RS3 tilt compensation is not engaging.
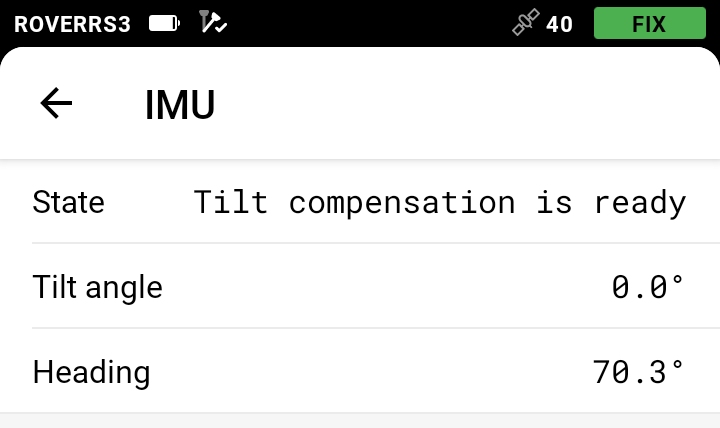
Tilt compensation has initialized, as indicated by IMU status “Tilt compensation is ready” and corresponding tilt angle and heading values reported. For example, when the rod is plumbed using the bubble vial, the IMU status reports a tilt angle of 0.0 degrees.
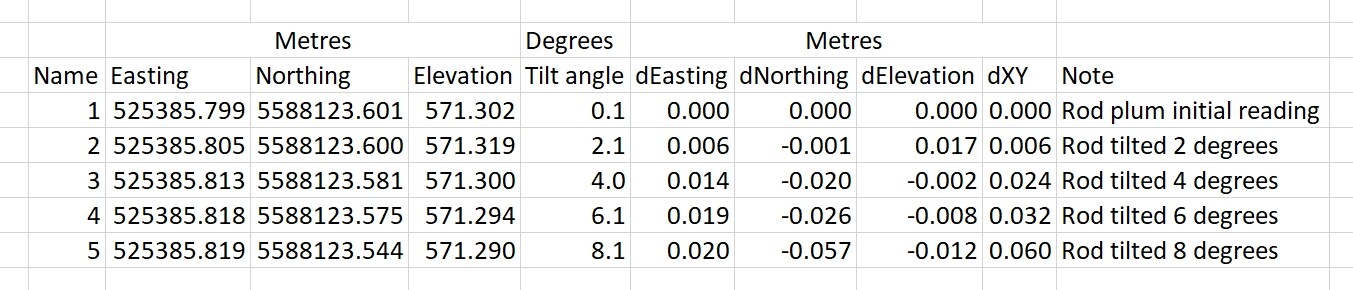
I find that the tilt compensator is not engaging. That is, I logged a point with the rod plumb. Holding the rod tip on the same point, I then tilted the rod by 2 degrees and logged a new point. I then tilted the rod to 4 degrees and logged a new point. And so on. What I found was that the new points were in different locations, as if tilt compensation was not engaging (i.e., not having any effect on the rover coordinates being recorded).
I must be doing something wrong. Just can’t figure out what. Thought I would make this post in case it helps anyone else who runs into this problem.
I am running version 31.5 in the RS3 and version 9.2 in Emlid Flow, which are reported to be the latest versions.
Joe,
What kind of rod are you using?
What is your source of corrections? What is the baseline?
6cm of error at 8 degrees is definitely not normal, but TC is engaging. Without it, you would be seeing almost 30cm of difference.
If this error is repeatable, I would check the rod height once again and verify that it is straight.
What if you toggle the TC on and off while holding the rod plumb? Does it change the reading?
3 Likes
Thanks for your response.
The rod is straight, as the bubble stays inside the circle when the rod is rotated 360 degrees. Rod is SitePro 07-4626-TM with 20-minute bubble vial. I remeasured the rod height, and it is 2.400 m as input into Emlid Flow.
Corrections are from an RS2 with baseline of 19.7 m.
I see your point that the tilt compensator is in fact engaging, as for a tilt of 8 degrees, the error should be more than the indicated 6.0 cm. This is showing that the tilt compensator is engaging but not performing to the level that I would have expected. That is, for a tilt angle of 8 degrees, I would have expected to yield a rover coordinate that is within perhaps 1 cm of the expected coordinate.
1 Like
Could you please try to set the rod to 1.8M with the locking pin and try again? Just to be on the safe side, as this is the typical rod height that we use in our tests. We will check with a 2.4M rod in the meantime on our end.
2 Likes
Hi Igor,
Many thanks for your help. Adjusting rod height to 1.800 m appears to have fixed the problem.
As shown in the table above, the horizontal errors when tilting the rod away from vertical are in the range of 0 to 5 mm for tilt angles of 2 to 8 degrees. Tilt angles of 10 to 18 degrees yielded horizontal errors in the order of 10 mm.
Thanks again for your prompt help, as I can now do my work today, but just have to work with a rod height of 1.800 m for the meantime.
4 Likes
Glad that it helped! We will investigate what goes wrong with the 2.4M height.
@JoeSixPack could you please confirm if you are using iOS or Android?
3 Likes
Joe, we have tried to replicate the issue, but without any success so far. Could you please check if the error is reproducible on your end? Could you please try with a 2.5m pole again?
2 Likes
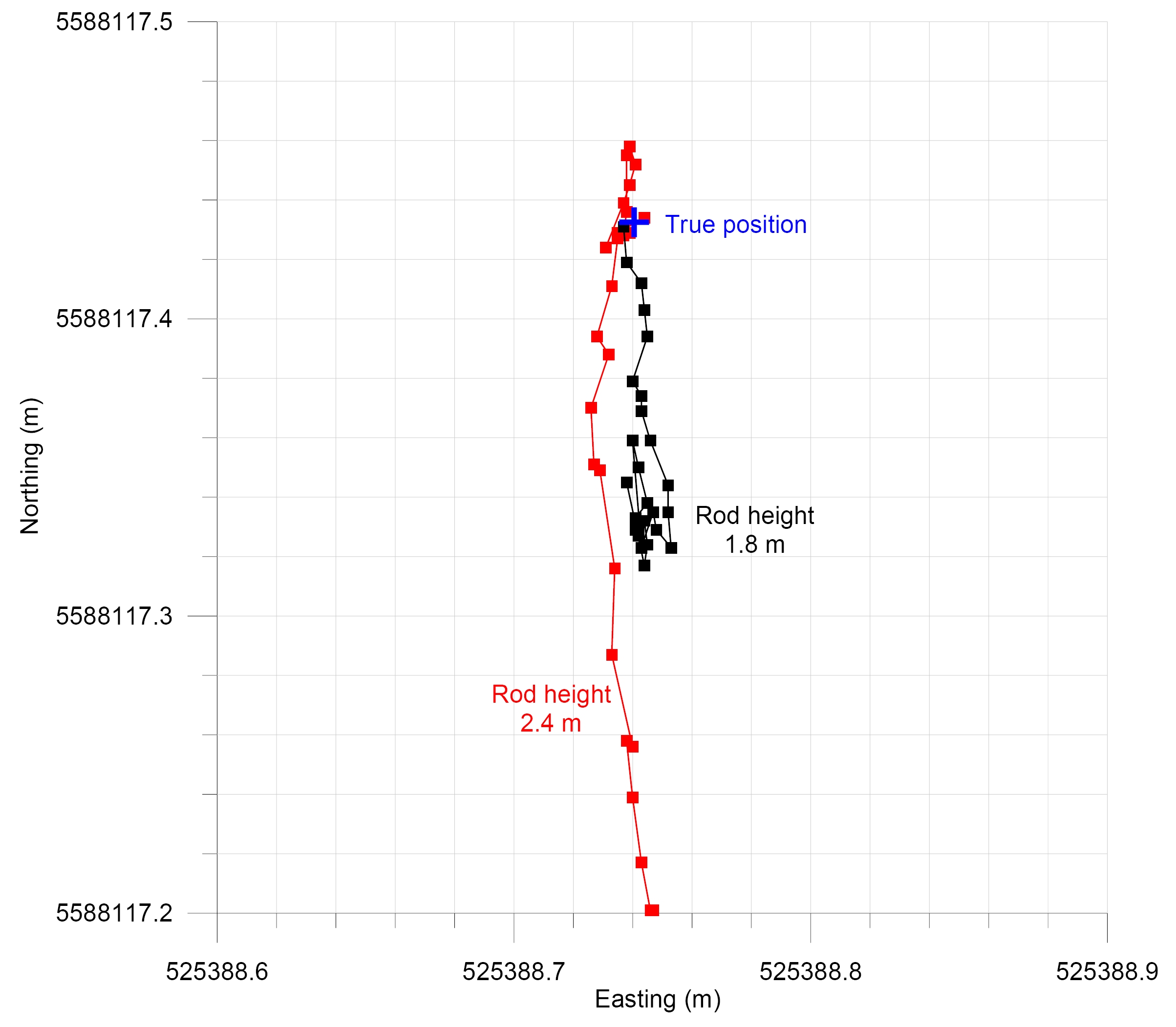
Igor, I did another tilt test today. I see what you mean that the 1.8 m rod height is not the solution. I need to do more testing to better understand tilt compensation in the RS3 before I can use it on projects.
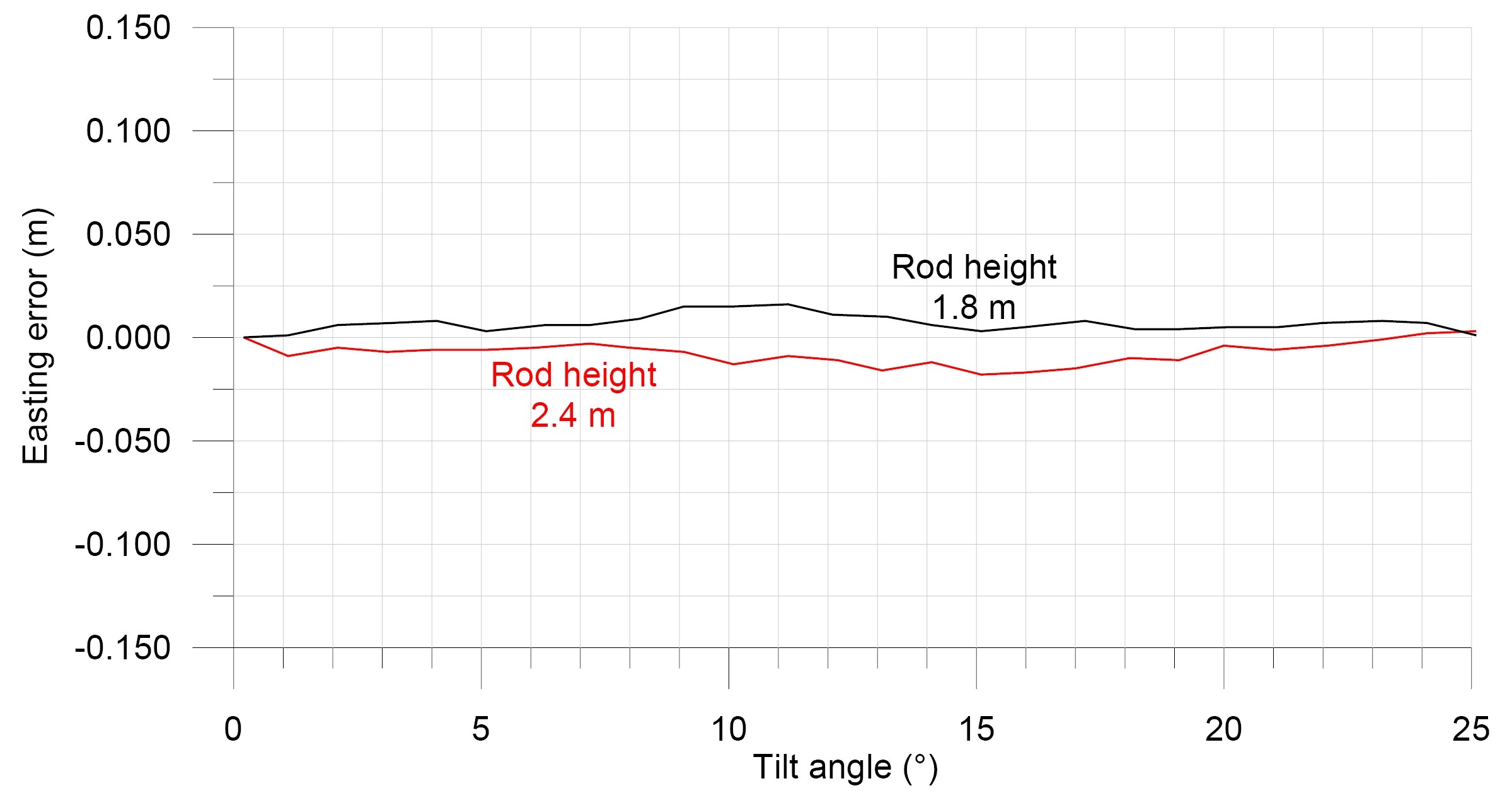
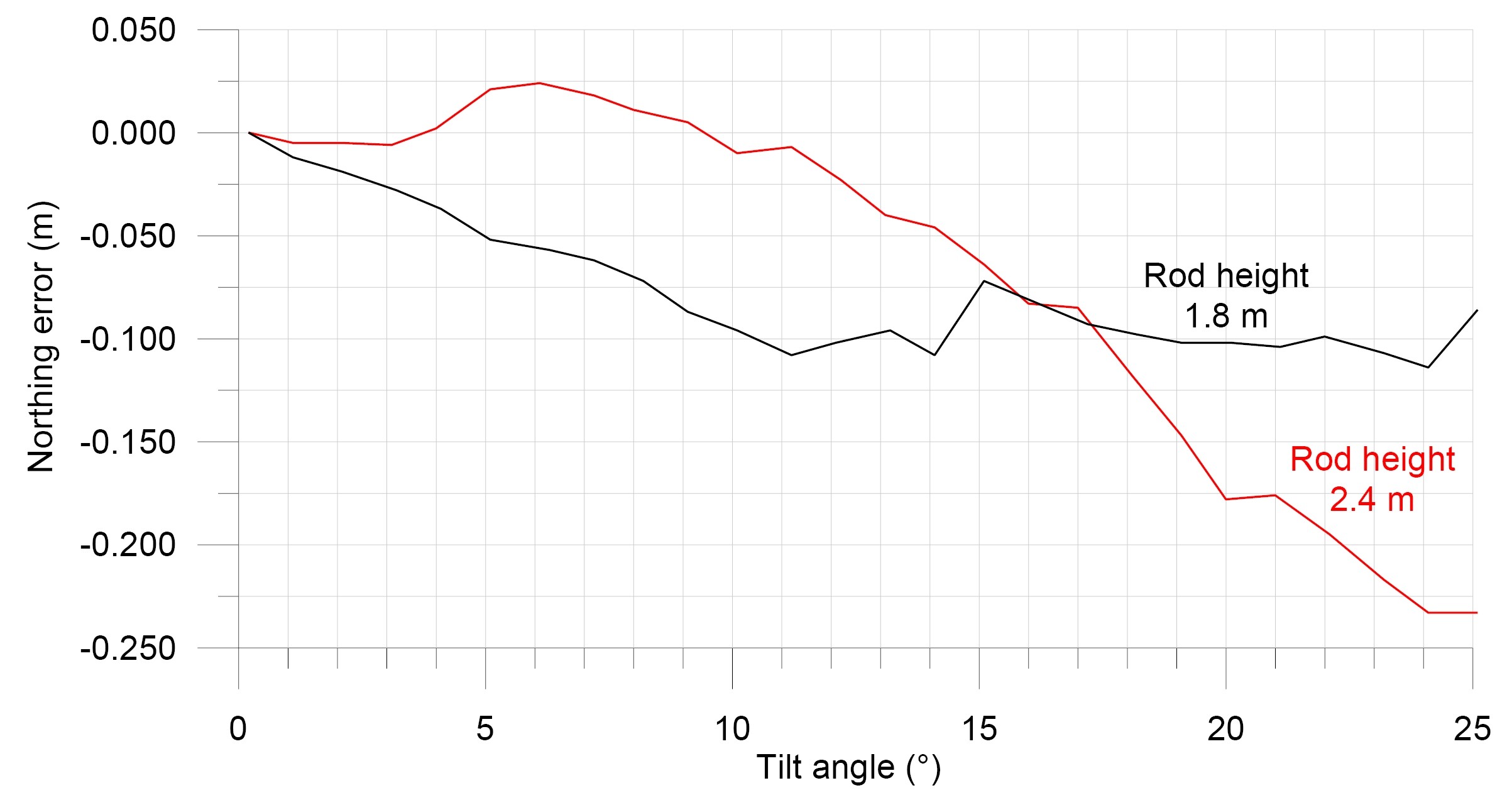
For this test, the 2.4 m rod height yielded better results up to a tilt angle of 15 degrees. For tilt angles of 12 degrees or less, the 2.4 m rod height yielded horizontal errors 0.025 m or better (mean 0.013 m).
The 1.8 m rod height yielded better results for tilt angles greater than 17 degrees. For tilt angles of 10 degrees or more, the 1.8 m rod height yielded fairly consistent horizontal errors of 0.100 m. At tilt angles less than 10 degrees, horizontal errors for the 1.8 m rod height increased linearly from zero to 0.100 m.
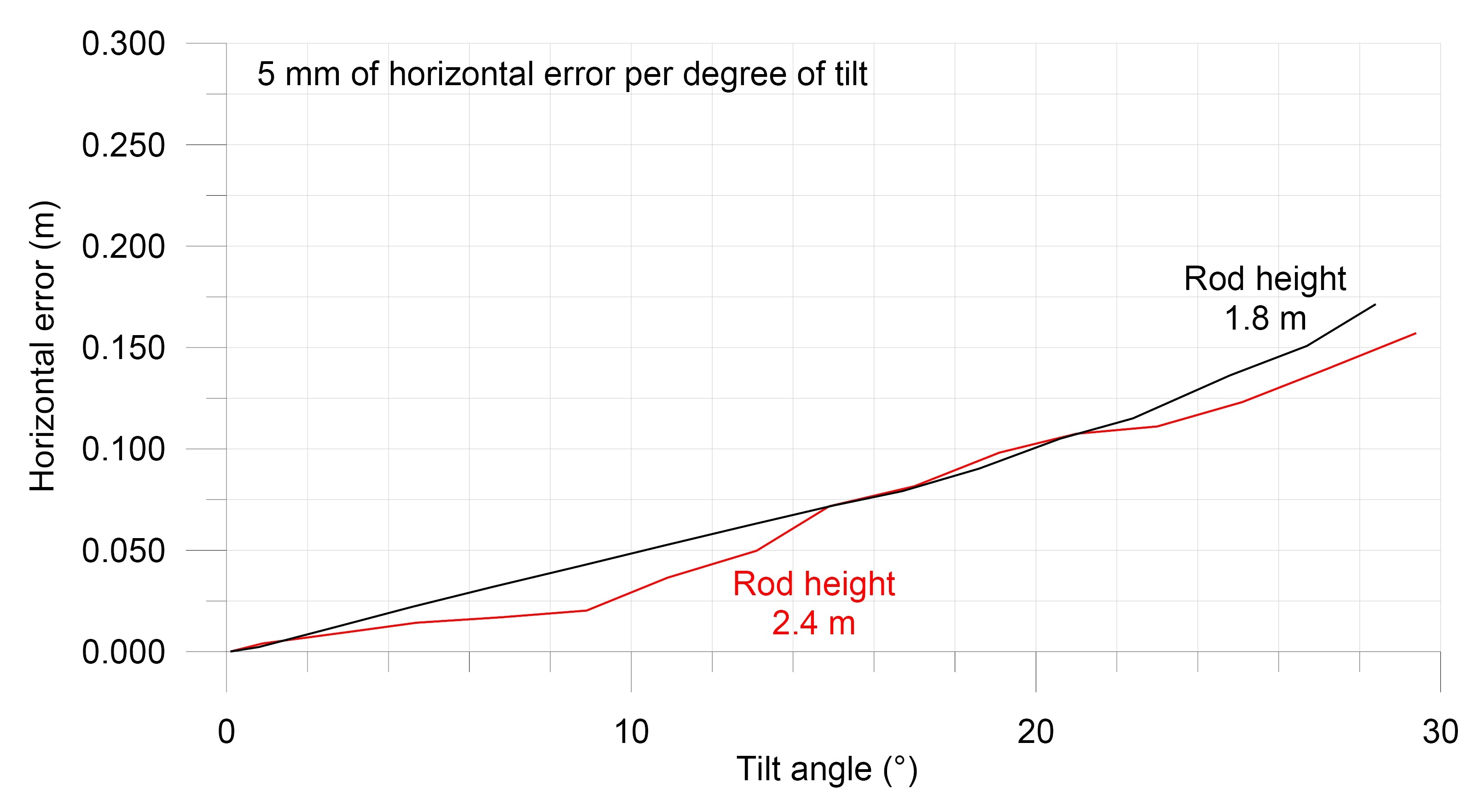
The results for horizontal error are compiled in the figure below.
It was strange that the horizontal errors were made up almost entirely of errors in the northing. The tilt heading I used was to the east, yet the rover coordinates are in a north-south line.
1 Like
Joe, this looks really strange to me. It shouldn’t work this way.
May I suggest that you try to observe the following: measure a point with the rod plumb, then select it for stakeout and tilt the pole in different directions, while monitoring the real-time differences on the stakeout screen.
I am now wondering if this particular type of test, with very small incremental changes in the tilt angle is somehow affecting the result. Overall, the system relies on motion to calculate attitude, so this kind of test could be a bit of an edge case. We still should be able to handle it, but just trying to look for hypothesis on how you might be getting such errors.
3 Likes
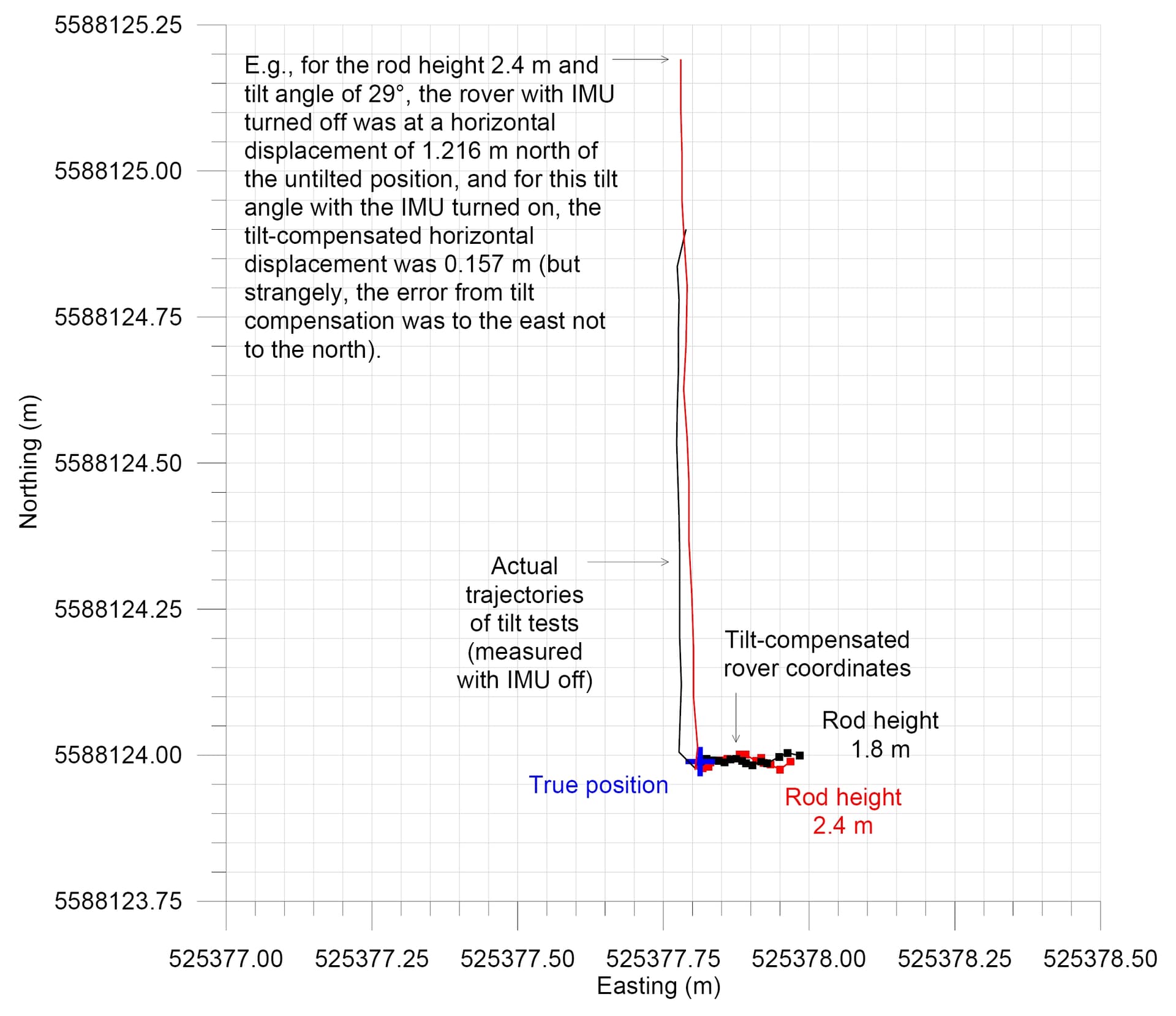
Hi Igor, I tried some more tests today. I had some mixed results. My test 6 yielded consistent results for both rod heights. For this test, I varied tilt angle along a northerly trajectory for rod heights of 1.8 and 2.4 m. The finding showed a linear increase in horizontal error of 5 mm per degree of tilt for both rod heights. Strangely, the horizontal error is again perpendicular to the actual tilt trajectory, as shown on the map below. So, there can be no doubt that tilt compensation is engaging.