So I’ve successfully networked my Reach Rover into my Lowrance HDS via my AT10 converter but now it seems the connection is intermittent and the source is winking in and out per the video here - https://photos.app.goo.gl/Cm5JuLqEWJqCGhys8
Has anyone ever seen this and know what might be causing it? The rover was set to log NMEA and all communications links between the Rover, Base, and the App were working as outlined in the Reach quickstart guides.
On the NMEA0183 network end, I just spliced the talker/listener and ground wires with crimped connectors and tape. Not a professional job, but I think if the splice job was too crappy, it wouldn’t work at all. My problem is is that it’s kind of working…
Hmm, have not seen this behavior before.
Is this 1hz nmea adapter version?
do you get any position out on your Lowrance with Reach connected?
What is your network layout, NMEA0183 or mixed with NMEA2000?
What is baud rate set to? (from Reach)
Yes I’m pretty sure this is the 1hz AT10 that I acquired based on the feedback from a long-time Navico commercial sales rep who was part of the original move by NMEA to the 2000 protocol back in the day (see
. Apparently, this part has been more reliable than the 10hz AT10 part. But if the 10hz AT10 has worked for you, maybe I should look into trying that. Still, I’m not sure if that is the difference here…
As you can see with the video (on the bottom of the screen) position comes in and out every several seconds but the interval is variable.
Not sure I understand your question about the network layout. Everything I currently have networked is all NMEA2000, except for Reach and that is being converted from 0183 to 2000. Baud rate on Reach is 4800
Would be a lot easier if the GPS industry started to move to the NMEA2000 protocol and ditched 0183!
1hz should work too. But i would try different baud rates on Reach. Also make sure Reach has at least Single solution output (reachview shows you a position in the status menu).
If RTK mode on Reach is set to high, use a lower Hz. E.g 1Hz. Or vice versa
Thanks TB. I also will see what Emlid has to say. I had Float for the solution. I’ll try the different baud and RTK rates. I’ll keep the community posted.
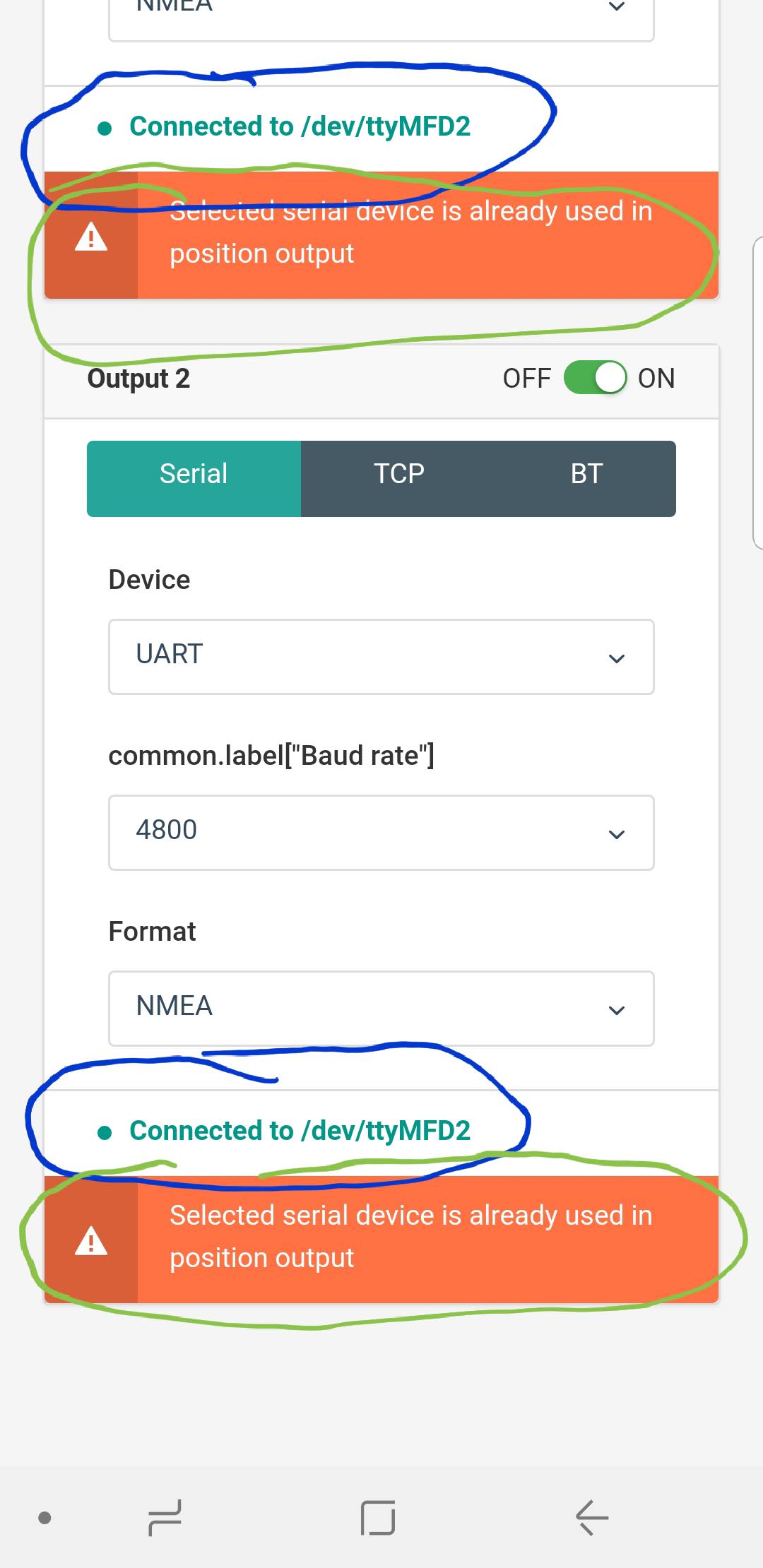
Ok, I think I figured the position feed issue (hopefully). After a lot of pushing buttons on the app while watching my Lowrance GPS Source screen, I determined that Output 2 must be sending NMEA positions at a baud rate of 4800. When Output 1 was selected alone with not Output 2 specified, I was getting the intermittent positions.
Is /dev/ttyMFD2 the name for the networked device (in this case my Lowrance)? If so, why would both Output 1 and Output 2 need to be specified?
I also noticed some other weirdness when bouncing between wi-fi and the rover hotspot on the app. At times when bouncing between connections, I would notice the AT10 and corresponding NMEA positions would respond precisely when certain wifi or hotspot connections were made/lost. Could the communication of positions to the app be interfering with output to the AT10?
You only neef one output enabled and specified.
I would try getting one output solution correct and then see if you still have issues. Multiple output may cause conflict, so turn off what you don’t need
Interesting. Couple of questions. First, were you getting WAAS or EGNOS correction with the Simrad GPS? What was the estimate of precision error (EPE) on the Simrad? That will affect the accuracy of the Simrad waypoint.
Second, how far away was your Reach base station? I presume it was viewing a pristine open sky with zero obstructions in the sky or between the base and rover? Thus far, this appears to be the most difficult thing (no obstructions) to achieve with this RTK solution for use in waterbodies. Waterbodies are often down in a valley and tree lined and thus difficult to establish good base positions and is difficult to get an obstructed view of the base over the whole waterbody.
I had it enabled but not sure if it took advantage of it.
I cant tell for sure, just notice the plot was not right. There was no error estimate visible at the moment. Not sure if there is ono on my plotter, need to check.
I can only input coordinates with metere accuracy. lat lon dec like this 0,12345
I also suspect meter value is best accuracy for UTM too. Can check this next time.
About 600m from base. Used my own located nearby.
I have elevation mask at 15 for both. At this angle and below most of the obstruction is located.
Are you cutting the plug off the AT10HD and the RS Serial cable and splicing them together? - I have ordered a Reach+ and parts described in this post. Hoping to get this going soon. Thank you for your help
Hi,
The AT10 and RS serial came without the plug. I just solder them together.
But if the plug is there, you can cut it of course (I did it with the HD version)
Here is the spec for th AT10HD adapter. Just a heads up regarding the 10Hz to smooth out the direction as it directs to the heading e.g with MARPA overlay . Hence is does not update the position with 10Hz.
You would be fine with AT10 version too. For Survey mapping you would drive slow so it should keep up the pace.
In this YT clip you can see one blue (high precision compass) and one black (GPS heading) derived from the boat icon on the plotter.
With the 10HD adapter and the appropriate system you would have a faster update rate on the black line vs a slow one with 1Hz. This is specially true with MARPA overlay and using RADAR