



Hello everyone. I tried to arm my motors, but QGroundControl either says arm: leaning or arm: compass calibration. I already calibrated my compasses so I don’t know why it is doing this.
Hi @Lucullus,
What was the quality of compasses calibration? Does the result of calibration indicate green?
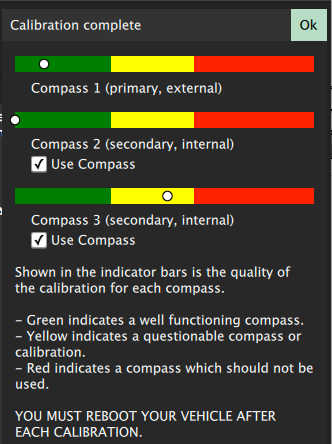
The two compassss were in the green.
When I put the transmitter’s sticks in the position for arming, QGroundControl first says arm: leaning and then occasionally it makes a mention of the compass calibration. I have already recalibrated the compasses multiple times.

Now I get this error too

Hi @Lucullus,
May I ask you to disable all the pre-arm checks (you can do it in the Safety tab) and test whether it changes anything or not?
thanks for your response! I was able to fix it!
1 Like
Could you please advice if I understand correctly that disabling all the pre-arm checks solves the issue with these errors?
May I ask you to tick them again one by one in order to understand which one causes the issue? Please try to arm after enabling each check.
I was actually pretty dumb lol. I had the pi at an angle to make it fit and I just wasnt thinking lol. I moved it and it was able to arm.
1 Like

This topic was automatically closed 100 days after the last reply. New replies are no longer allowed.