



Hmm, still 2 meter difference.
How did you derive your Base Position? I am using the Rinex Header.
Do I need to include the antenna height? That was another question I was having a doubt about. Whether I need to adjust at some point, the height of the equipment off the ground as it was mounted on a tripod…
Rinex header
Base 0.00 m Rover 2.068
Where are you getting all these numbers from? I don’t see any mentioned in this thread?
Didn’t you say earlier you didn’t use any antenna-heights?
Yep, input all relevant antenna-heights for both rover and base (for NTRIP this value is usually 0).
You will need to take the heights into account each time you establish a new traverse-point and when you establish your end-point.
1 Like
The files I shared above were just in processing my base against the NTRIP base thus far.
My base height was set at approximately 89cm
Yep, I could tell from the files.
Ok, you’ve thrown me another curve ball on this one. Could you please go into some detail here on steps?
You must open the rinex file of the base and there is the antenna height of the reference station 0.6060 and the local emlid base is 0.890 meters, I don’t know if it was taken to the antenna phase center
I’ll see if my limited graphics-skill will allow me to make some info-graphics 
1 Like
@JA.WH Please can you upload a base and rover raw data in ubx format?
and give us a height for base and rover in each observation (From A to C).
1 Like
Hello Zinedine,
I can upload the rest of my data. My files were logged in RINEX from the start. I am not aware if there is any benefit to first logging in .ubx and then converting or just logging directly in this format… I just figured to skip the step from the start.
Rover (point B) - height 0m (set on ground):
Base (point B) - height 0m (set on ground):
Rover (point C) - height 89cm (tripod mount)
Had to make available through dropbox as the files are too large. Thanks.
Remember to elevate the antenna, preferably above head-height, and for this purpose, preferably on a tripod+tribrach. This will give you a better SNR, and allow you to position the unit more precisely.
You will need to minimize all sources of errors.
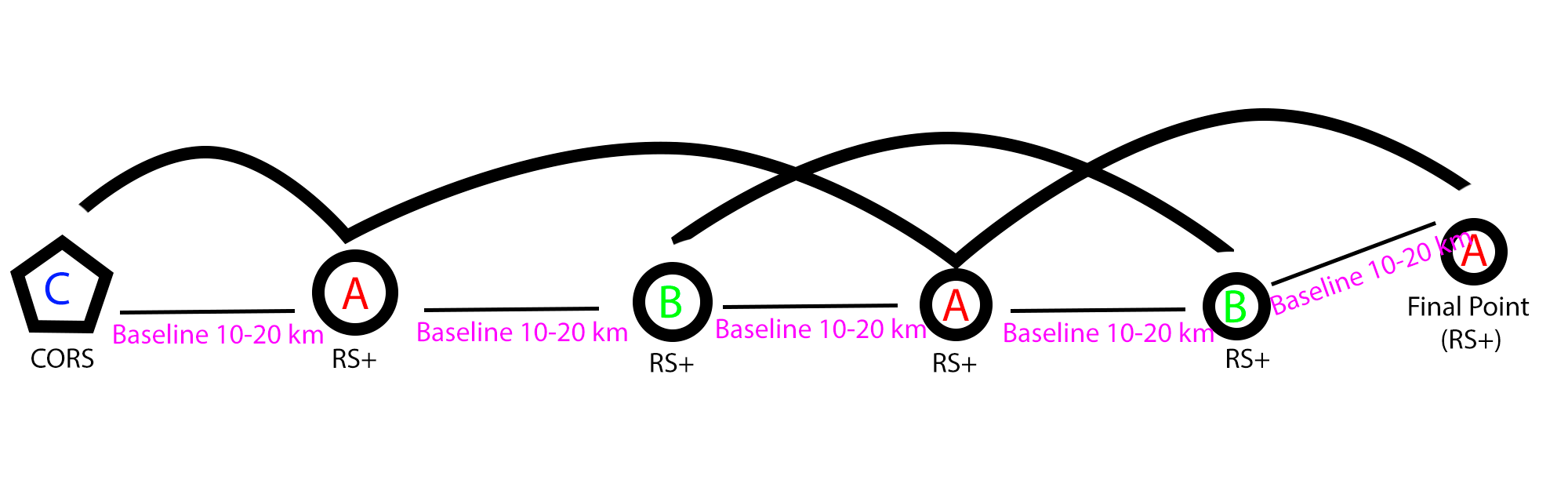
Also, if you look at my illustration, I recommend that you leave the unit on the position until you are done collecting the next point in line. That minimizes the potential for setup-error.
2 Likes
So because of being way too curious, I couldn’t help trying to calculate the traverse result:
Point C
Lat: -22.141580503 S
Long: -44.791578998 W
Alt: 1186.9109 m
Combined StdDev (taking into account the 3 separate baselines and the initial equipment std-dev):
Horizontal: 0,0555 meters
Vertical: 0,111 meters
That should be within PPP can do with long obs-times, so that might be a better option.
For your 0 cm ground values, I have used +0.065 m for the RS+ antenna height. For point C I have used 0.89+0.065 m as antenna-height.
More elevation, especially on A and B would really have helped in getting a more trustworthy solution. Was really struggling to get a proper fix with the provided data.
1 Like
| UTM South | Zone 23 | WGS84 | ||||
|---|---|---|---|---|---|---|
| Name | Grid Easting (m) | Grid Northing (m) | Elevation (m) | Latitude | Longitude | |
| MGIT | 453420.919 | 7521441.875 | 854.000 | -22.412517219 | -45.452573780 | |
| A | 473018.809 | 7544741.131 | 1014.421 | -22.202449704 | -45.261765364 | 30.45 Km |
| B | 494436.138 | 7553283.023 | 907.183 | -22.125480448 | -45.053950089 | 23.07 Km |
| C | 521492.009 | 7551487.218 | 1186.391 | -22.141580317 | -44.791578963 | 27.13 Km |
For Rover you can set update rate to 1 Hz (1 sec is enough) in static mode.
1 Like
Am I correct in assuming you haven’t used the Cors base height of 0.606? If I add that height to your Point C height, our results are within 5 cm of each other.
1 Like
By adding some remarks in relation to the advice recommended by @wizprod
the horizontal positioning error that for a single-frequency receiver is static is 5 mm + 1 ppm (and double for vertical positioning) is this under the best conditions, so for a baseline of 30 km horizontal positioning error is 5 mm + 30 mm (3.5 cm) for 23 km the positioning error is 2.8 cm and finally for the baseline of 27 km the horizontal positioning error is 3.2 cm knowing that these positioning errors accumulate we can say that the precision is decimetric.
for a single frequency
You can either use PPP as suggested by @wizprod (the error is also decimetric).
the ideal is to use a dual-frequency receiver so you can compare the result also knowing that the theoretical positioning error is 4 mm + 0.5 ppm, in your case for a baseline of 75 km is 4.15 cm .
For best results you can use PPP with dual frequency.
Finally for a single frequency the recommended baseline length is 20 km maximum, 30 km is above the limits.
2 Likes