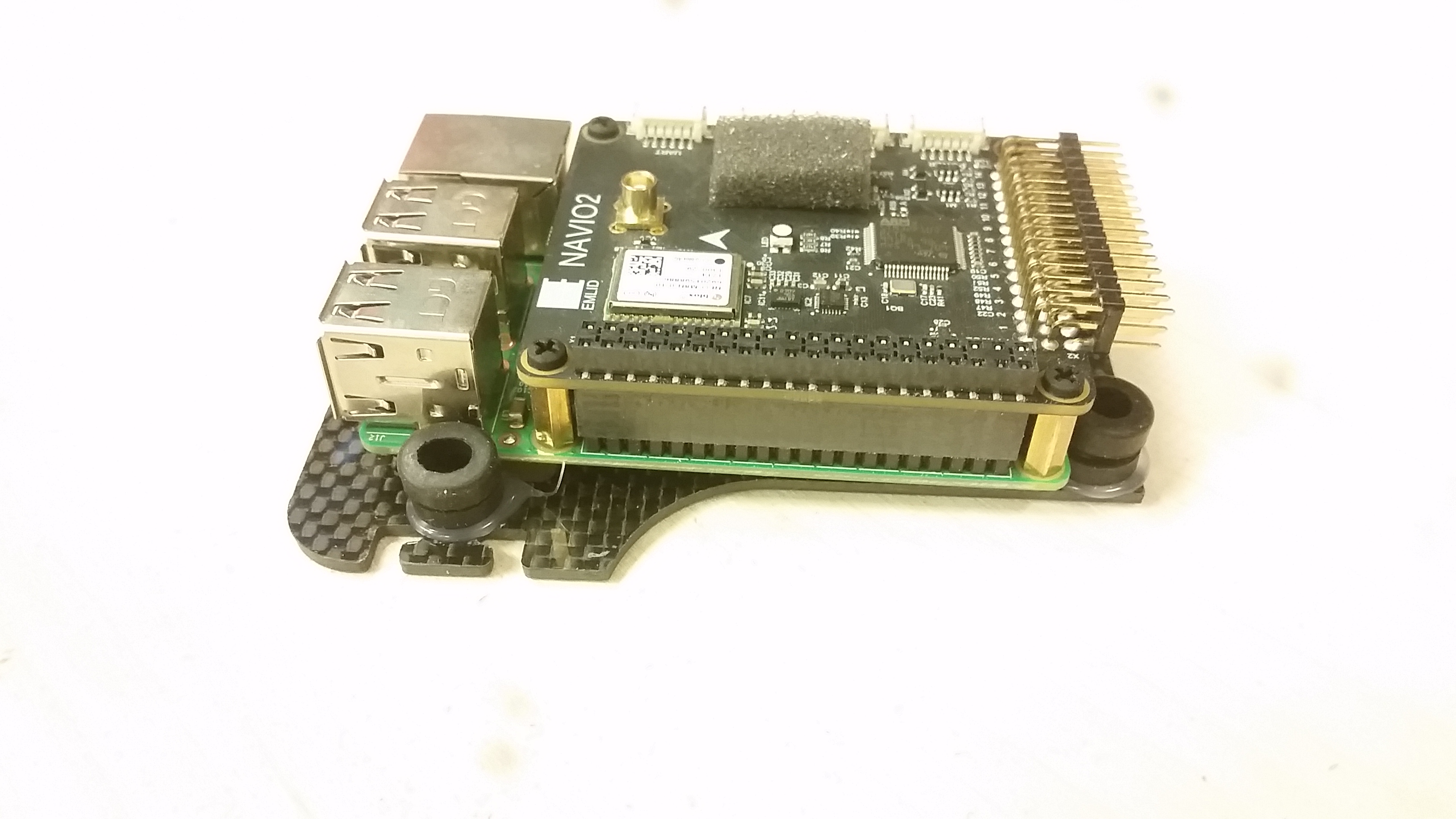
Navio2, Reach GNSS, Raspeberry PI and possibly adding more.
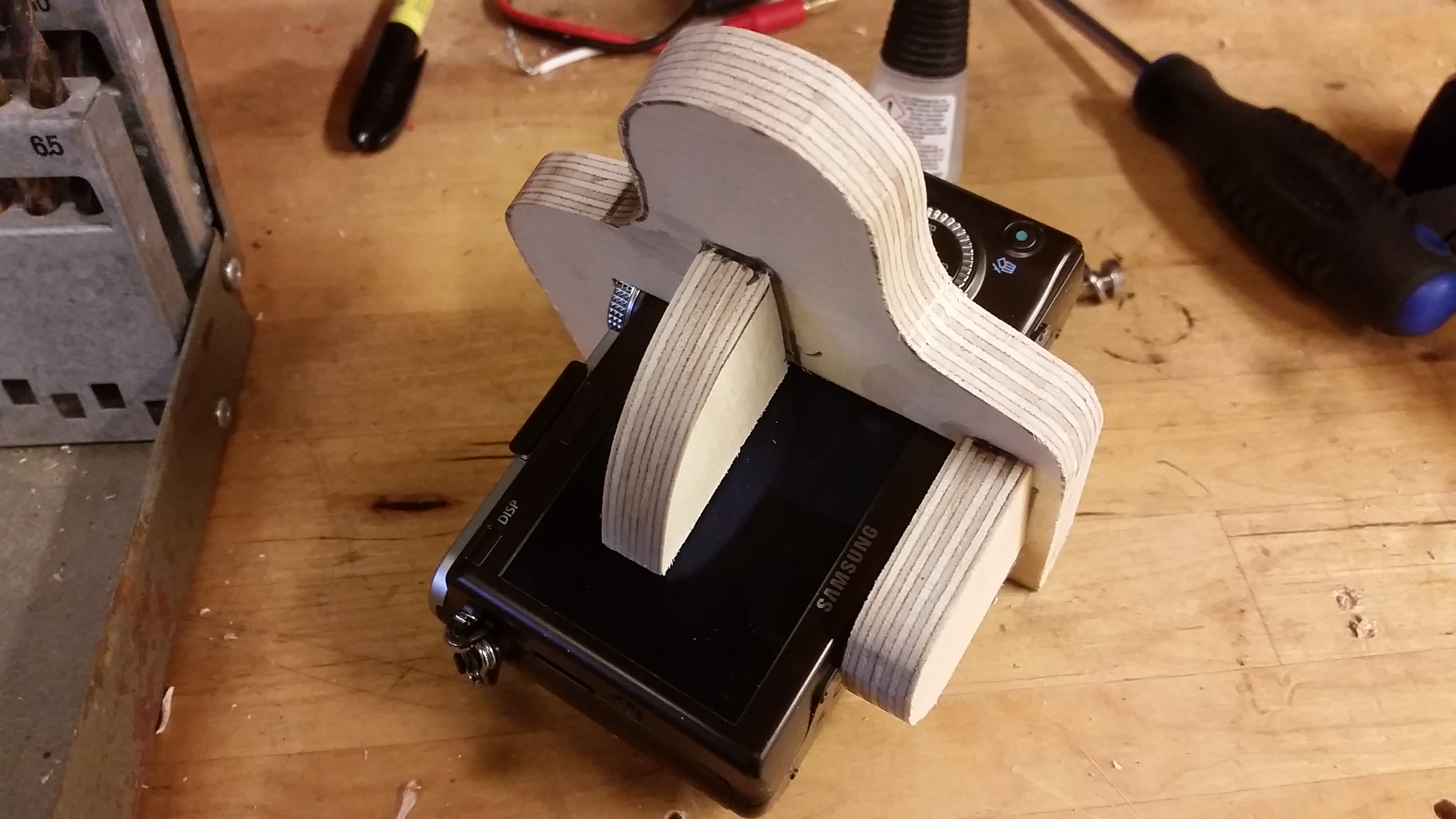
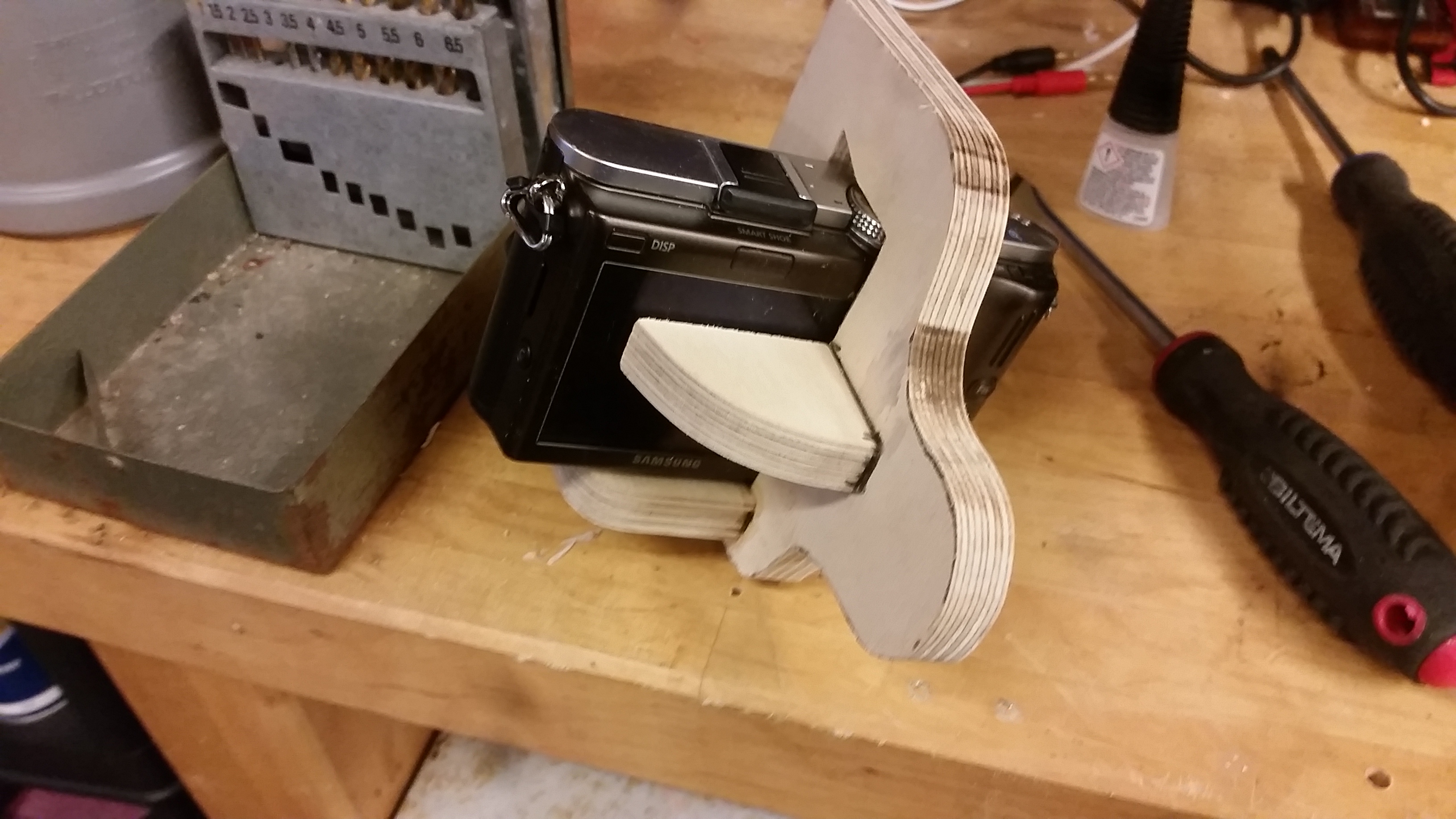
Custom made gimbal for down/forward pointing camera. Mounted in the front of the copter.
Finished the gimbal. Gimbal weight incl. one servo 165gr. Antenna mount has different holes depending on direction/angel of camera. Camera can be adjusted all the way to forward pointing.
Did a manual test of it`s functions, video on youtube
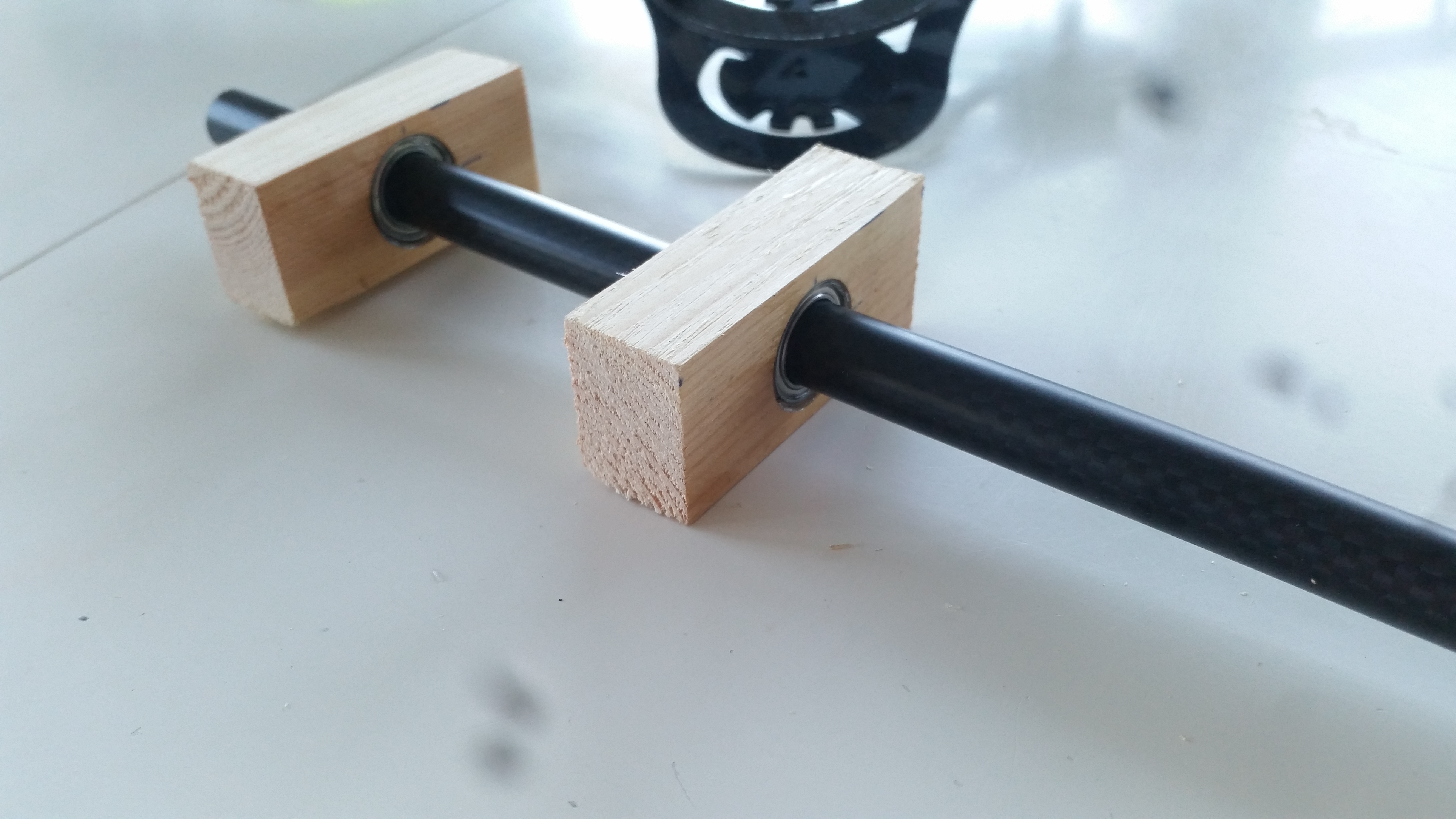
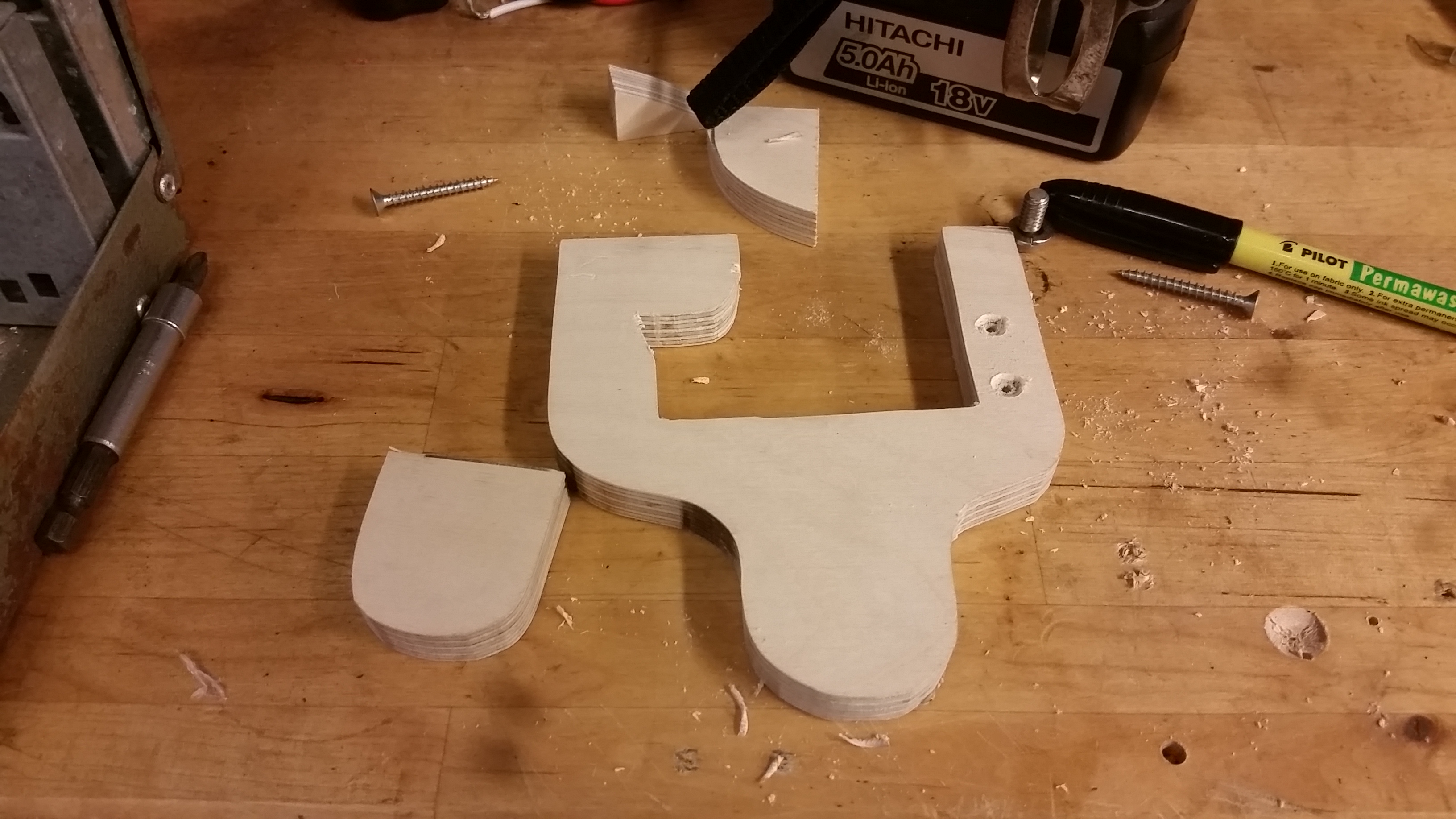
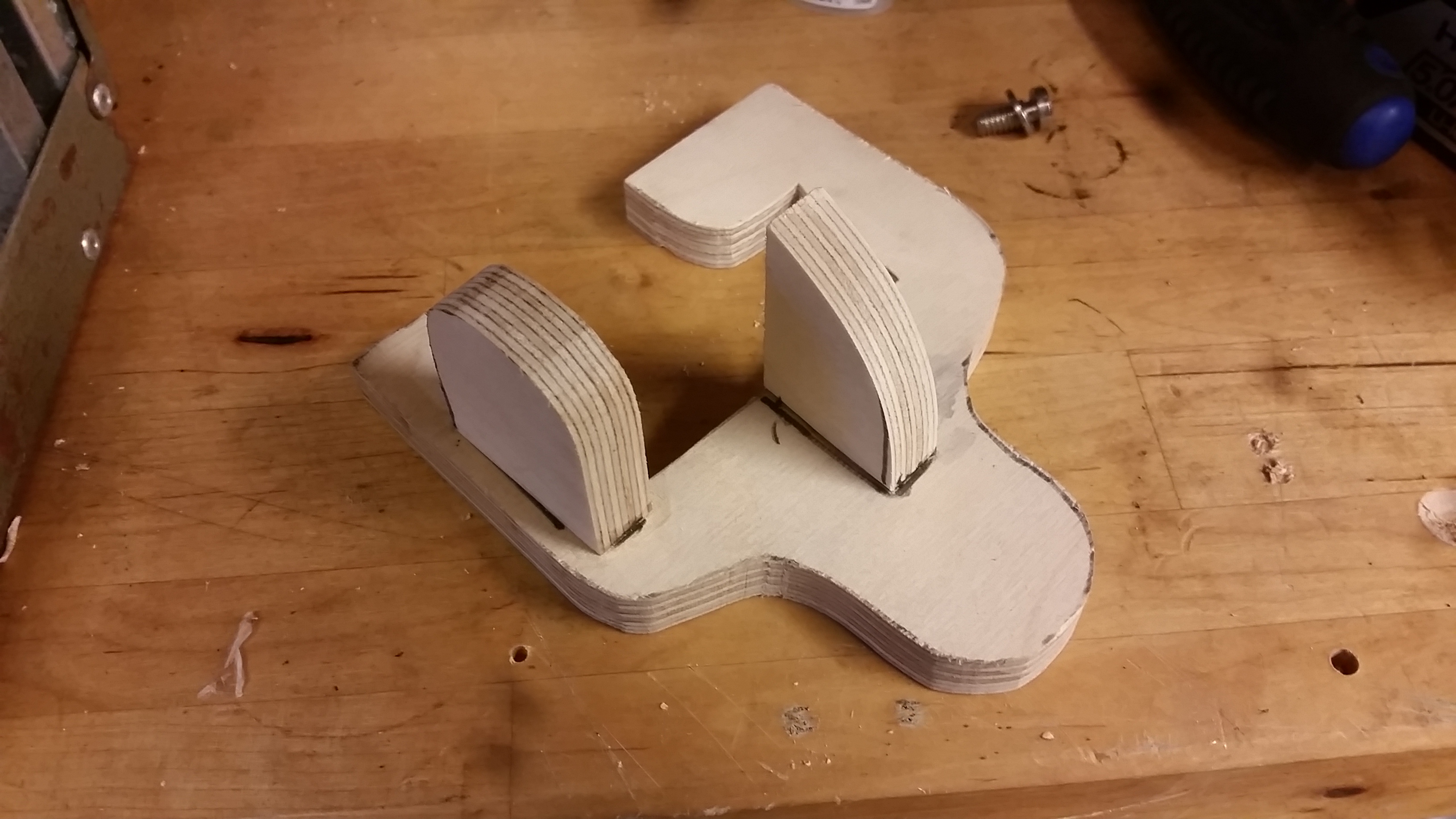
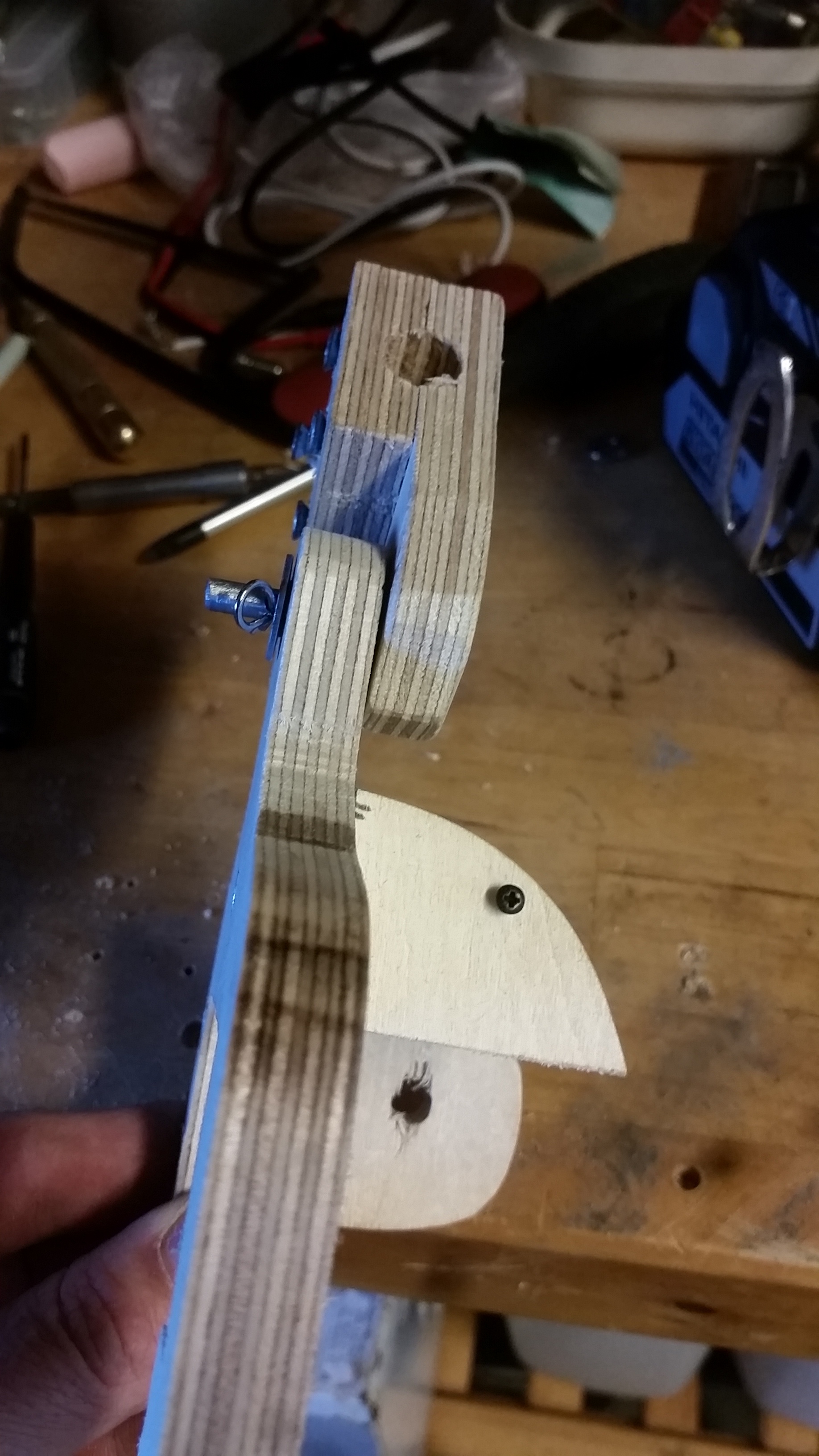
Got the servomount for the ball bearing carbo tube going. Need some trimming and paint to look good.
Should upgrad with better linkage and finer parts to make it look more pro and tighter i guess.
It does not include the roll servo (34gram) and the two ballbearing mount of wood (2x12gram).
If i need to build a new one, i think 9 and 6mm birch veneer should be enough to save some weight. This 12mm is overkill but sturdy as hell.
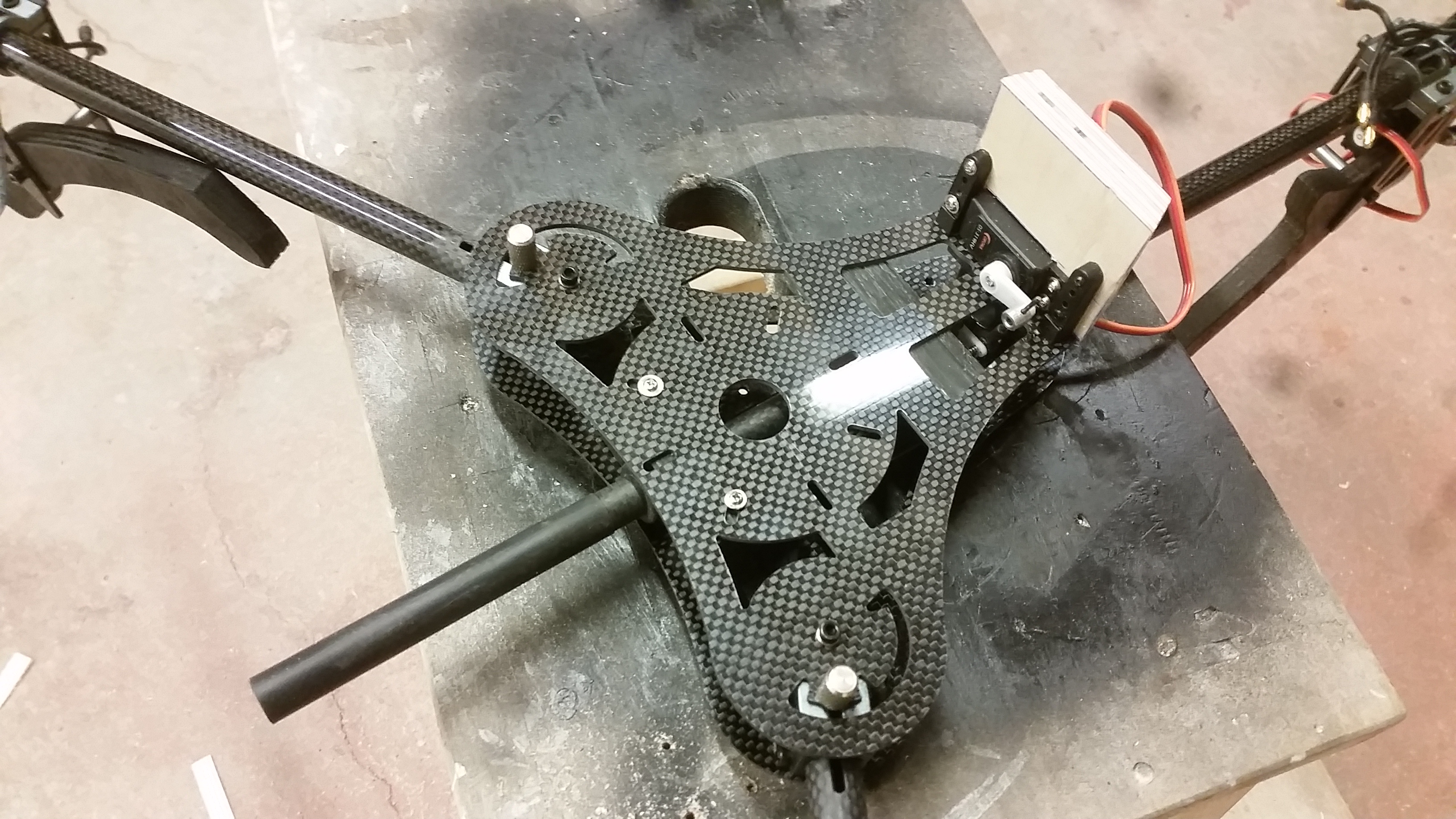
Shock absorbers for Navio. One set mounted to hold the Navio(it slides into place) and another set of absorbers between the main frame and suporting frame for Navio.
I would be very interested to heare how the tricopter performs for mapping. Especially under windy conditions.
I was working with an hexacopter but will build an additional quad to have a backup (currently I’m rebuilding I my hexa after a crash).
I think it is somehow difficult to realize a copter which has a long flight time >=30 min and can also work under conditions with high windspeeds ~ 50 km/h. The hexa can fly savely 28 min and handle strong wind when the battery (3S) is above 11,1 V but has problems when the voltage drops below 11/10.9 v.
Me too. I have no idea how this performing with the extra weight.
I went for high torque engine and 2-4cell 30amp esc. Flies ok with no load but 3-4cell for heavy tasks. With 4 cell it should almost be possible to do 3D moves with camera under. But for duration, extra battery should keep it going for a while. Time will tell how much wind it can handle.
Should be ok, but any tip on smoothing out jitter/choppiness is welcome
The servo linkage from servomount to pitch axis should be firm with good authority.
Edit: I should get a new camera or phone. The lense is clogging due to dirt
Well, its not the roll servo per se. It has good authority but linkage solution i made did not correspond to the output resolution the servo has ( Dead Band: ≤3uSec).
Current setup gave me 100degree throw on the roll bar, way to much. So increasing the linkage arm on the roll bar should give me smoother resolution on the roll.
I hate to say it (I like the construction with the bearings) but the performance looks awful. I hope you can improve that, otherwise I would go for no or for a brushless gimbal. I think if you go for no gimbal you can add overlap to compensate at get some more flight time and if you go for a brushless gimbal you will get a far more responsive and smoother stabilization.
I made my brushless gimbal based on alu pipes, RCtimer GBM2804 motors and a Storm32 BGC board and a saw, a drill, some screws and glue. It works almost flawlessly with a 300g camera. And I also can make panoramas with that gimbal… .
You`re right. The roll is bad on that one. For video is no good, for photo ok as the main function to keep it straight down pointing.
There are few things to address but need different parts to make it work better. There are some slack in the linkage i use that makes it to loose but that would be in an 2.0 version i guess
Right now i need the main concept to work and improve later.
Moving the center of gravity for the camera up to around the center of the boom will help alot but that is a different story…
I’m on my own ride But my last build was quite useful. Not a real beauty (I still can see its own kind of beauty ) but it did a great job until it finally landed a little bit to fast. I’m trying to get as light as anyhow possible while still be able to fly in strong wind.
I also did try servo gimbals but I think brushless gimbals are far superior, even for mapping. I also wonder whether the servos are fast enough to compensate fast movements.
I’m looking verymuch forward for your next reports. I would like to build a servo gimbal for a raspberry py camera, so I’m ready to adopt your experiences ;-).
My next report would probably be about how far into the ground i crashed it
Would love to work with metal, but all my tools are made for wood and is easy for me to make adoption or custom shape for what i need. If i land on a good solution i might get a metal version of it.
My next move now is to get it airborn and see how much impact the bad roll is giving me.
Oh, love your version of the gimbal. Do you have a video of it as well?