Something appears to be wrong with how my Navio 2 is receiving the SBUS signal from receiver. When I go to radio calibration in ground control the channel monitor dots are all over the place and not moving in correspondence with my stick inputs. I am running servo cable from SBUS port (connected in the right direction) on the receiver to the PPM-SB port on servo rail next to channel 1 with bottom pin being ground. Radio is SBUS paired indicated by purple light on receiver and signal bars from transmitter. Channel monitor does move with stick inputs but in extremely erratic fashion.
FC: Navio 2 w/ RPI3 b+ w/ ADP v 3.5
GC: QGroundControl v.3.32
Transmitter: Radio Link AT9S
Receiver: Radiolink R9DS
The cat/sys/kernel… command is returning a no such file directory found message and I have attached the results of other command below in addition to a picture of my setup. Let me know if there is any further info / pictures I could provide.
Update-alternatives result is quite the same except “manual” mode, you have “auto”
pi@navio:~ $ sudo update-alternatives --display arducopter
arducopter - manual mode
link best version is /opt/ardupilot/navio2/arducopter-3.5/bin/arducopter
link currently points to /opt/ardupilot/navio2/arducopter-3.5/bin/arducopter
link arducopter is /usr/bin/arducopter
/opt/ardupilot/navio/arducopter-3.5/bin/arducopter - priority 50
/opt/ardupilot/navio/arducopter-3.5/bin/arducopter-heli - priority 50
/opt/ardupilot/navio2/arducopter-3.5/bin/arducopter - priority 50
/opt/ardupilot/navio2/arducopter-3.5/bin/arducopter-heli - priority 50
Does mine need to be set to manual mode instead of auto? What difference does this make? Cat command readings below. My ch2 doesn’t seem to move very much but does give some variation when moving sticks.
Looking at Radiolink R9DS sBus problem (google) it appear sBus period of R9DS could be shorter (13microsecond) than R9D (15 microsecond). If you have a R9D receiver, you should have a try.
I found some information online that confirms what you are suggesting. Is there any workaround with the R9DS rx with Navio2 or will I need to invest in a R9D rx?
It is the flight mode selected. It could be related to your sBus problem as your radio signal is not coherent.
I’m suggesting you should look around you if there are other RC users and have a try with another radio brand. So when sure the Navio is working well, you can choose to buy a R9D receiver (may be working).
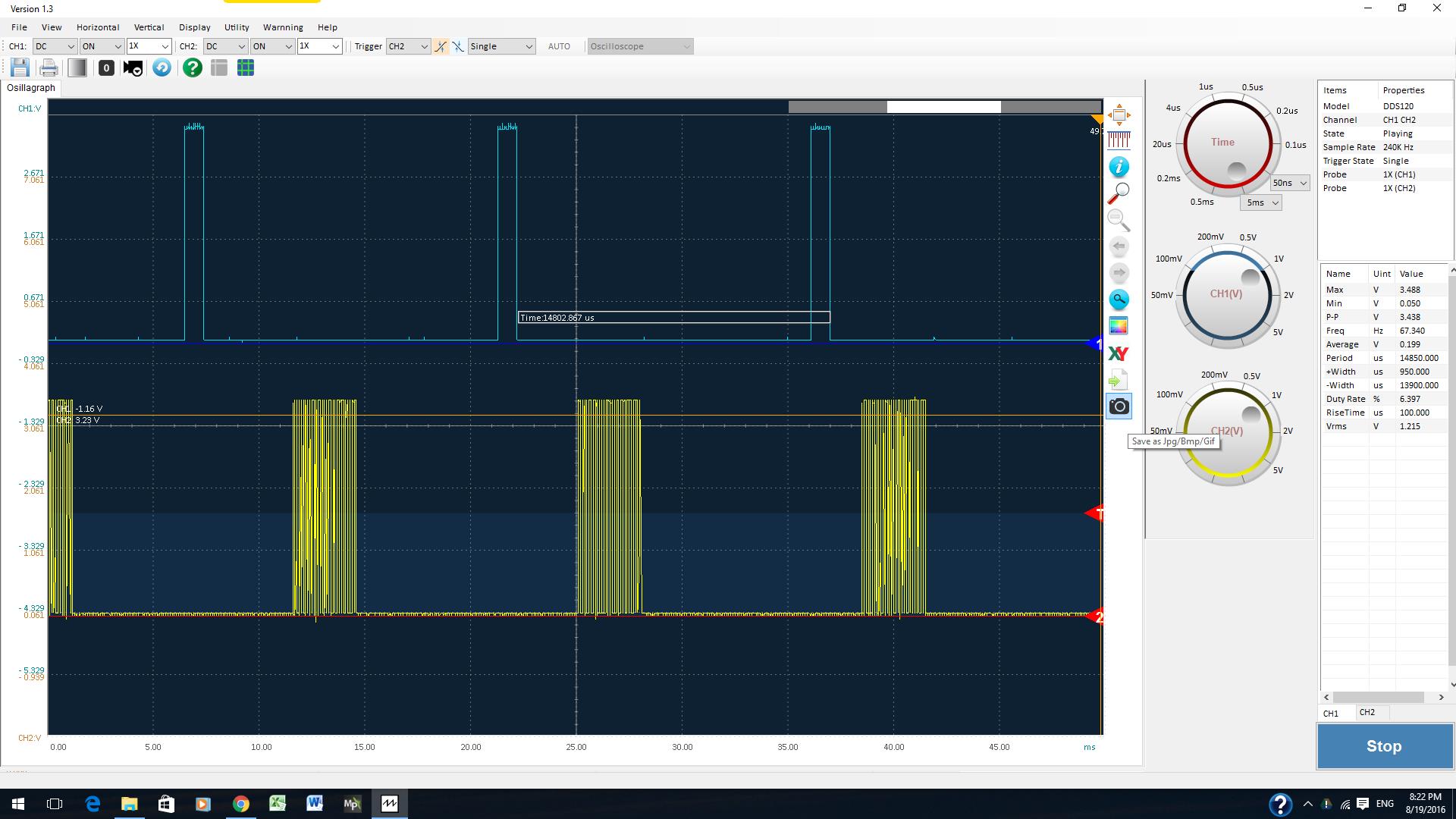
I compare R9D and R9DS. On Oscilloscope there is not much one can find without knowing protocol. The only difference is that average packet period with R9D is 13 msec, and with R9DS is 15 ms.
I connect them to spare revo FC and with R9D manual radio calibration went OK below is the video of throttle response (GSC update is slow, so it is choppy)
With R9DS I even could not do manual calibration. Attached is the video of response (no response) during calibration.
I also attached oscilloscope screenshot.