Hello,
I am currently trying a PPK workflow with (x2) Reach RS+ to translocate a point from a distant base station (~77km) to my home location to set a benchmark and for setting out GCPs for UAV mapping. I am seeking some help now in analyzing the data, and wondering where I go from here in further processing this data.
To maintain a reasonable baseline to assure cm accuracy needed for GCPs, we placed the reach base 30.5km from the reference base station. The reach rover we placed another 23.5km away in the next closest town. We recorded logs on both base and rover for 2h. We repeated this process from the last rover location to our home location over a 28km distance at a later date.
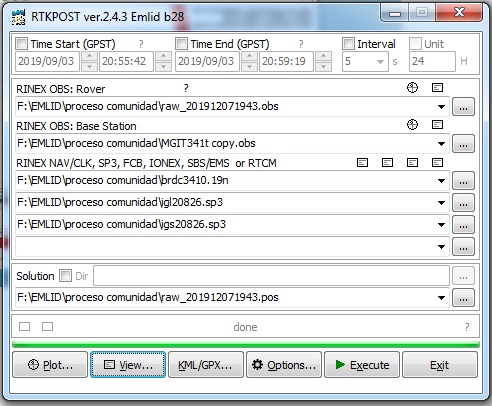
As my logs were already in RINEX format, I went straight to RTKPost. The first time I processed that data, I had done it in Kinematic and the results were as such:
I unfortunately didn’t screen shot the parameters I entered to get these results. I have since processed this data a few other ways and haven’t been able to come back to the same results. Having read through some other forum posts, I understood that since my rover was stationary, it is best to process in Static mode, which I subsequently did.
However I also got some interesting results in Kinematic. I’m just not quite sure how to interpret this information.
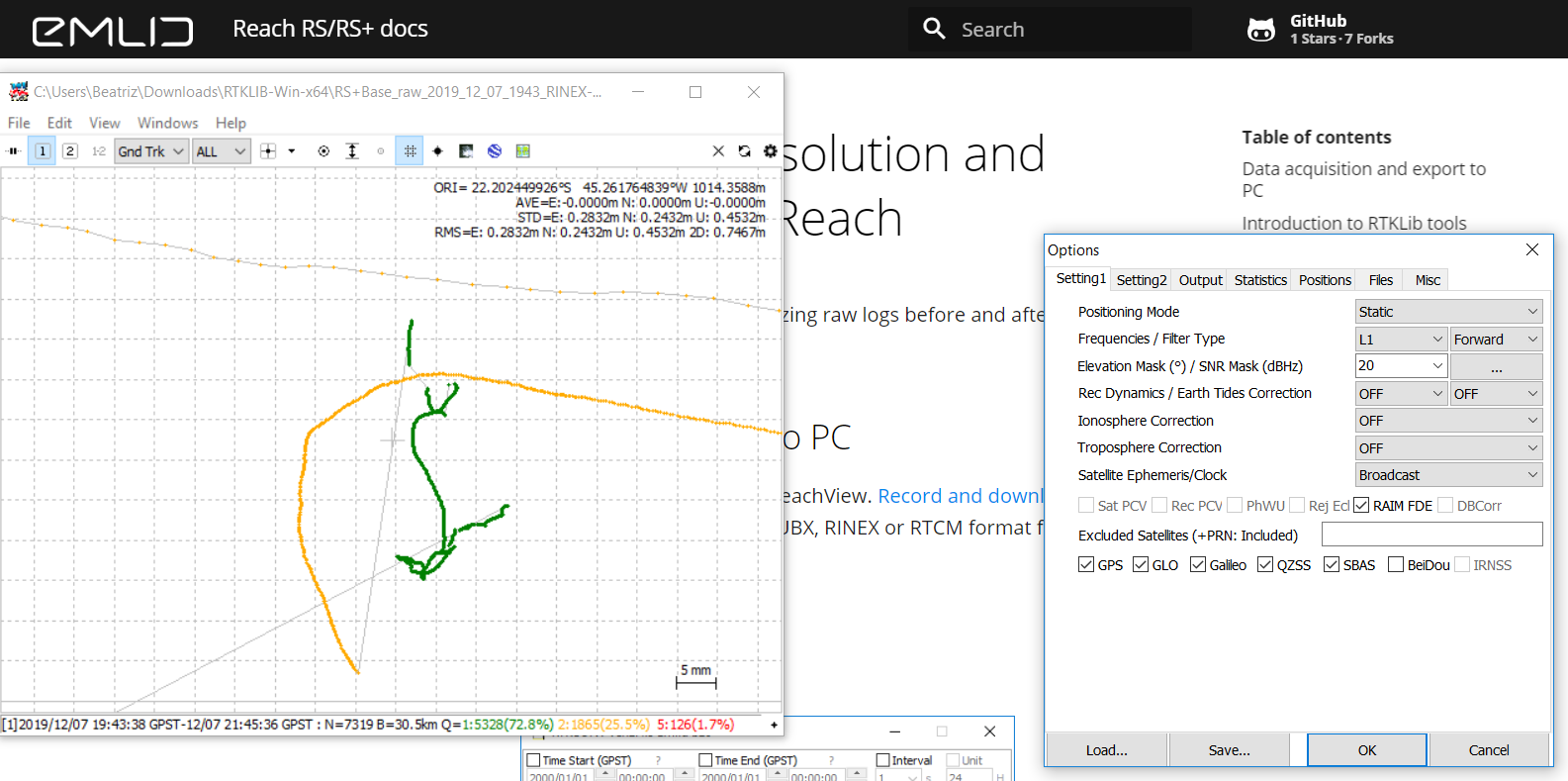
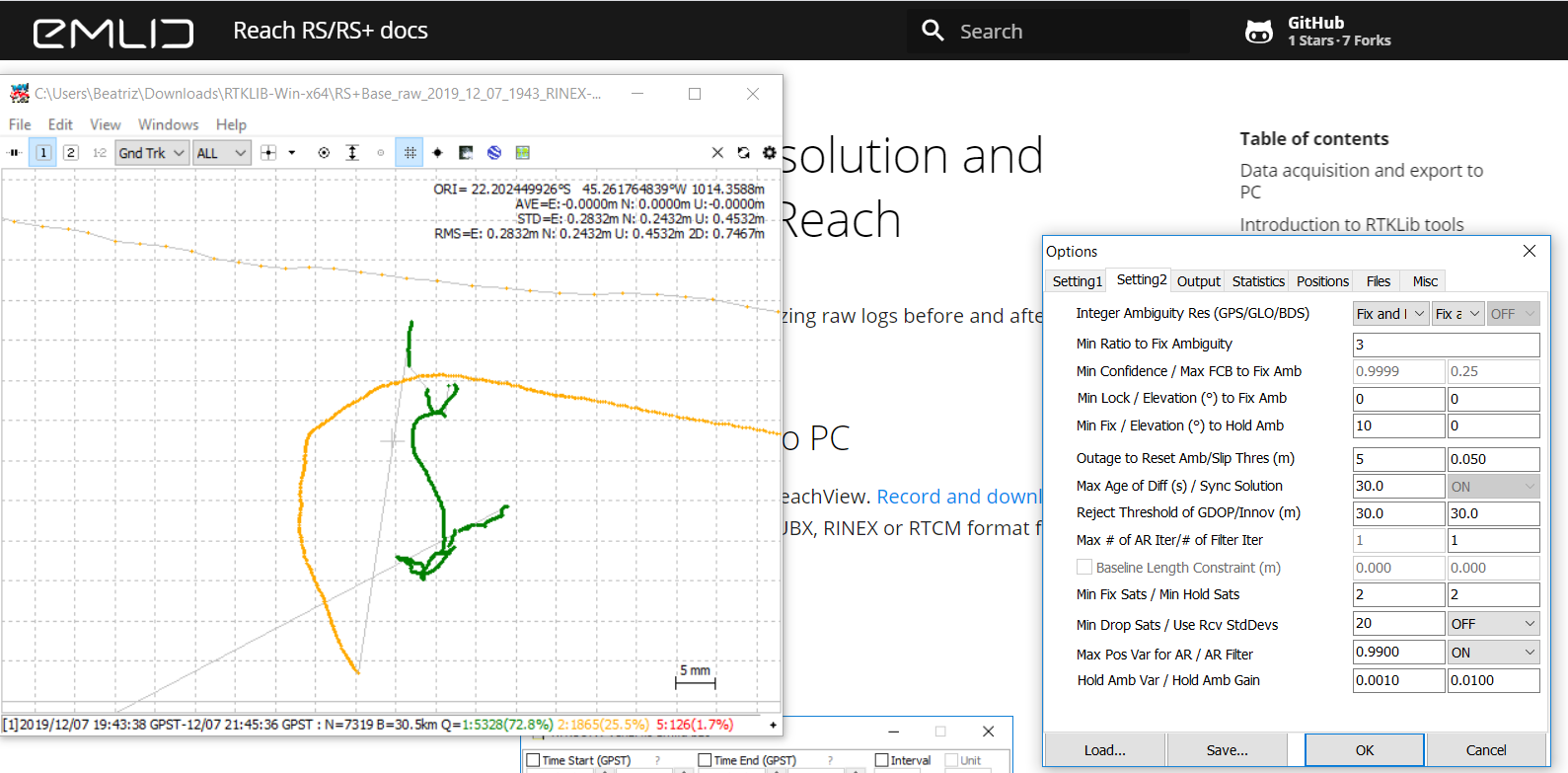
I will post here screenshots of the ways in which I processed this data in Kinematic and Static.
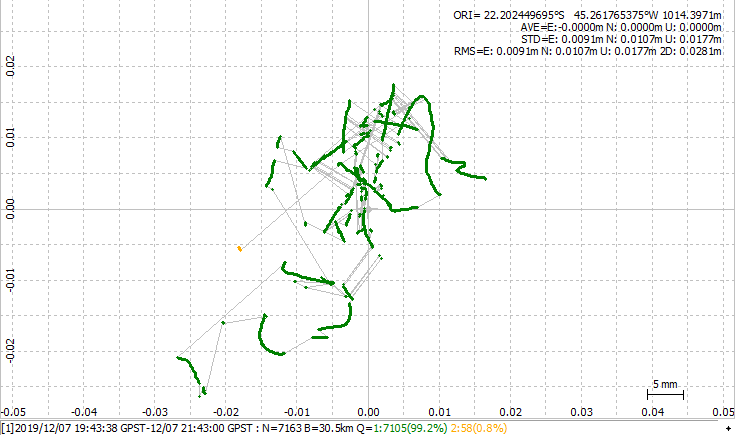
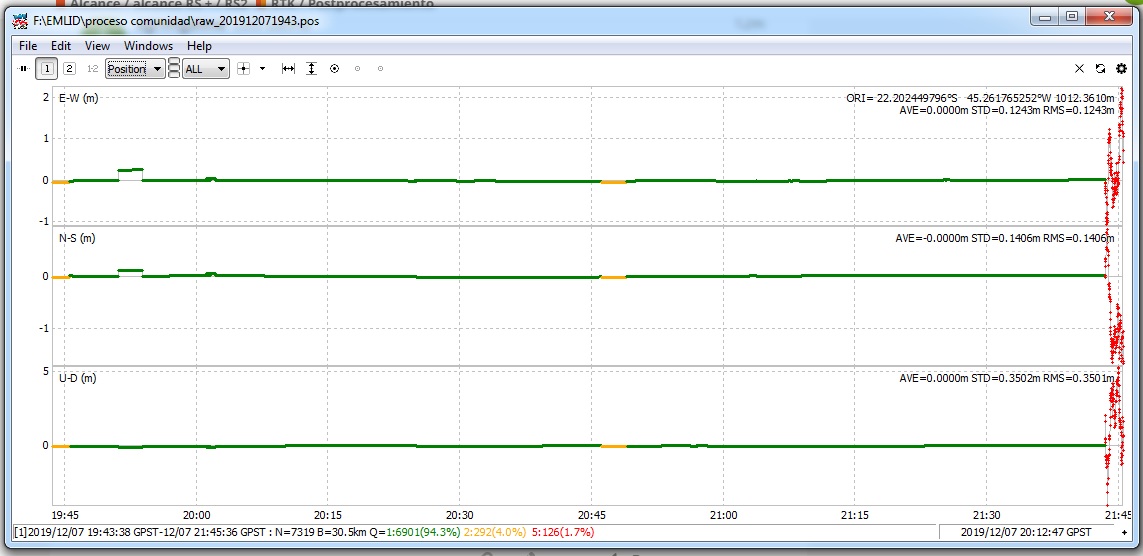
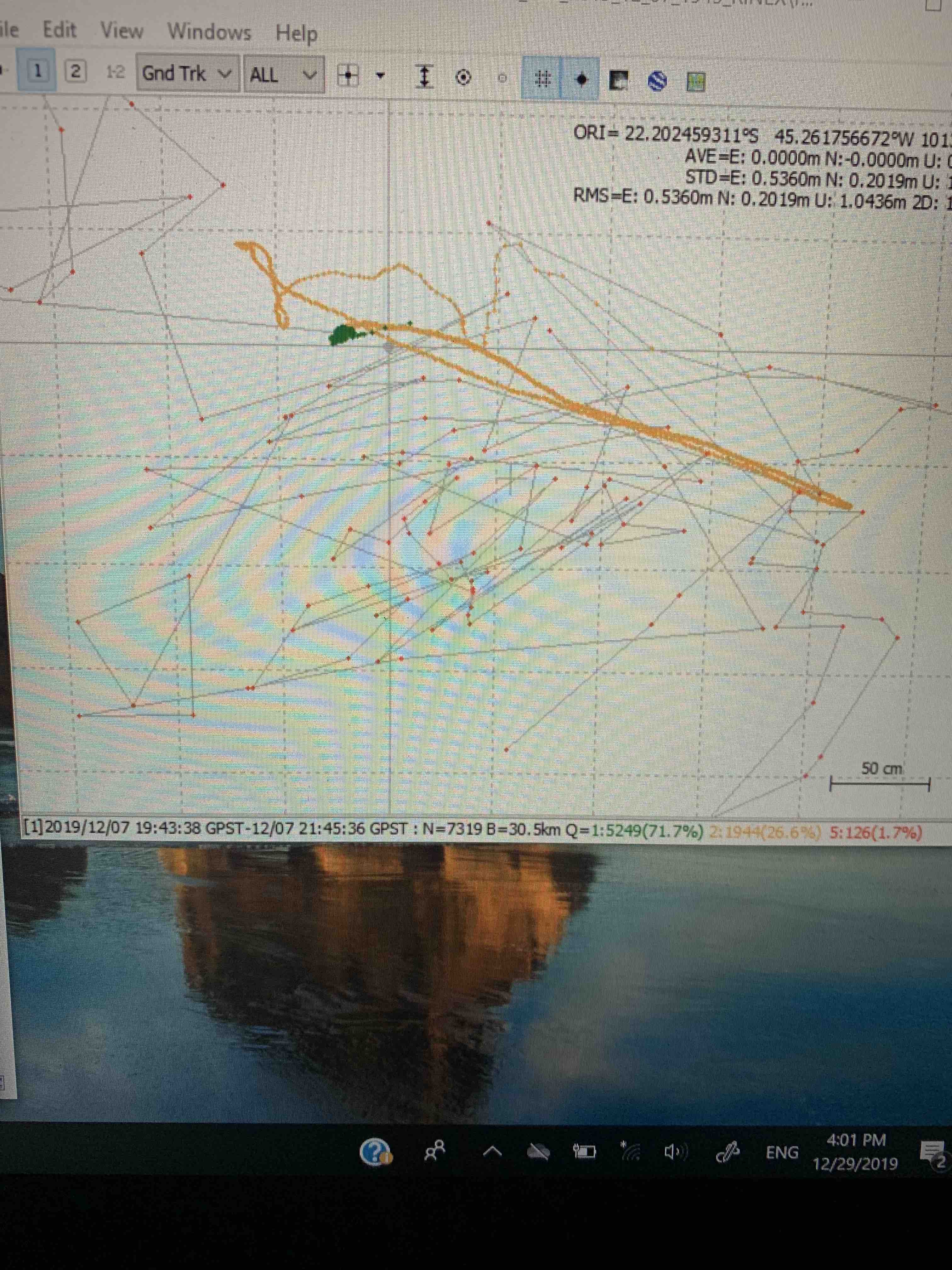
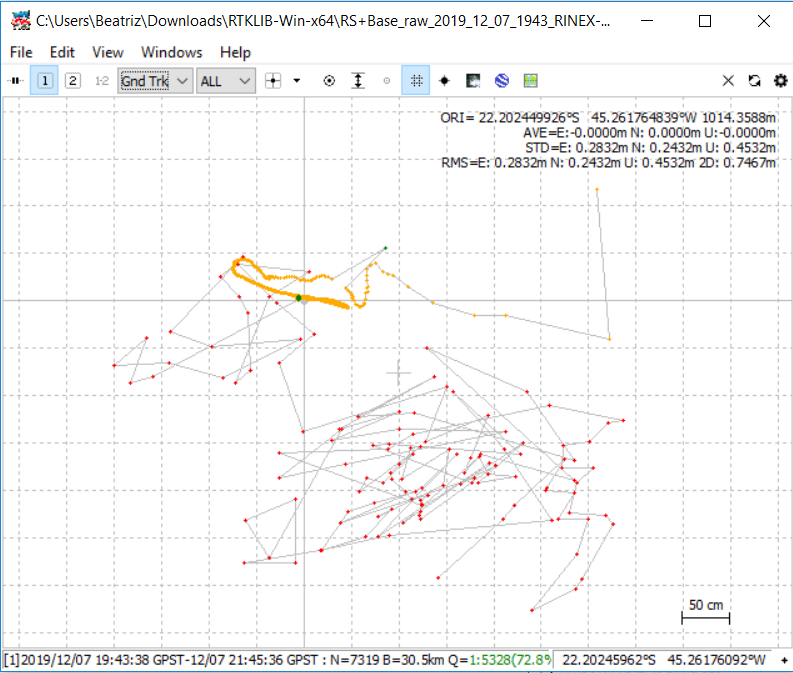
Kinematic:
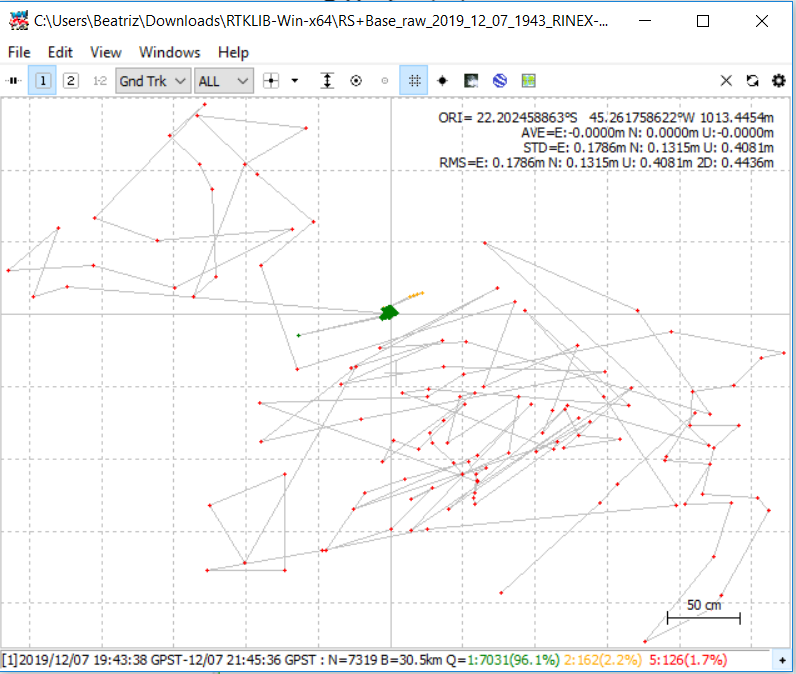
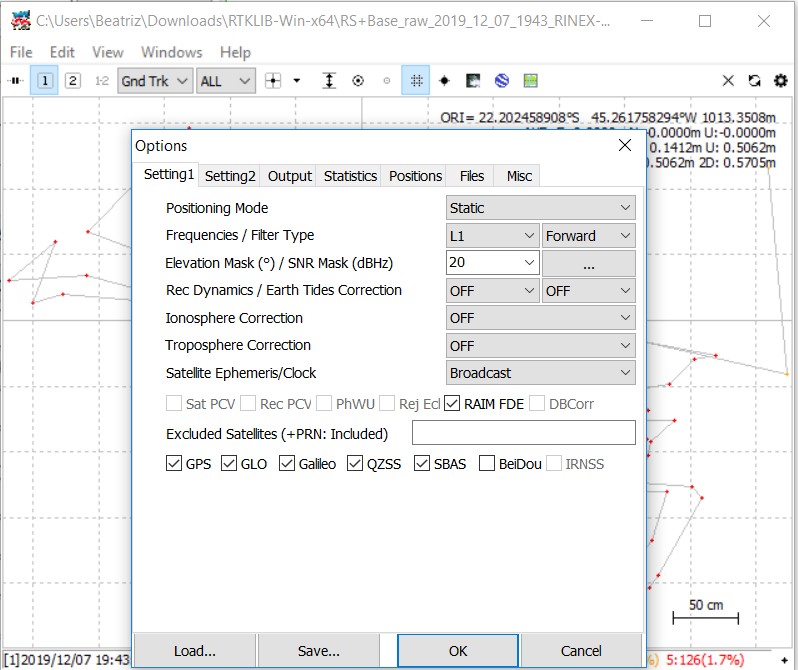
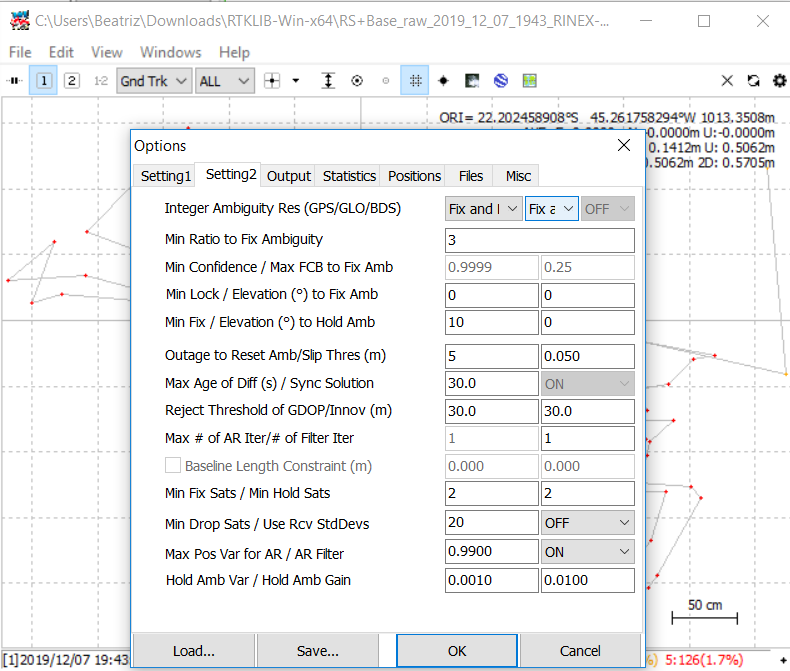
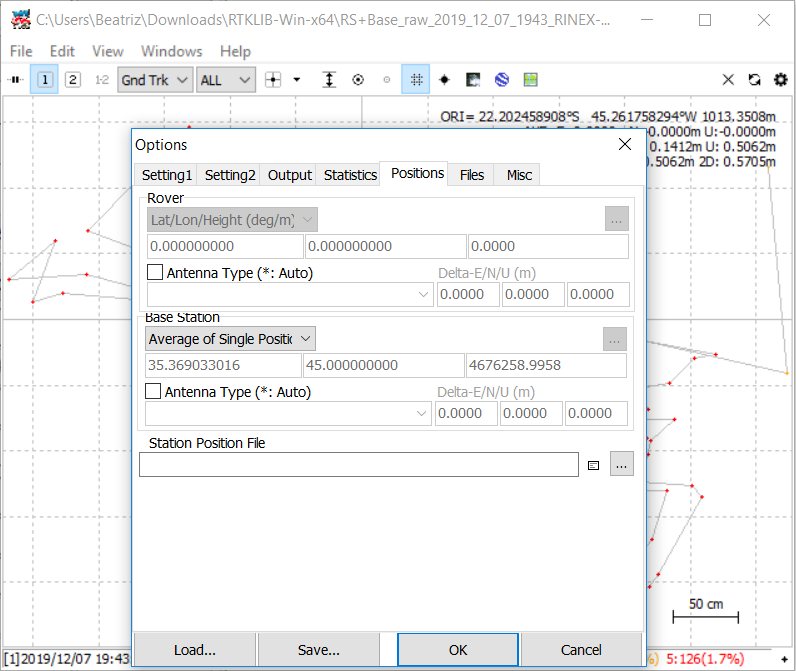
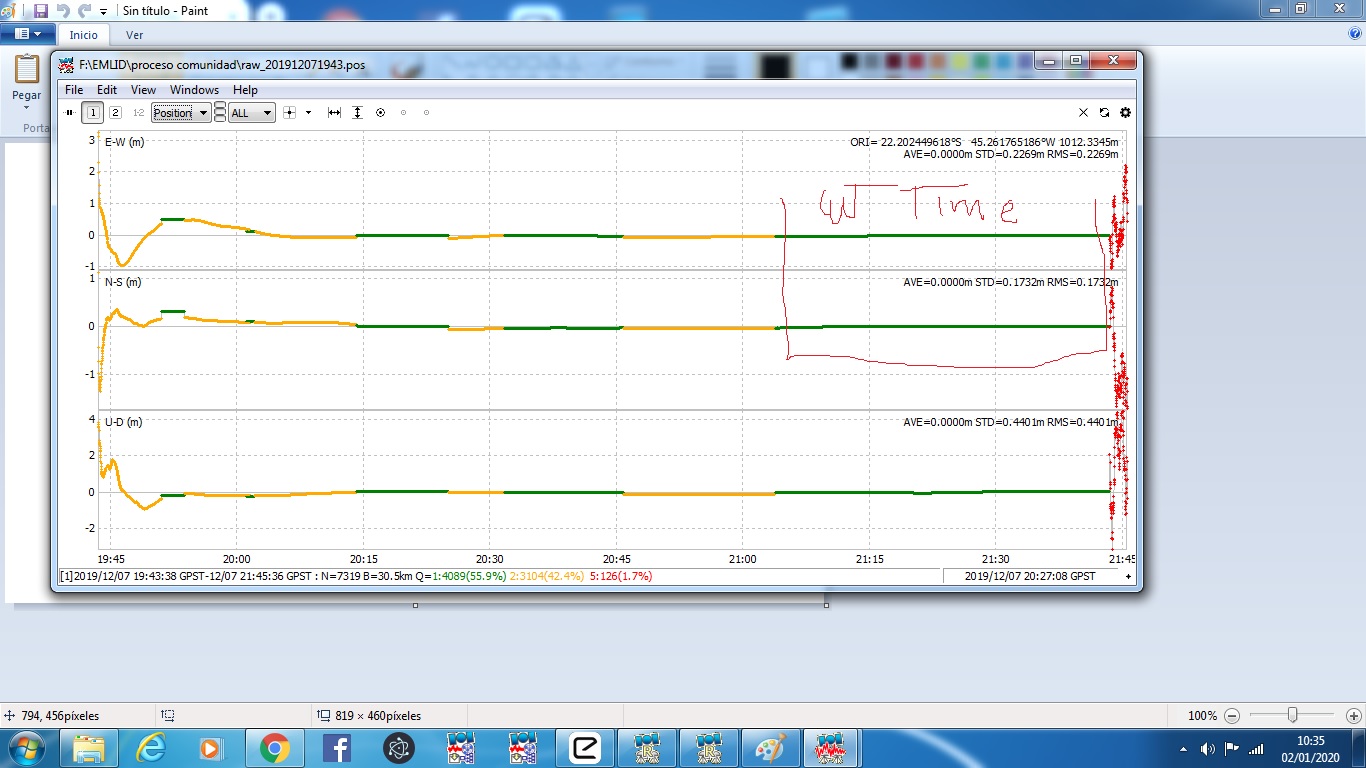
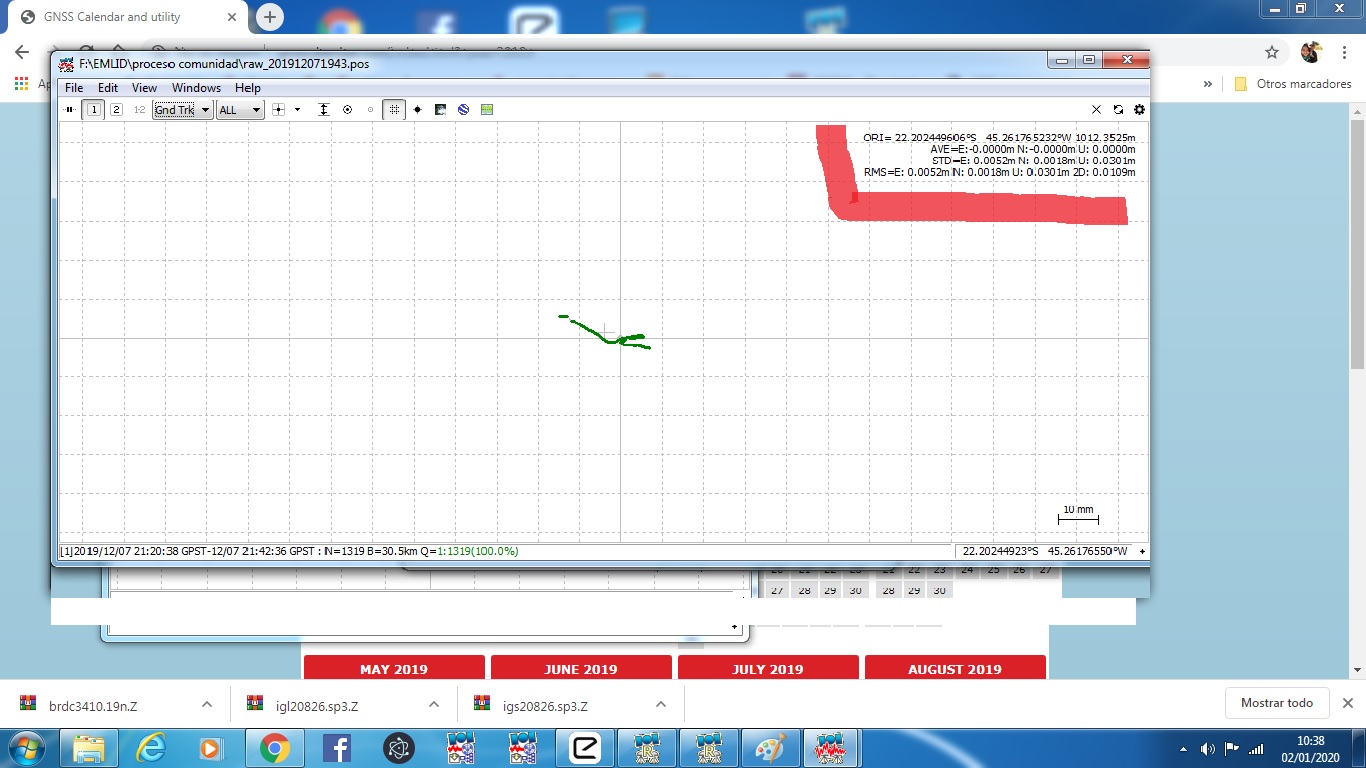
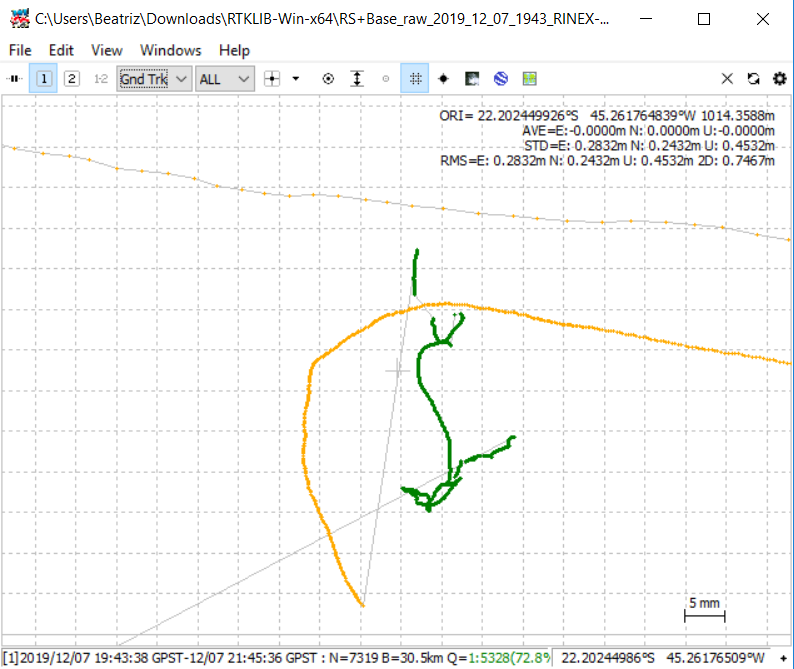
Static:
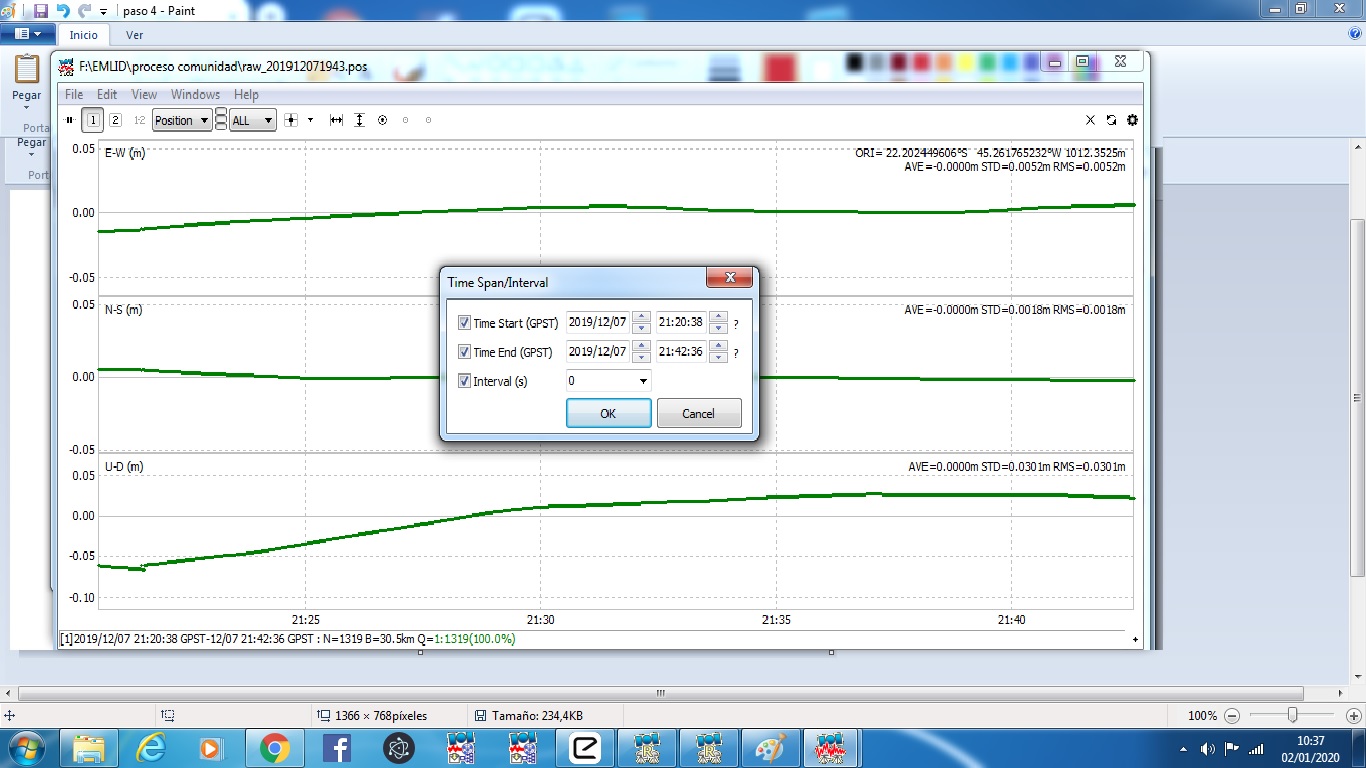
(Enlarged Q=1)
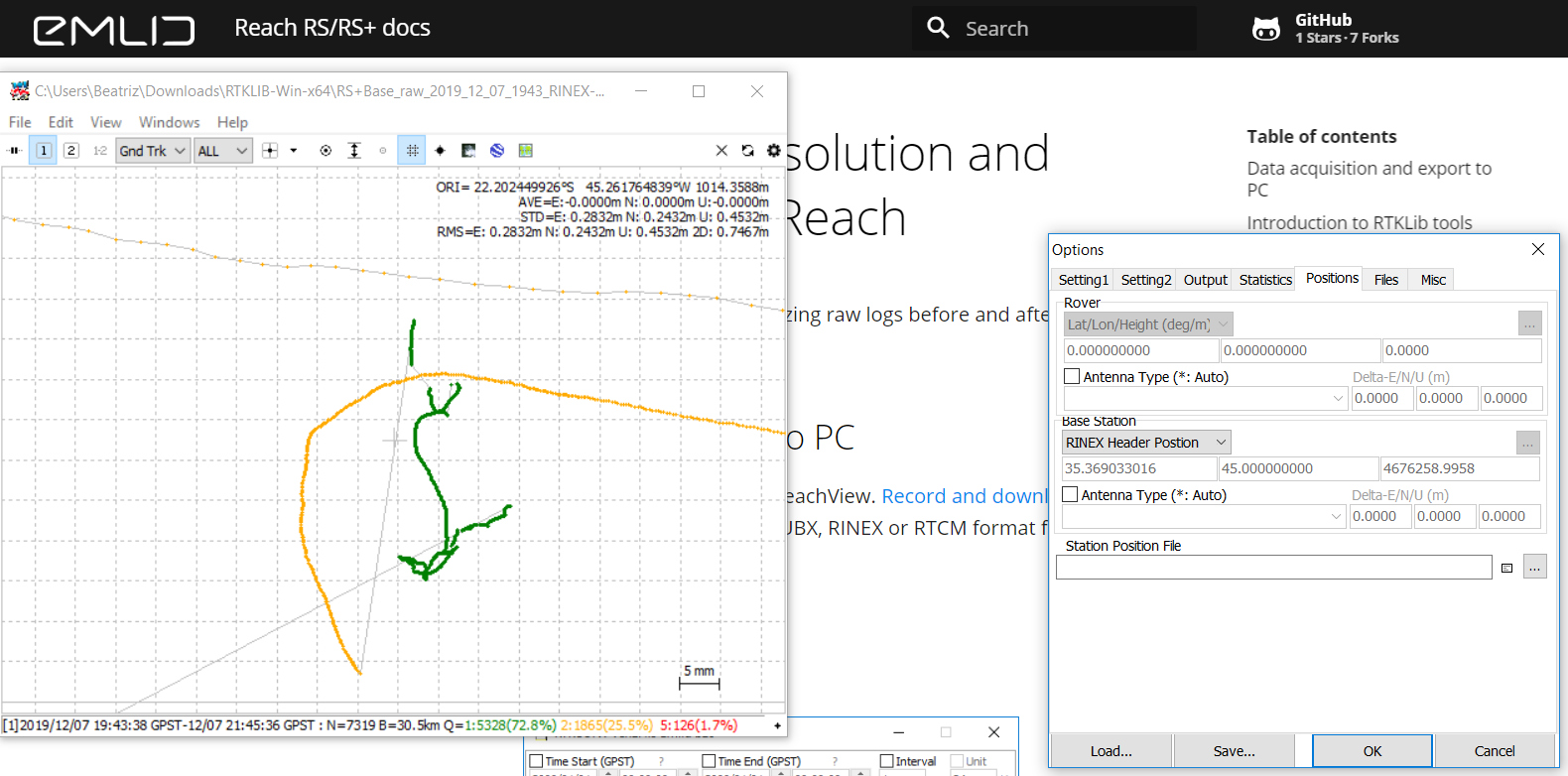
These appear to be my best results perhaps?
I suppose my current doubts are, the Q=1 fix solution shows a spread path over a distance of up to 30cm (in static), is this my actual accuracy or is a point averaged from this solution as my output? Glad to share my .obs/.nav here. Do I need to further process this data?
Furthermore, I am a little stuck as to what data I should plug into RTKPost for the second half of my workflow between the last rover position and home locale. Would I use the .pos file that is the output from processing base corrected to the reference station? That seems the logical route to me if I want the home position to align up with the corrected base position…
Lastly, I suppose I am a bit lost after performing the PPK process, how to proceed in making use of this data for my workflow purposes.
Any help and advice is greatly appreciated, thank you.
P.S. I am including you @tatiana.andreeva in my inquiry as you’ve been a great help in getting me to this point! thanks!