



I purchased the taranis x7 and the frsky grx6. I think I have them binded but the rcinput.py file from the emlid navio repo doesn’t recognize any input. Here are some screenshots of them.
2
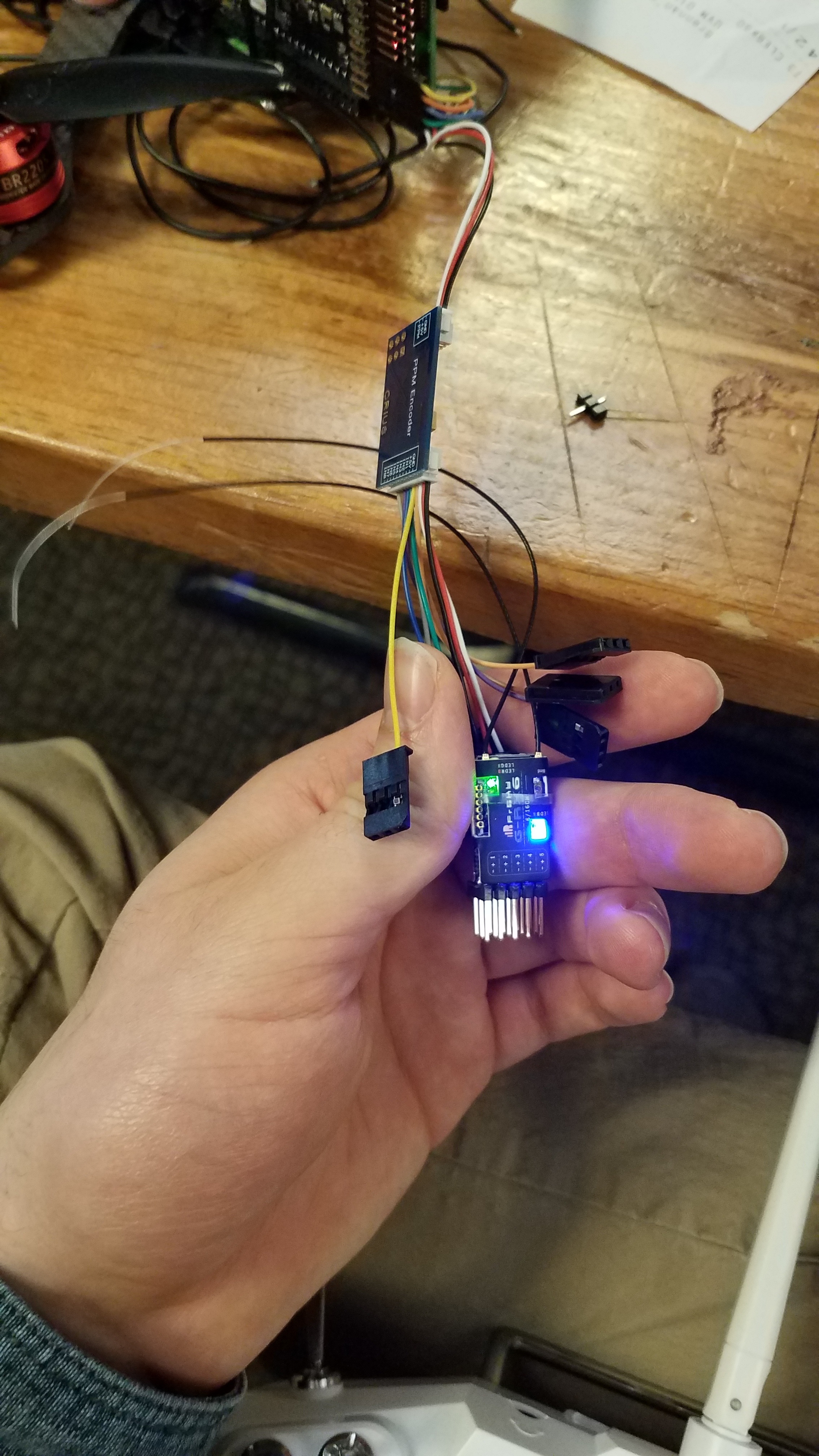

And yes that is a ppm encoder since the receiver outputs pwm.
cat /sys/kernel/rcio/status/alive outputs 1
RCInput.py only ever outputs 899 or 900 even when I move the throttle.
Hi @Lucullus,
Didn’t this receiver support S.Bus output?
I dont think so. Just PWM. That is why I have the ppm encoder.
Actually Maybe.
I found this on the site:
● Number of Channels: 16CH (1-6CH PWM from conventional channel outputs, 1-16CH from SBUS OUT port)
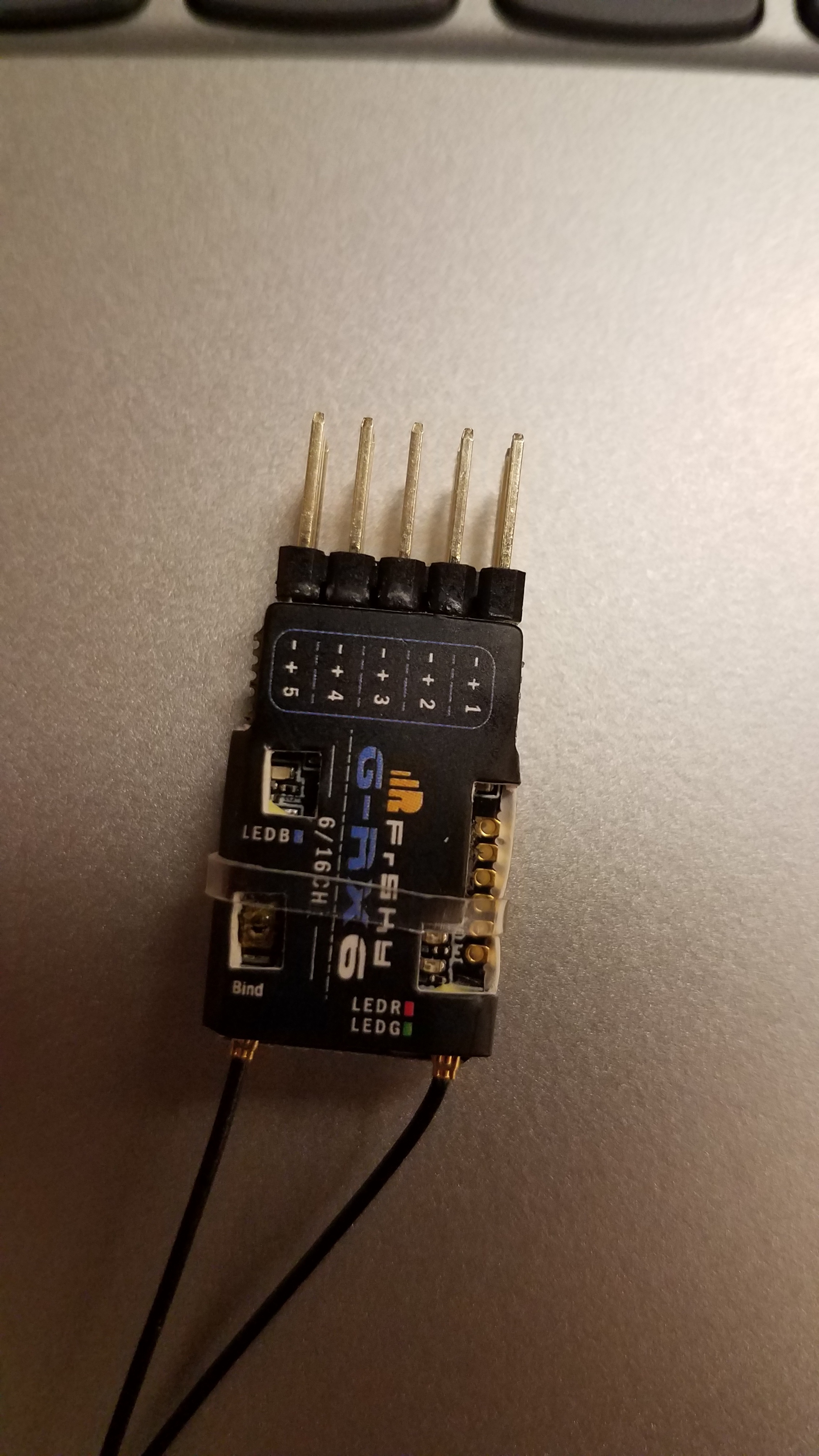
Yes, it does. Here is a close-up. Is there documentation that I could look for this? The one I found is not really helpful for a beginner like me. It doesn’t show how I should plug it in.
Uploading: 20190424_130211.jpg…
So I realized that I screwed up. I think I fixed the issue and plugged in the encoder cables in channel 1 to 5 on the receiver and now RCInput.py changes its values when I move the RIGHT stick (~1000 to ~2000). However, that is the only thing it responds to. Are there any tutorials that I could look at? Most of the ones I found were geared towards pros.
https://www.frsky-rc.com/wp-content/uploads/Downloads/Manual/G-RX6/G-RX6-%20manual.pdf
S-Bus Out is on the right pad of your picture. You have to solder pins on +, -, and S-Bus out.
Marc
but it does respond to input from the right stick. So the ppm encoder is working. It just doesn’t seem to be giving me access to all of the channels. I tried SBUS, but it doesn’t seem to provide enough power to the receiver.
I’d recommend using S.Bus.
May I ask you to clarify this, please? How did you understand it?
I tried again and now it is working, but I have a new problem :(.
This topic was automatically closed 100 days after the last reply. New replies are no longer allowed.