Detailed problem description. How does observed behavior differ from the expected one?
Your step by step actions.
Picture of the setup and connection scheme.
If you are reporting an issue with solution, please provide RTKPLOT of observations from rover and base (with all the systems enabled and LLI flag for cycle slips). Instructions can be found here.
Attach RINEX log files for rover and base. If you prefer to keep them confidential, you can email the files to support@emlid.com with a link to the thread. Please note, that in this case, other community members will not be able to help you.
Hello Emlid family! I’d like to know the right settings and procedures for running a static survey (not kinematic) with reach rs2 survey kit, with the base at a known point and the Rover collecting the unknown points on the field. Is it the same settings and procedures as running rtk survey??
You’ll still want to set both BASE & ROVER as KINEMATIC. Even the BASE, just use 1Hz Update Rate, and 5Hz or more for the ROVER.
Apparently the whole RTK system works best this way, versus the BASE set on STATIC. I think if BOTH your BASE & ROVER were set to STATIC and meant for BOTH NOT TO MOVE AT ALL, then you would use STATIC.
The later part of your response gives a clearer description of what I want. I’m much concerned about the settings when both the base and Rover are set to static type of survey. To further give you a clearer understanding; I’ll be using the units 80% of the time for running cadastral survey. In my country, rtk post processed data is not acceptable(not yet) when submitting plans/maps of lands to Survey & Mapping department. You have to run and post process your survey in static mode only. I don’t have a problem with the 20% of the time I’d be using the unit for rtk sessions. Thanks
I want to know if besides setting the base and Rover to static mode, the process of collection of points and duration of the collection of each point(with the rover) and other routines will differ from that of the kinematic mode routine. Thanks
Don’t know. I don’t have a use for a STATIC ROVER (as meant by rover just sitting there for hours). Maybe try both STATIC & KINEMATIC and see?
There may be some confusion here about “STATIC”?
STATIC means non-moving, both BASE and ROVER just sitting there not moving.
I think you may possibly mean the BASE is not moving as typical, and the rover is moving to a point, record point, then move, record point and so on. Stop and go.
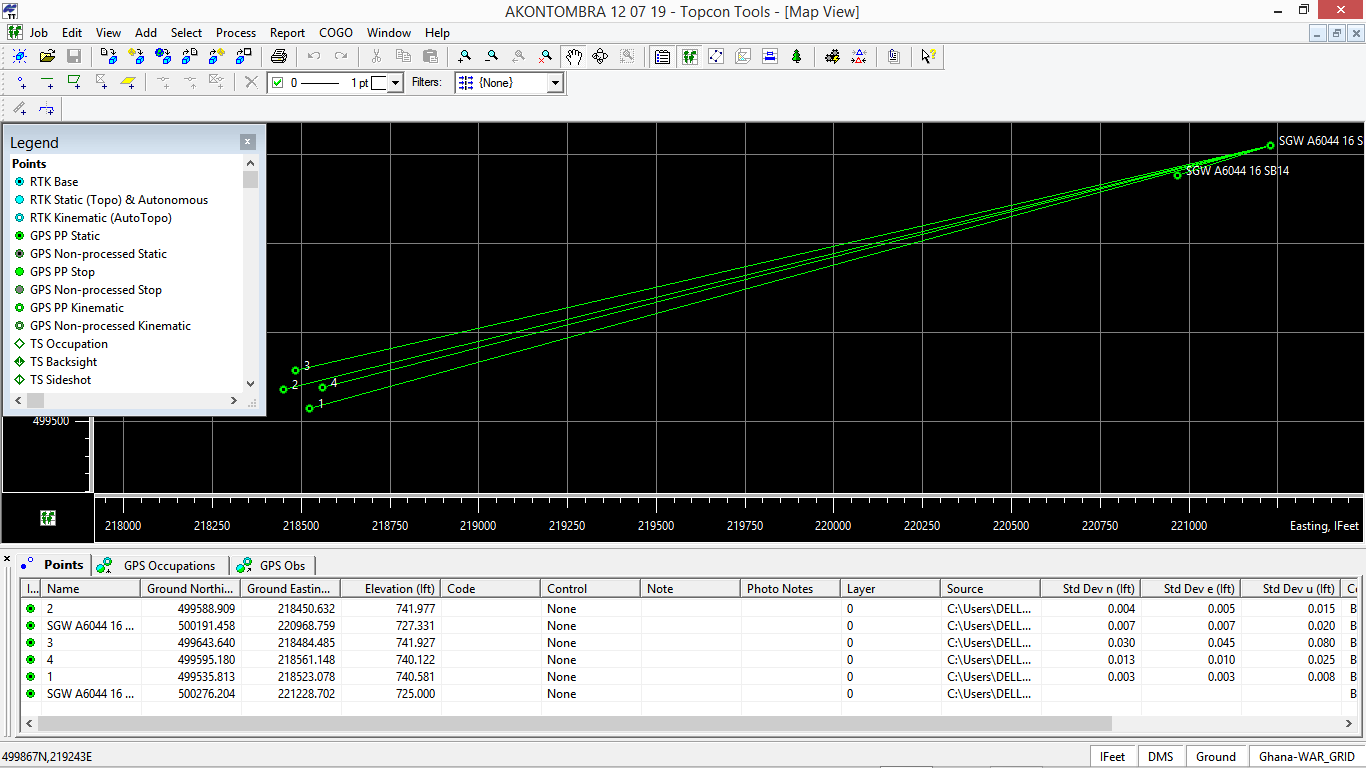
Hi @timd1971 I don’t know if this screenshot will help you understand me. It is a shot of post processed static points. I move to the point, collect the data based on the recommended times span per point. I collect each point in static and post process them as static points, i don’t need post processed data of my movement(rtk post) on the field. Only relevant points (boundary of client’s parcels, point by point). Thanks in advance .
If I understand correctly you must provide a raw file for each observation you make (kind of justification to provide for an administration)
first you have to know if you have to turn off your mobile receiver by moving from the first point to the second point then to the third etc. (the principle of static - Base and mobile do not move), this method is not practical if the distance between points 1, 2, 3 etc. is short.
or leave the mobile receiver turned on and move from point to point (the principle of kinematics or the Stop and Go here the start and end time must be known for post-processing.
property for both processes the base must observe permanently on a known point.
Note that with RS2 the observation time is more shorter than with a single frequency receiver like RS+.
100% @Zinou . The base is always mounted on a know national reference station, the Rover observes the points on the field and finish the survey by observing on another known national reference station to check the variations. I always need to provide raw logs for each observation of point I make to the authority. They post process it as well for quality control purposes ( check whether the coordinates I’ve submitted are same as what I’ve observed or I’ve tempered with the results). I think the first option is on point but can you further elaborate on the “mobile receiver on or off” suggestion? Thank you!
choosing the option or the other depends essentially on the distances between the points to be observed and the accessibility to them.
by turning off the receiver and turning it on again you will lose a little time especially if the points of the boundaries of the plot are close to each other (the case of small parcels for example).
In the case where the points to be observed are distant from each other and accessibility is more or less difficult, I prefer to turn off my receiver and turn on again as soon as I am in place.
you have to do a test and deal with both software to see what suits you best knowing that you need to convert the files obtained with RS2 to RINEX I do not know if GNSS solutions fits well with it (maybe to RINEX v2.11 more good).
Be careful GNSS Solutions is now only good to just one base to do corrections, I have GNSS and have the dongle key for L1 L2 processing and it has always been great but now if I try more than one base for processing it will crash, and even just choosing one cors base it may crash so you have to find the cors that must be running older hardware and use it everytime. It’s a bummer too I really liked it. Now I use Trimble TBC which was expensive or you need to learn to use RTKlib
That’s true @brycethomaskennedy, I don’t have the keys for the dongle but it does happen to me sometimes when I’m post processing L1 data. That’s when topcon tools came in. Thanks!
Hi @Zinou, @brycethomaskennedy I’ve taken delivery of my New RS2 device, and I can’t process any static data in both softwares. I changed the positioning mode to static in the rtk settings and it is still not working. Note: I changed the extension .obs to .19o before the softwares could accept it but they can’t be processed. Topcon tools shows several(100s) points instead of only 3points and show them as ppk points even when the position mode in in static mode on both base and Rover unit. I need assistance please
Hello Richie,
Congratulations for receiving RS2, can you please send me your log files from base and rover, I will take a look and try to post-process my self and show you how to make it.
From your description, I take it you have used the .ubx from the RS2.
When logging with a raw-file (or in Rinex for that matter), your RTK settings (apart from Constellation-selection and Hz-Rate) doesn’t matter.
Static/Kinematic only influences the position file/position output.
If you want to have to output static positions, I will suggest you instead start a Survey from the Survey tab, or post-process the ubx-raw-log as Static (preferred).