I have been working on a project lately. To implement ReachRS to exisiting navigation system onboard.
My boat is configurated with:
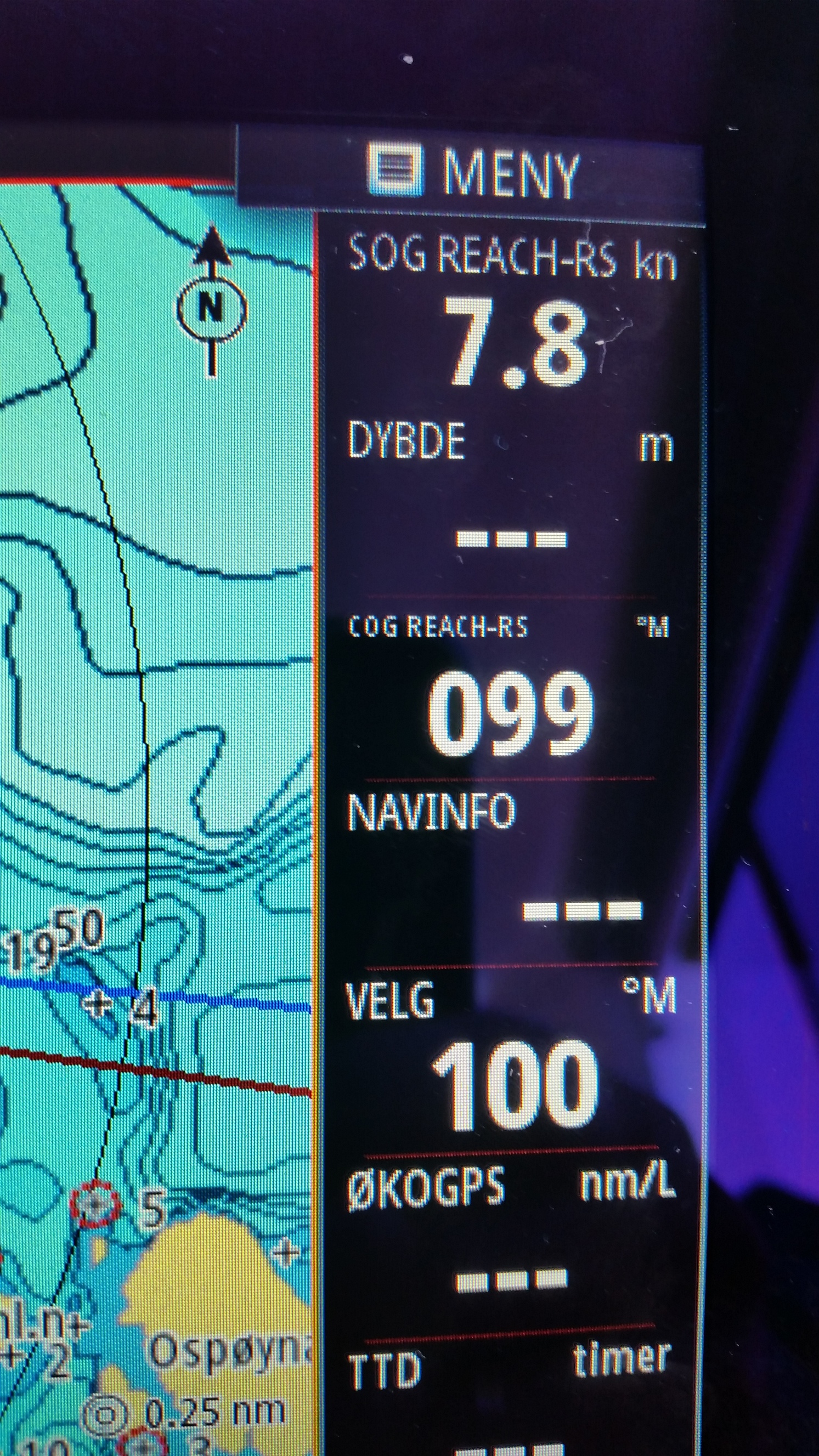
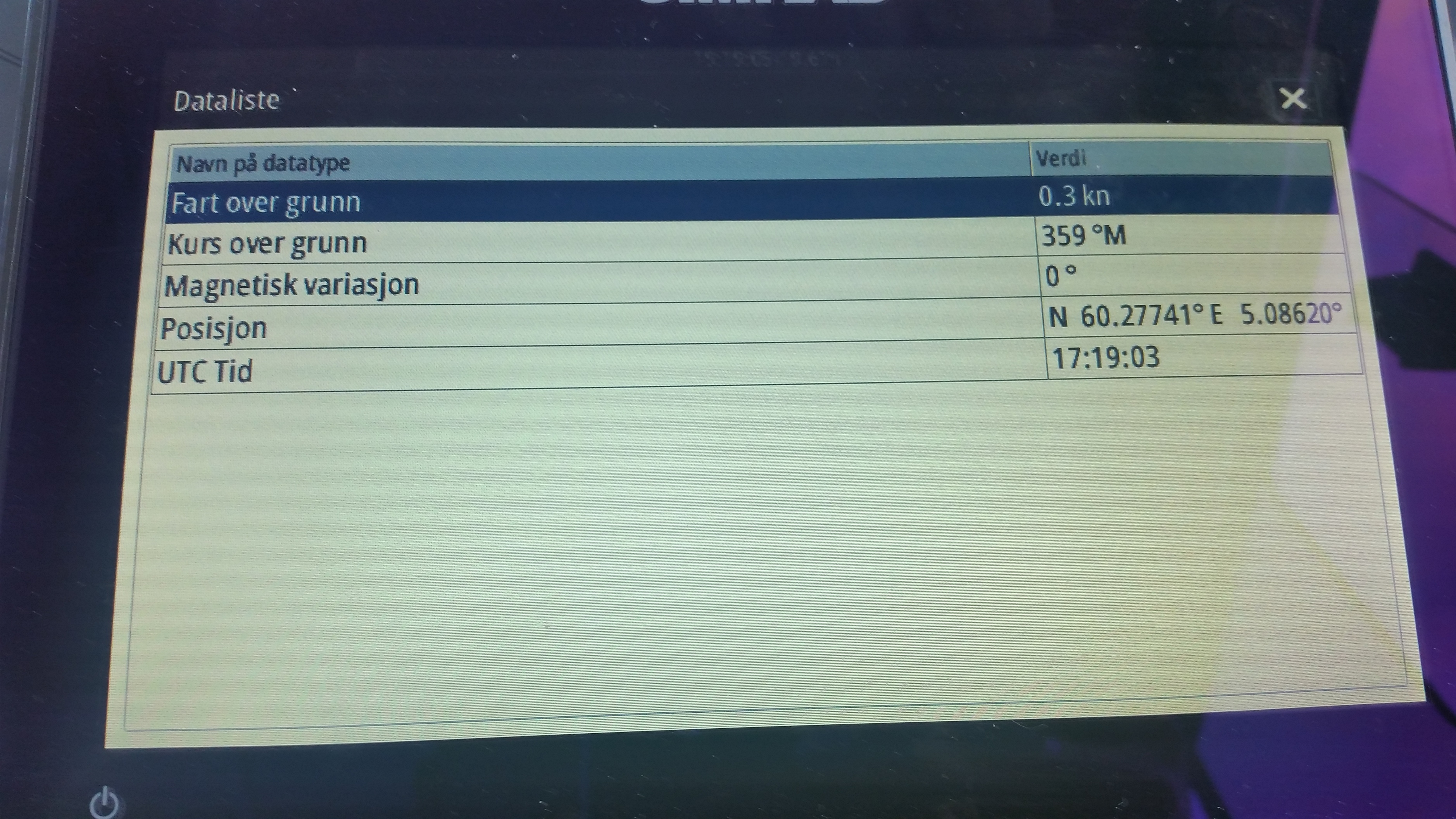
Simrad GO9 XSE
Simrad 3G radar
Simrad NMEA2000 backbone with NMEA0183 adapter and AT10 converter for serial connection to ReachRS
Simrad Precision-9 Compass
Simrad totalscan structur
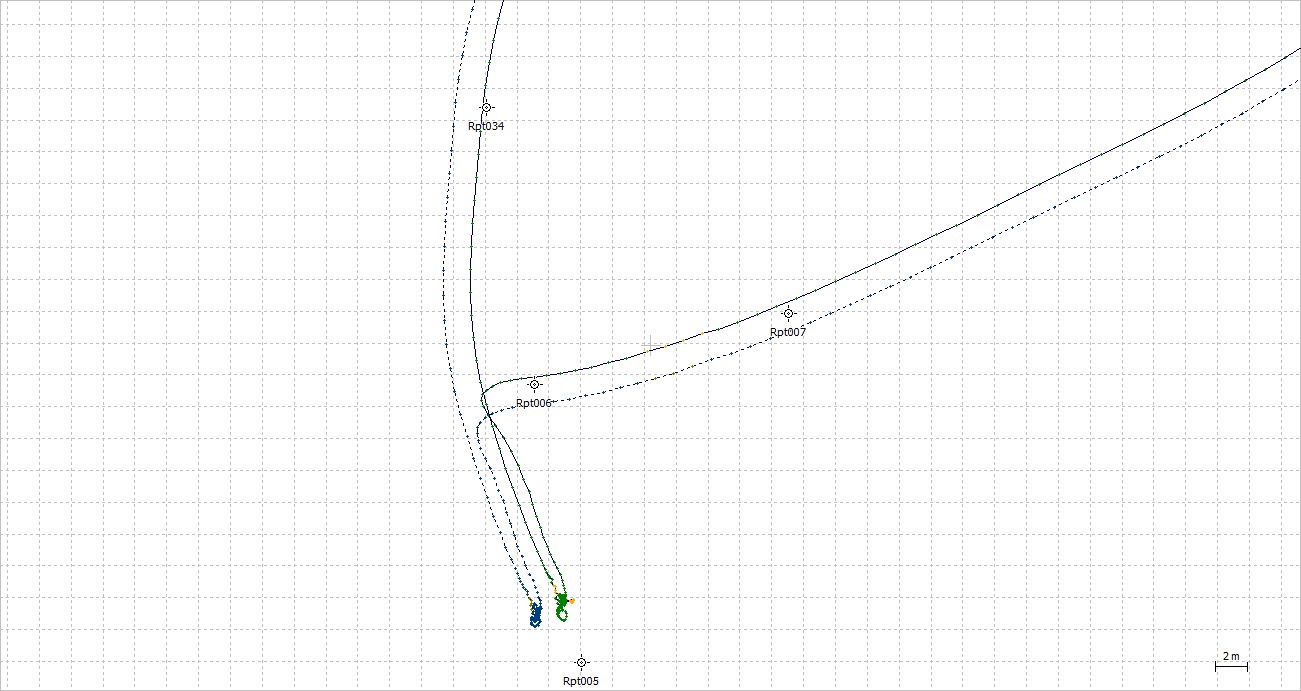
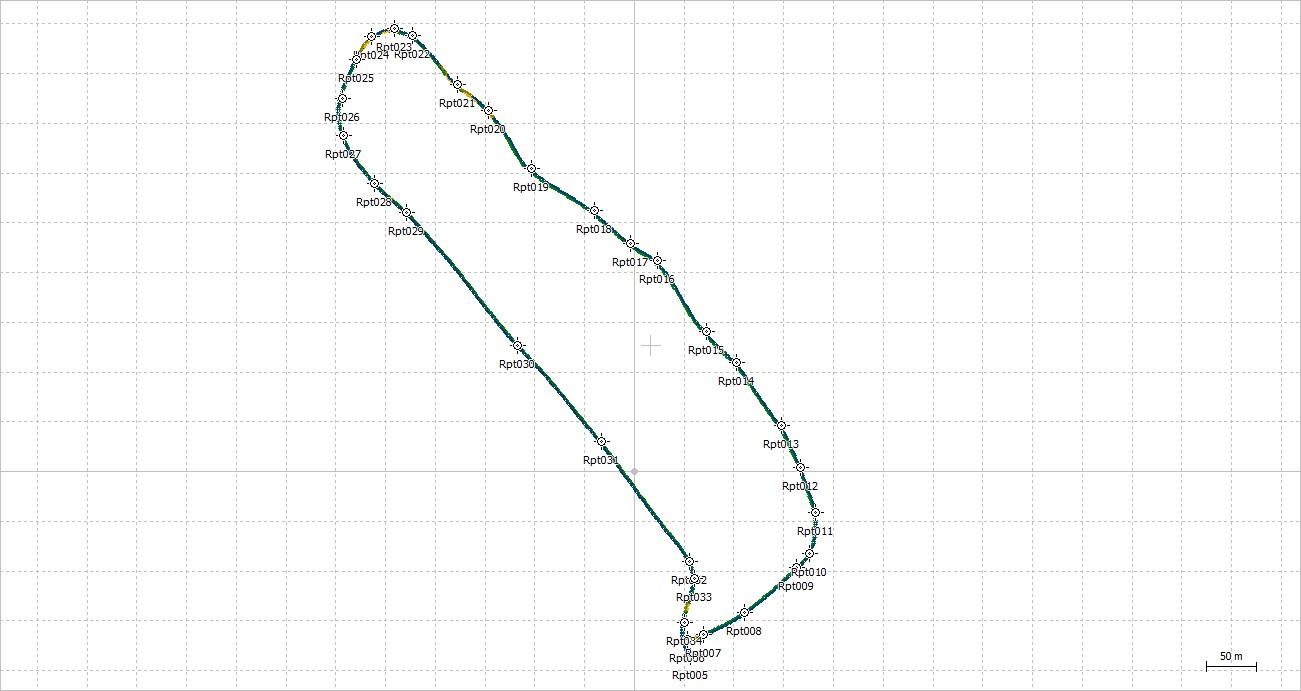
GO9 has buildt in 10Hz Gps, but from reading done against ReachRS, its has some large deviation from origin.
Spooky when one trust it to place the boat on the map and not make you run your boat onto nearest submergd rock
Will post a youtube clip later showing live track from 2reach units and one simrad track log.
I like how there is no messing about. Reverse straight back and then full throttle turn and go, and high speed until the last second before docking straight in.
Yes, but that was in ancient times. If I do send a Reach module into the sky, it would more likely be with a Navio2 guiding it like most others in this forum.
I have one minor issue i need to sort out.
The .sl2 and .sl3 files produced by simrad/lowrance structurscan/tranducer modul is somewhat hard to make readable. Got a Ruby script but not sure i trust it for this kind of level.
Would be thankful if anybody got an idea to quality check this Rubyscript or have a another way around this