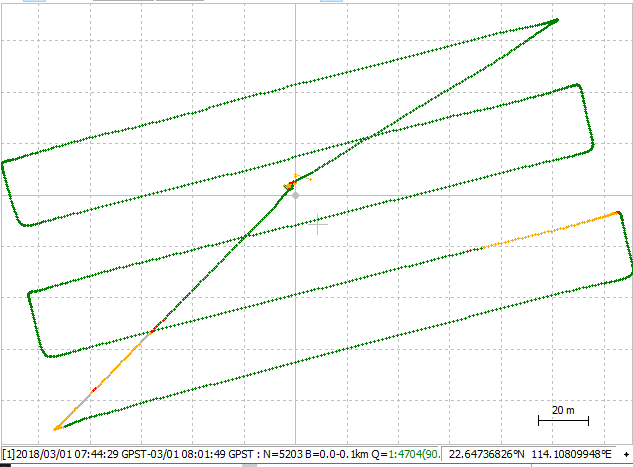
This module has been tested many times in recent days, and the data processed are not entirely green. there are points where Q = 1, Q = 2, and Q = 5. The following is a set of data I can provide, please help analyze. I always want to know what is the reason, thank you!base123raw_201803010647_UBX.zip (7.5 MB) 1raw_201803010649_UBX.zip (3.5 MB)
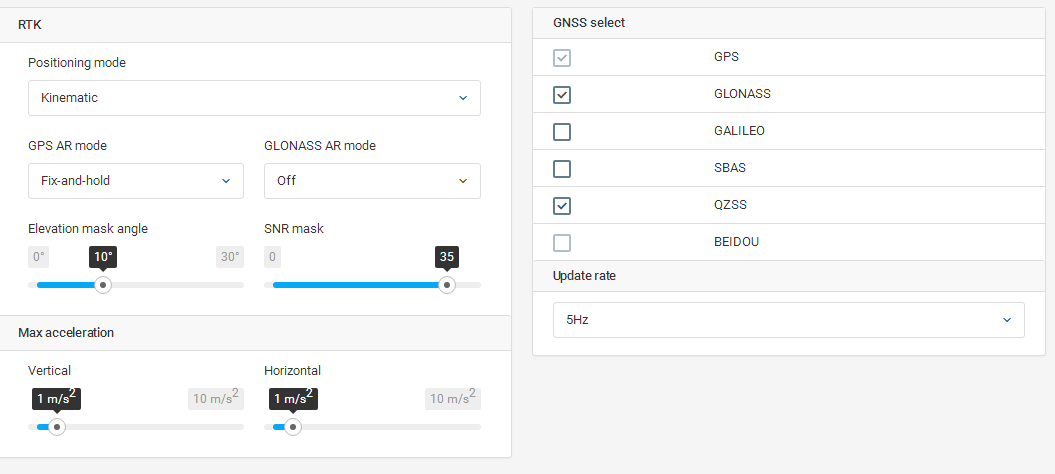
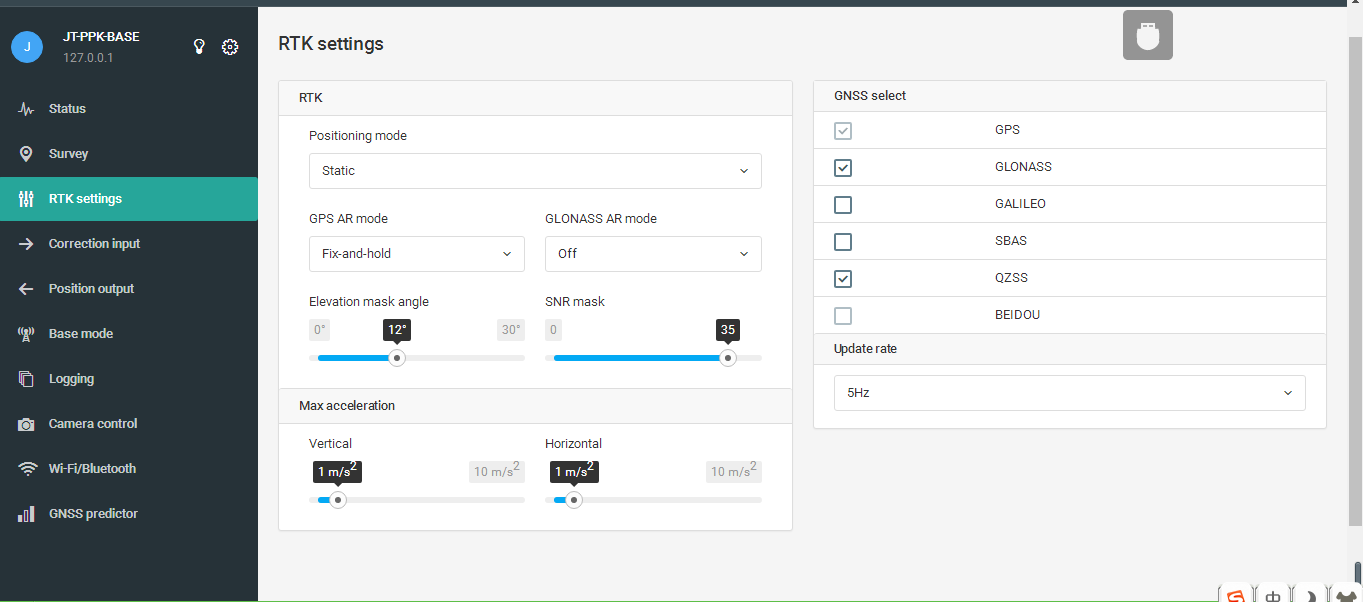
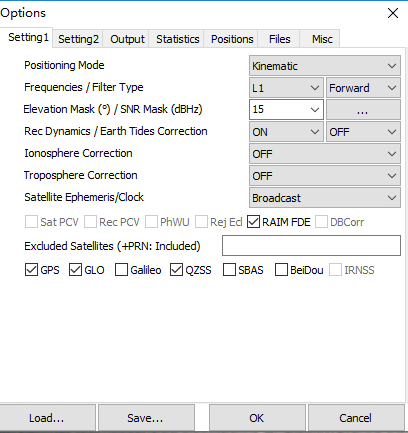
I would retry post-processing with Elevation mask reduced to 5, or even zero. Elevation mask is useful for on-ground operations. It significantly reduces skyview for aircrafts.
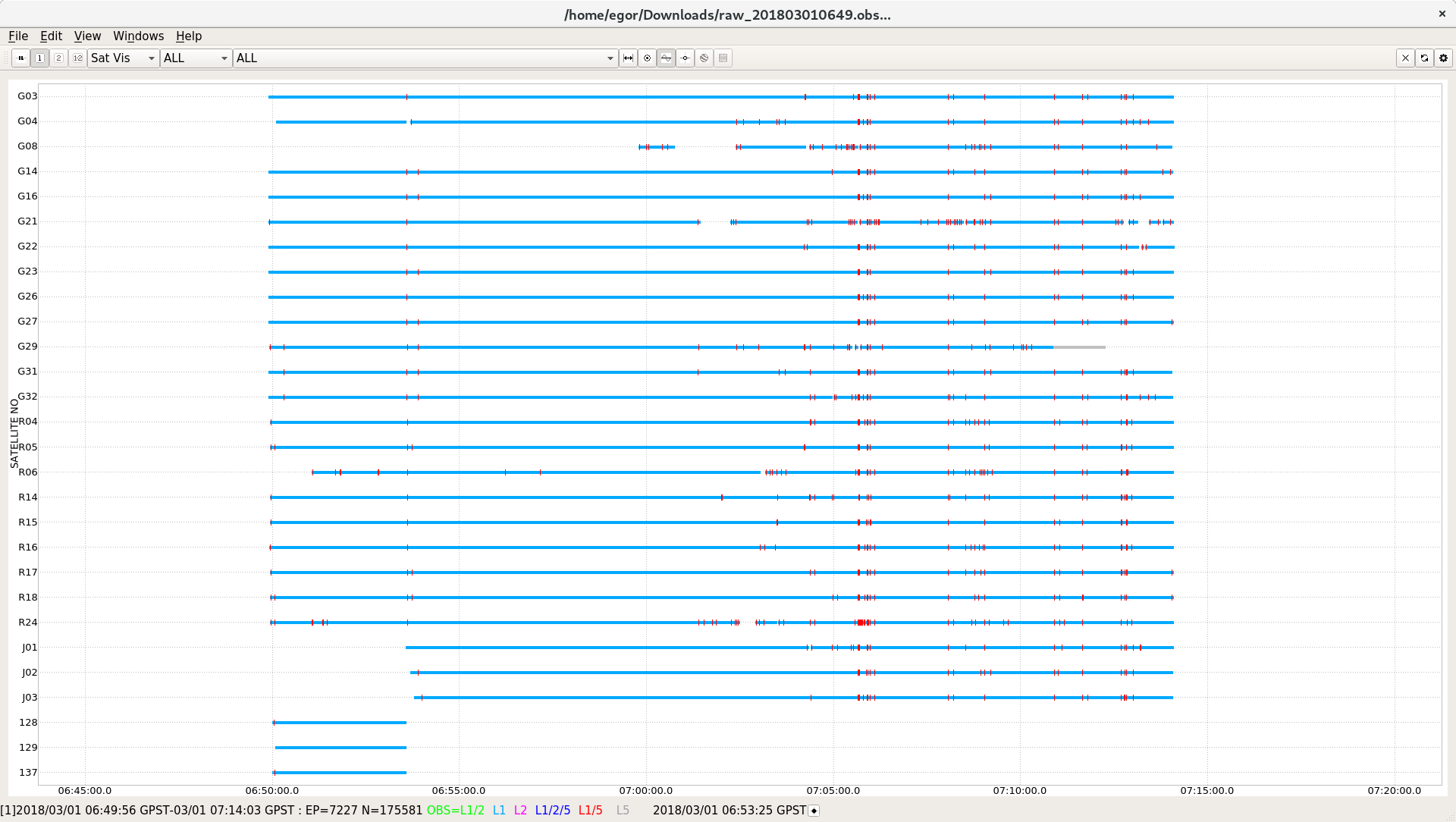
Other than that, need to check the obs files for cycle slips and actual skyview.
Now you can see the red marks, called cycle slips. These are the moments, when Reach lost track of the satellites. It is ok for some satellites to go out of sight and come back again, especially when the rover is moving. However, here you can see they went out all at once, which is very far from normal and this is exactly what reduces the solution quality.
It’s for you to investigate what happened. Maybe your antenna placement is not perfect, maybe your UAV is noisy, just as @TB_RTK guessed. Maybe it’s some sharp turns that produced this.
I think these data are very regular, there may be poor contact with the antenna interface. I will reinforce the antenna for testing. Wait for my good news.
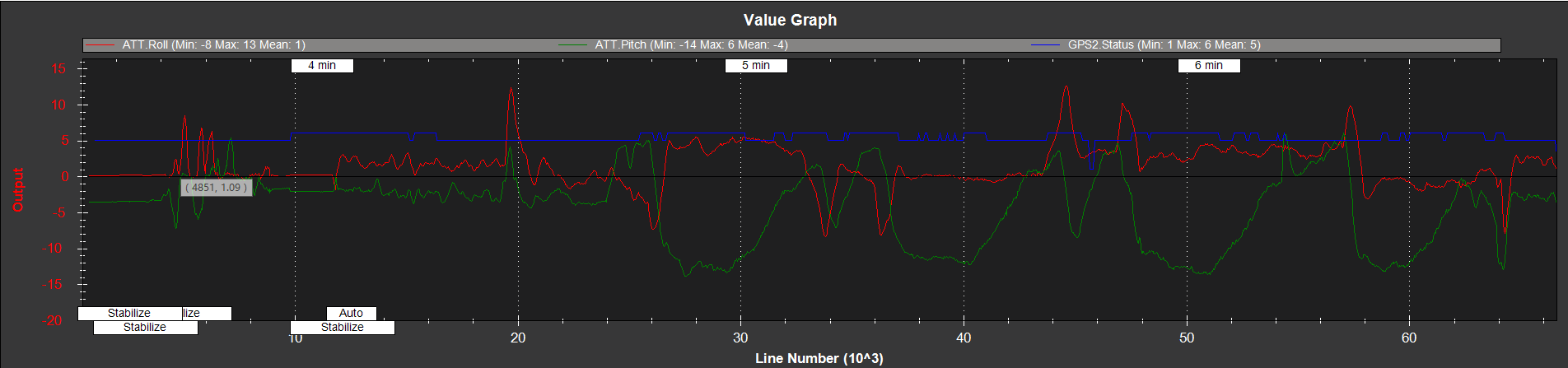
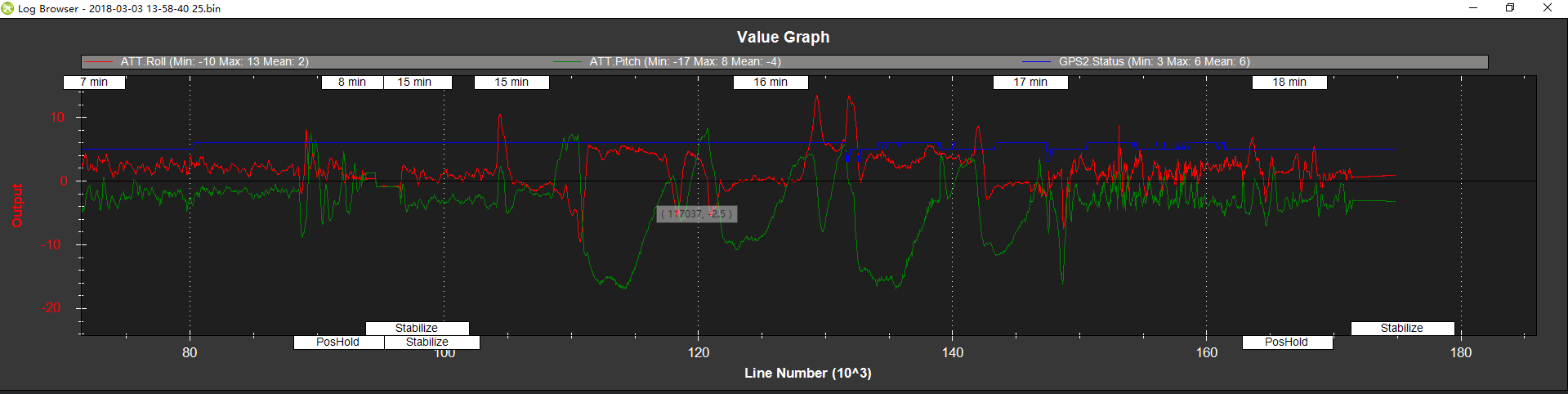
pitch -17 ~ 8 roll -10~13.Are these values normal?
The following file is my log flight twice.If you have time and are interested, please help analyze. 2018-03-03 13-58-40 25.bin (6.6 MB)
Your latest log show noice all the way up on both rover and base. Did you check solar flare or are you working on a location with alot of interference? what does your base looks like?
The speed should not matter unless we are talking about some kind of drone racing. What matters is the angle to the horizon(how much your drone tilts). The main reason is probably noise from the engines and electronics. I would suggest to mount the antenna higher, like the one on the right