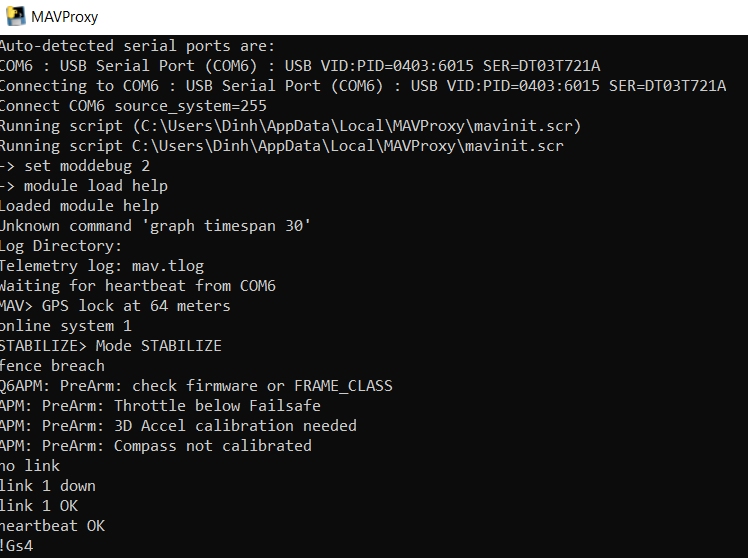
Goes to “Trying to connect…”, times out, “No heartbeat packets received”
UDP works though, but if I want to bring it out to the field, telemetry to GCS would not work then.
According to your terminal output, it seems, that Raspberry detects the transceiver.
Can you also print the following command in the terminal after the connection:
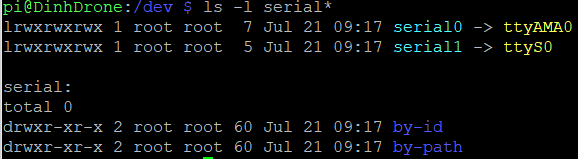
dmesg | grep tty
Moreover, I’ve been trying to reproduce your setup lately. And I’ve experienced a missing driver issue for Windows 10. Does your Device Manager show any warnings?
Finally, two more questions. Is there no telemetry red LED’s light at all? And do you have a JST cable without 4th and 5th wires for CTS and RTS by any chance?
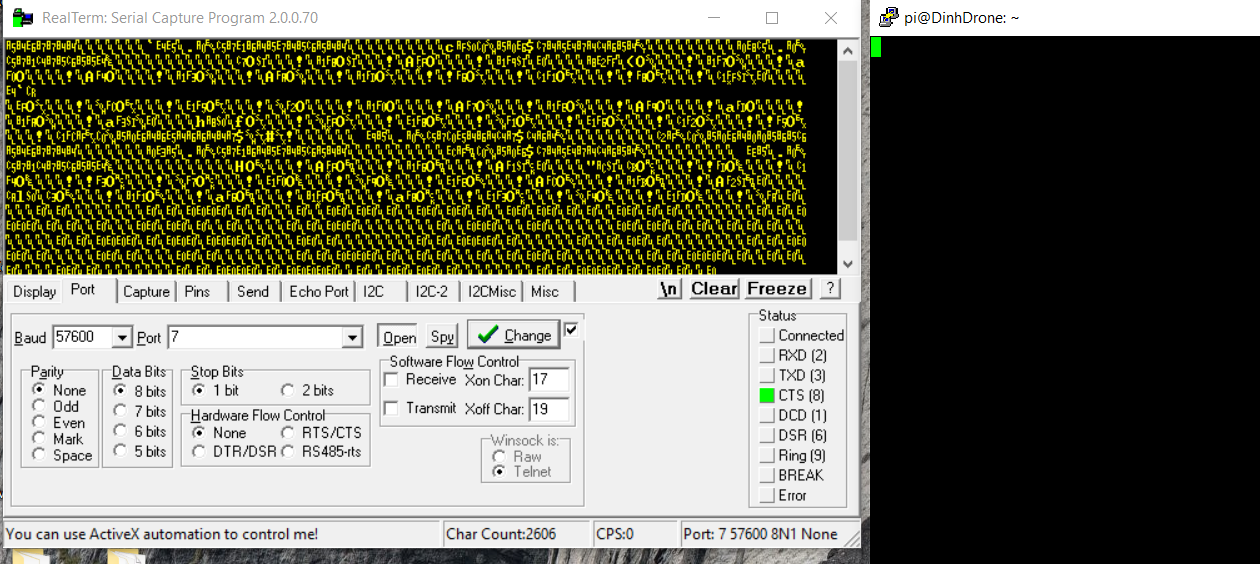
Red LED’s flash. when I use screen on the Pi, and Realterm on PC, the garbled messages and red LED’s are in sync as I press/hold on my keyboard. I couldn’t figure how to make serial input readable though…
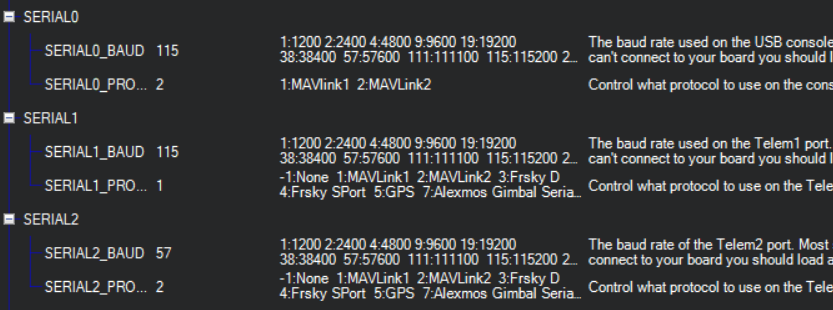
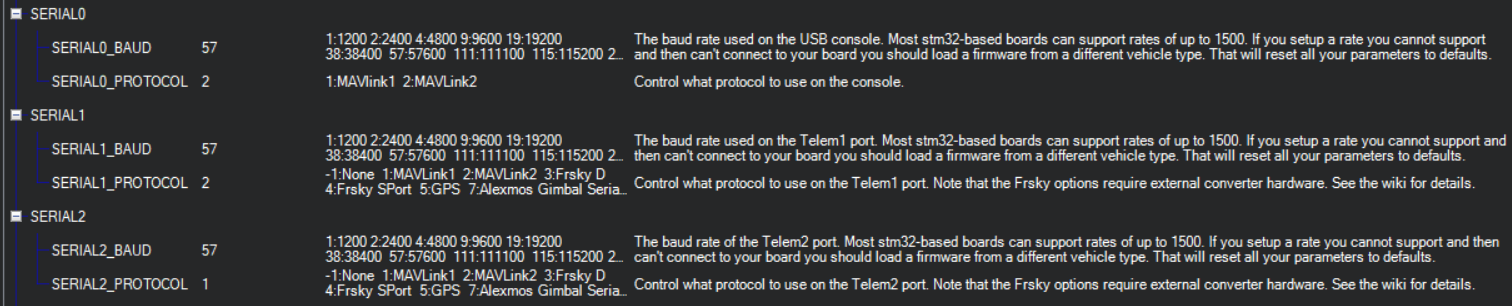
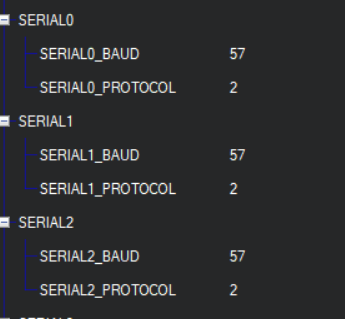
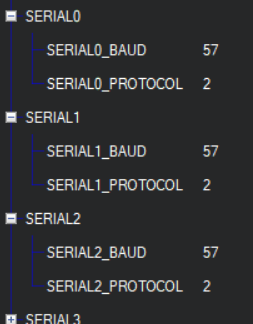
In the Mission Planner via UPD connection can you try changing the Serial1’s baud rate to 57? I guess, there’s a baud mismatch between your PC and a drone.
I believe, the issue was connected with a CTS and RTS wires (clear to send/request to send). As far as I know, there were issues with setting up a telemetry via radio when the CTS line is connected.
If you feel like experimenting, I’d love to know what was the catch exactly.
I’ve done a standard update and upgrade, and now the telemetry is not working like before.
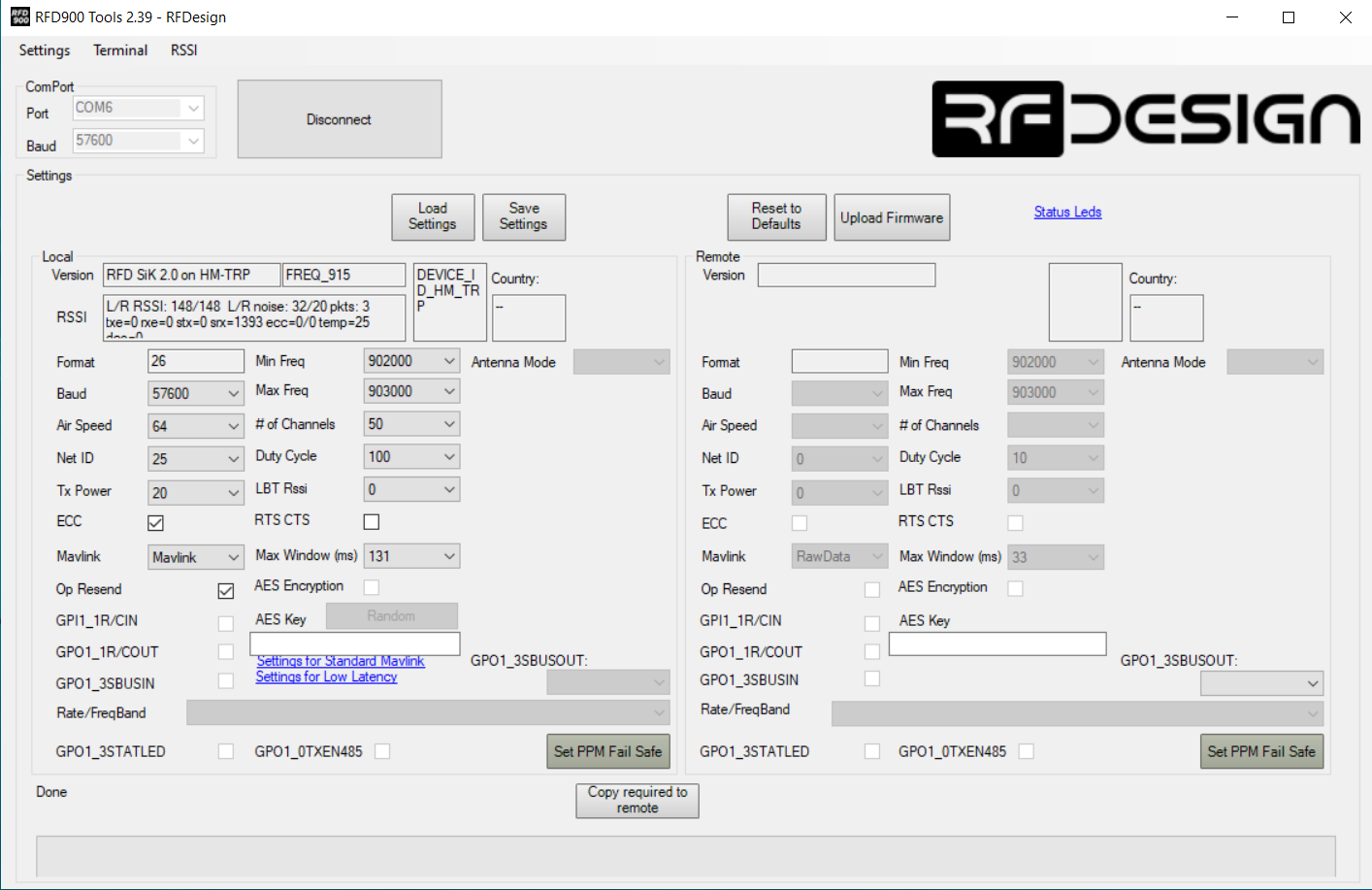
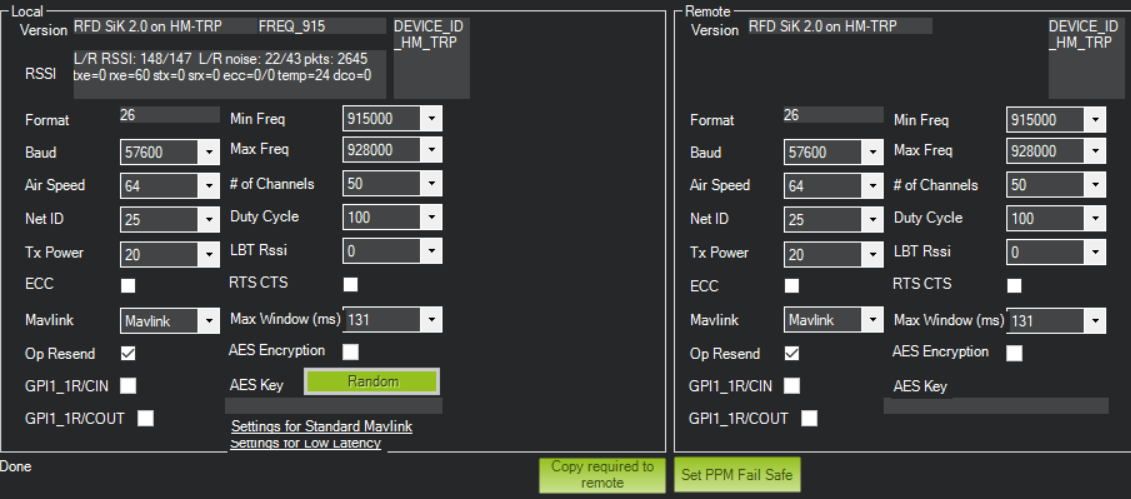
The telemetry module works only via USB on the RPi, and the UART port doesn’t let Mission Planner to connect. Below are snaps of some settings when it DOES work via USB.
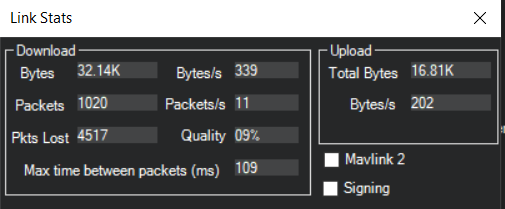
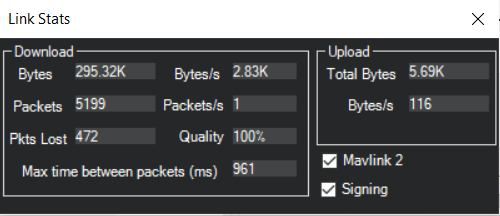
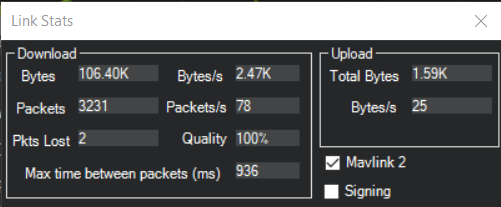
I’ve just tried various things, but I plugged in the JST-GH AND the microUSB into the air radio module, set the serial rates to 57 and MAVLINK2 and the quality and speed of communication improved drastically from 400 B/s, 9% quality, to 2.8KB/s, 100% quality.
Hope this helps anyone with this same problem and just a reminder to just try random things
If there’s an explanation for why plugging both USB and JST connectors work that would be so helpful.
I was just going to write to you with results of reproducing your setup
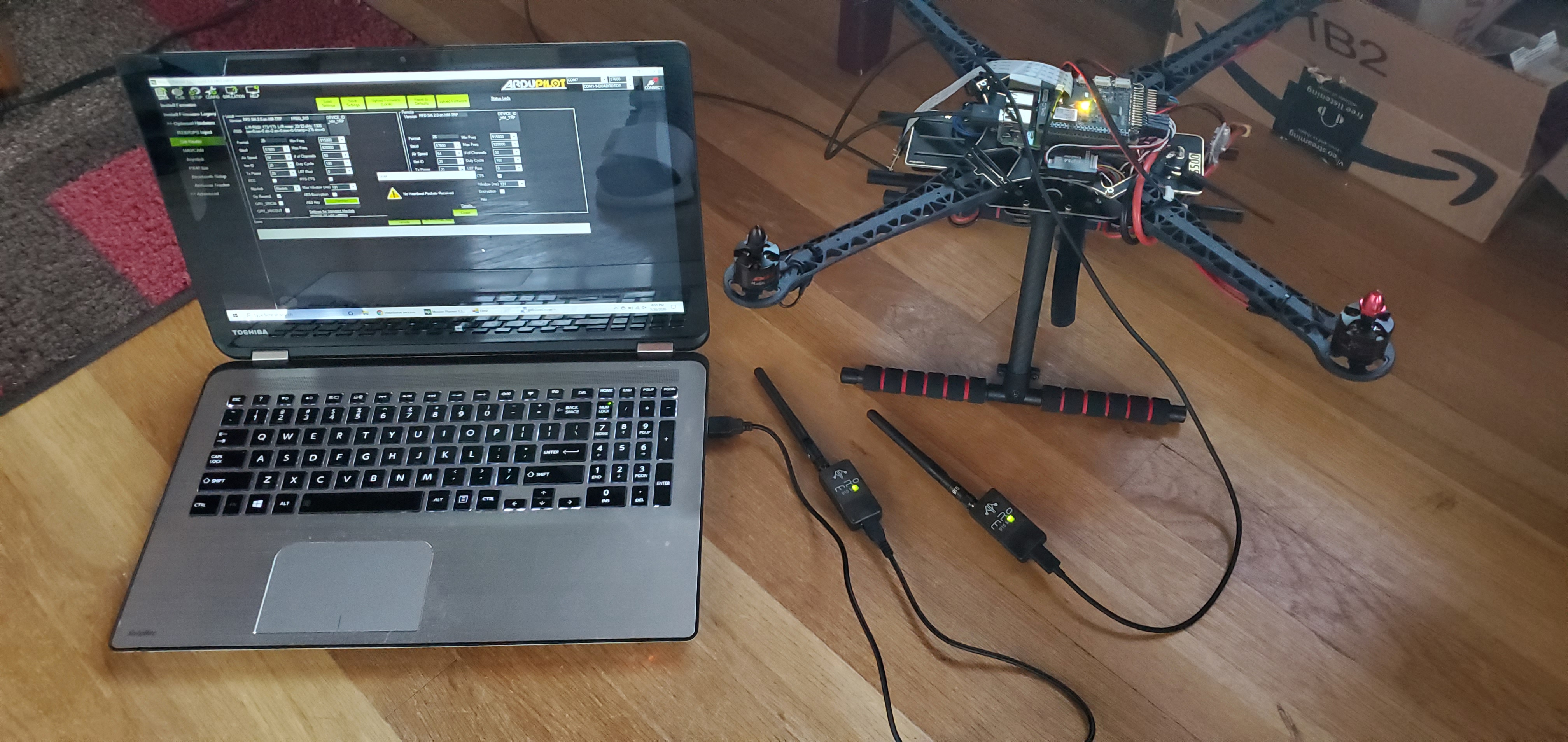
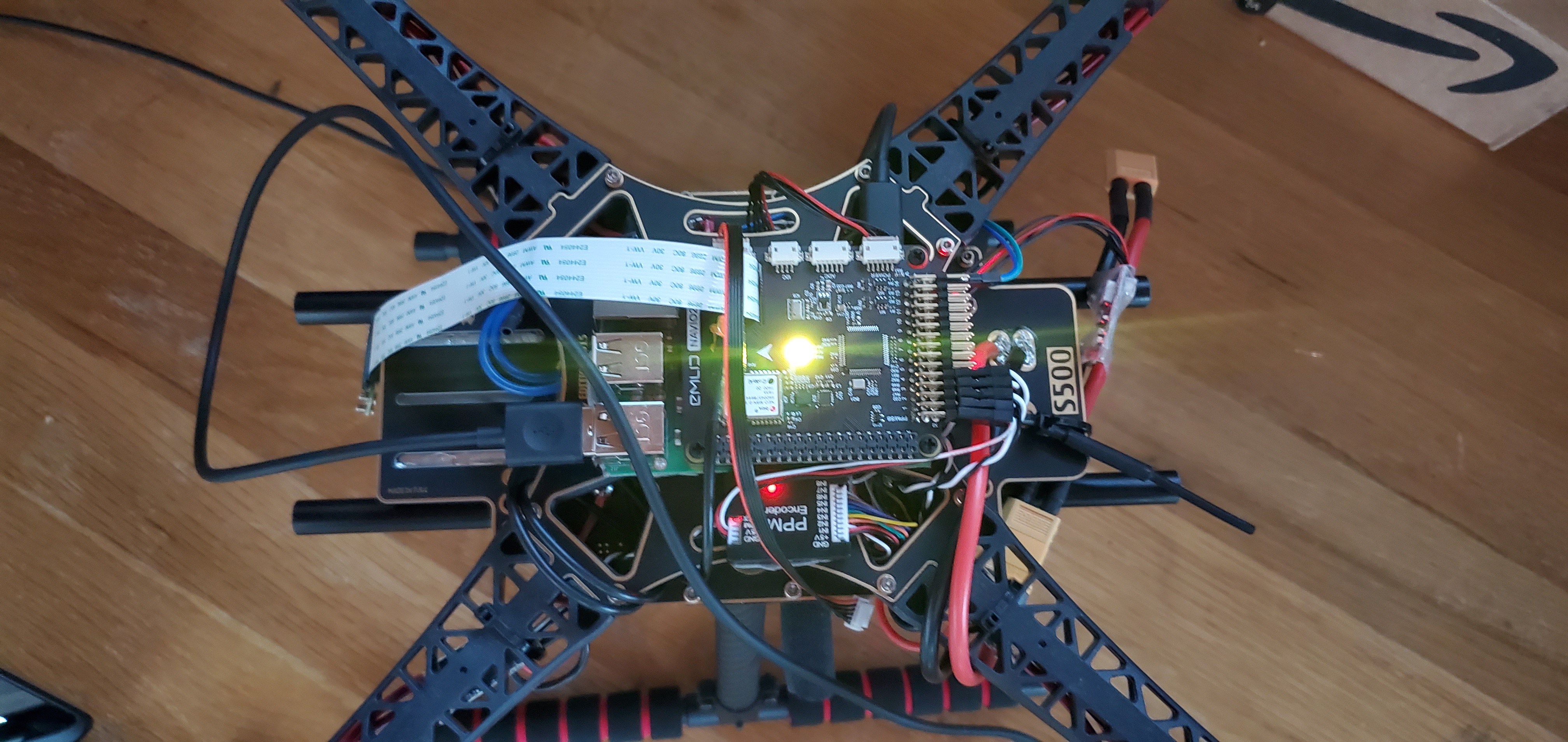
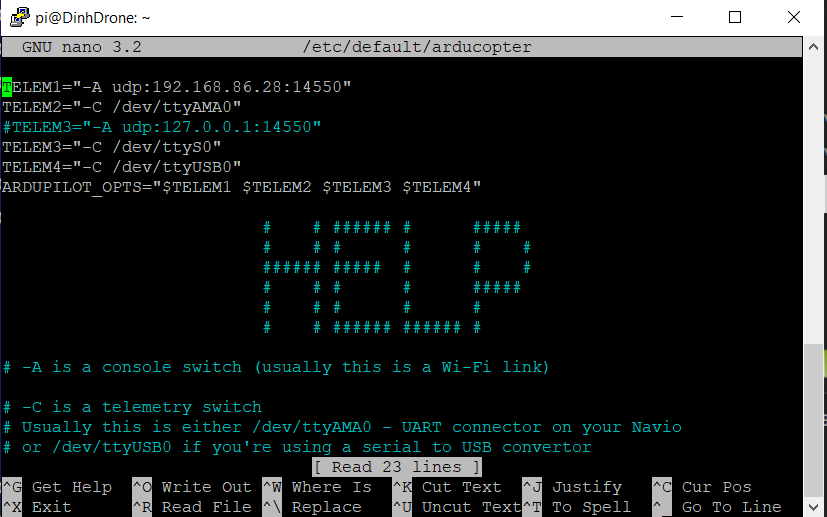
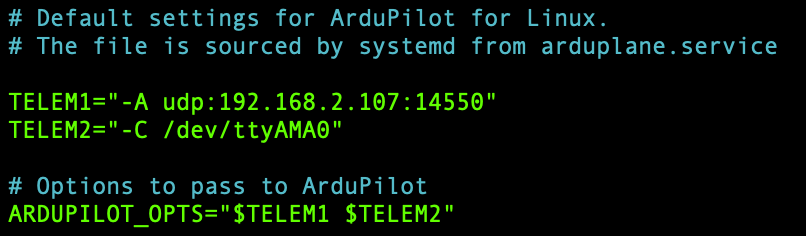
I’ve used two radios. One connected to the GCS with USB and second with UART connection to Navio2 (5V, RX, TX and GND wires only). In my /etc/default/arducopter file I made the following entries:
I’ve also checked the connection with your MP settings (baud and protocol) and it’s ok.
Since the connection was not established via UART and USB was OK, I suppose that with both radio module’s ports connected to your autopilot, ArduPilot is choosing the USB for telemetry. That makes me think that there’s still something wrong with the UART connection.
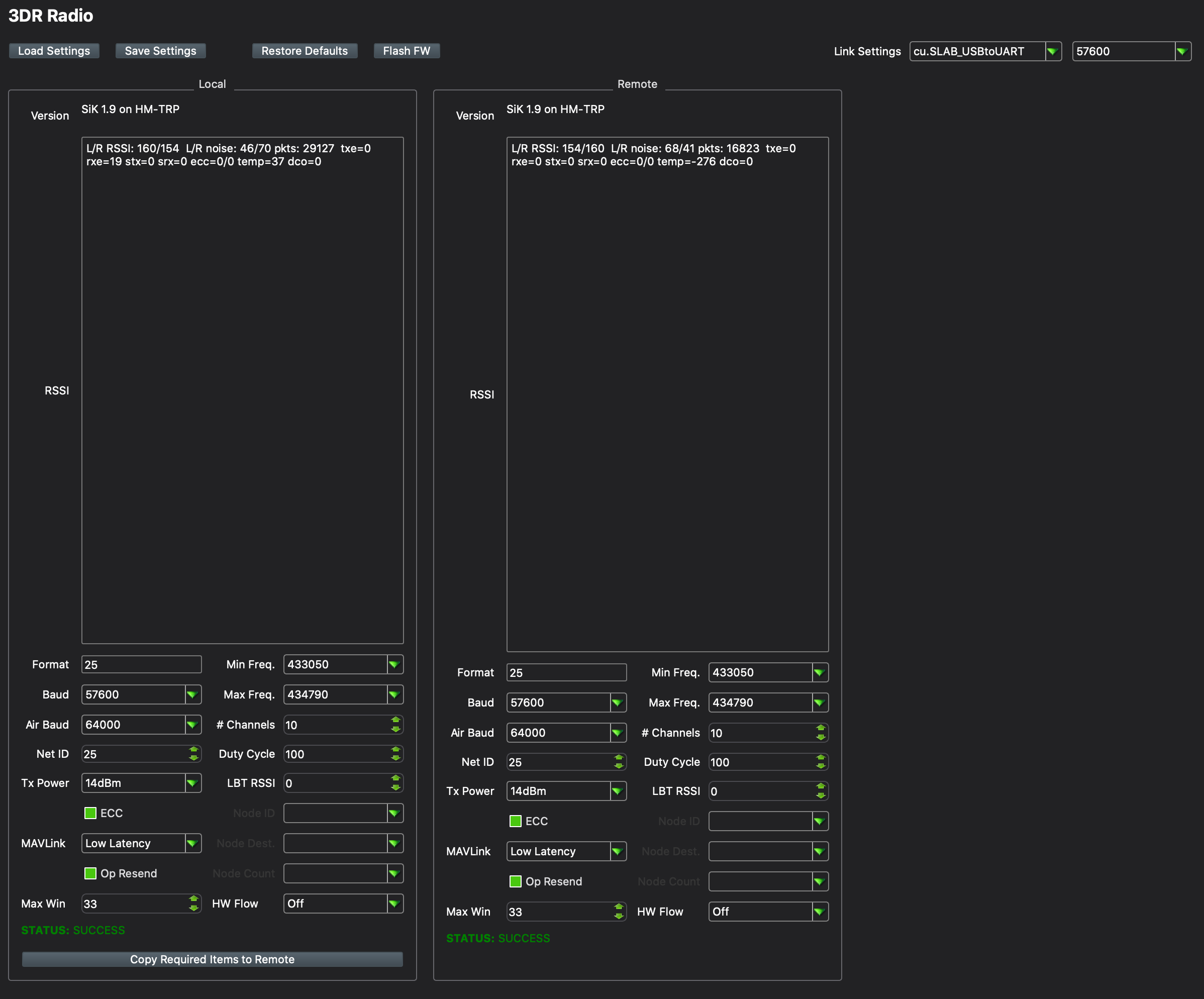
On one of your screenshots with radio settings, I see that the remote radio settings are faded. Probably you need to uncheck RTS CTS on the Navio2’s side too to make UART work?
Yes you are correct that the drone is choosing USB for the telemetry comms; I’ve disconnected the UART port and these are the stats I get (I’ve tinkered with it a bit by disabling signing and setting all serial to MAVLINK2 to improve the speed/quality):
Hello,
at the moment, I am facing the same issue and therefore rather answer to this conversation instead of creating a new topic.
Emlid Raspbian 4.19.127
ArduPlane 4.0
Computer: MacOs Catalina 10.15.7
APMPlanner 2.0
Connection via UDP works without any issues. I have connected my telemetry radio via UART-Connector. Both radio LEDs turn solid green then. I also physically disconnected CTS&RTS Pins. This made the red LED on the raspberry side flash continuously. When I disconnect the UDP connection, I am able to load, copy and save setting for the radio via APMPlanners 3DR Radio Menu (both red LEDs flash then).
So the connection itself works via cu.SLAB_USBtoUART and 57600 Baudrate. So I expect the issue to be on the raspberry side, as communication initiated from the Mac works fine.
After several failures with the standard configuration, I changed Serial0_Baud (from 115 to 57) and Serial1_Protocol (from 1 to 2).
I have tried a lot of random stuff. Connecting the radio via USB doesn’t even make the red LED flash. But I still have the feeling that the Navio2/Raspberry-part does not try to make a telemetry connection. I am running out of ideas. I just cannot establish a telemetry connection. Can someone help me?
just for others, that may have the same problem.
I was able to figure it out. I installed Windows on my Mac via BootCamp and tried to connect via Mission Planner. After Mission Planner “initialized” the telemetry modules, both red LEDs started flashing red.
Then I restarted my Mac on the Catalina Volume and everything worked great with APM Planner. I can’t really understand what the difference is, but it worked that way. The only problem I have right now is that I am not able to get GPS fixed while connected via telemetry. I am going to discuss that in another topic after I tried several things out.
I use Mission Planner only with W10 PC. No bootcamp installation on my Mac, only QGroundControl and Sik radio connection is fine. It could be a driver missing in the W10 installation. I also use SIK telemetry outdoor with OTG on my android phone (QGroundControl).
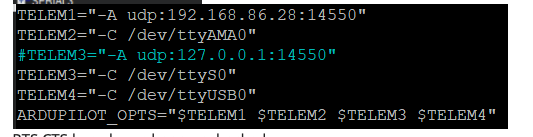
I’ve tried with only TELEM2(UART port), and still no heartbeat packets received.
The radios do flash red very briefly, then quit.
However when TELEM4(radio to USB on drone) is included, the connection goes through.
Major problem with USB connection, so far, is the velocity variance and GPS lock. Drone thinks its jumping around. I will provide video if needed.
I’ve updated to Arducopter 4.0 and no fix has been found.
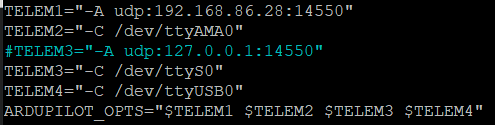
Your /etc/default/arducopter file is to be redacted:
If you want to use USB telemetry radio or UART telemetry radio (or both?) and do not want to reconfigure before each flight, you need to assign different serial port for each option.
Default is -C /dev/ttyAMAO (serial1-UART) or -C /dev/ttyUSB0 (serial1-USB)
Your possible arducopter TELEM option:
TELEM1 no change,
TELEM2=“-C /dev/ttyAMA0” when SIK radio is connected to UART (serial1)
TELEM3=“-D /dev/ttyUSB0” when SIK radio is connected to USB (serial2)