



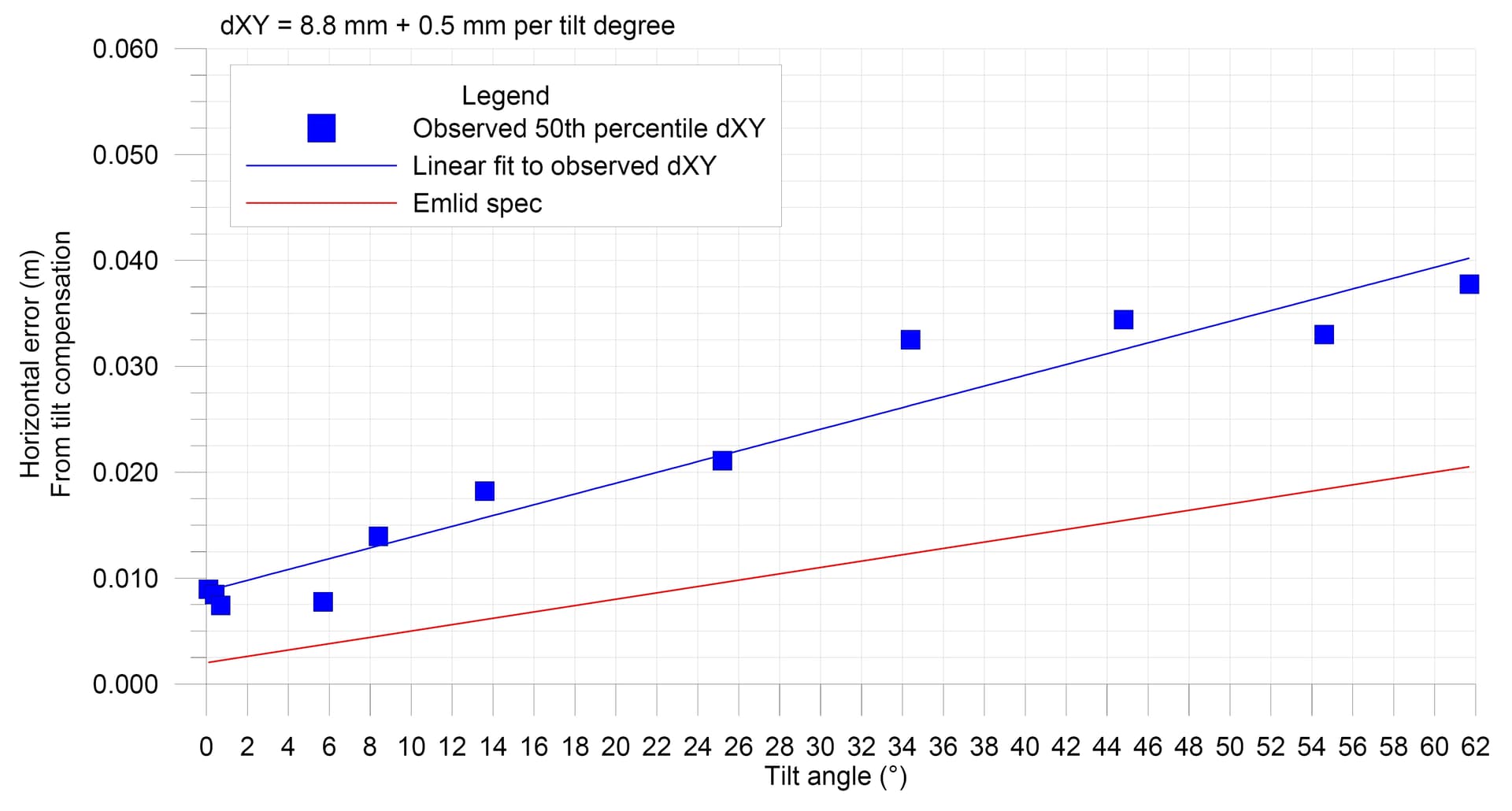
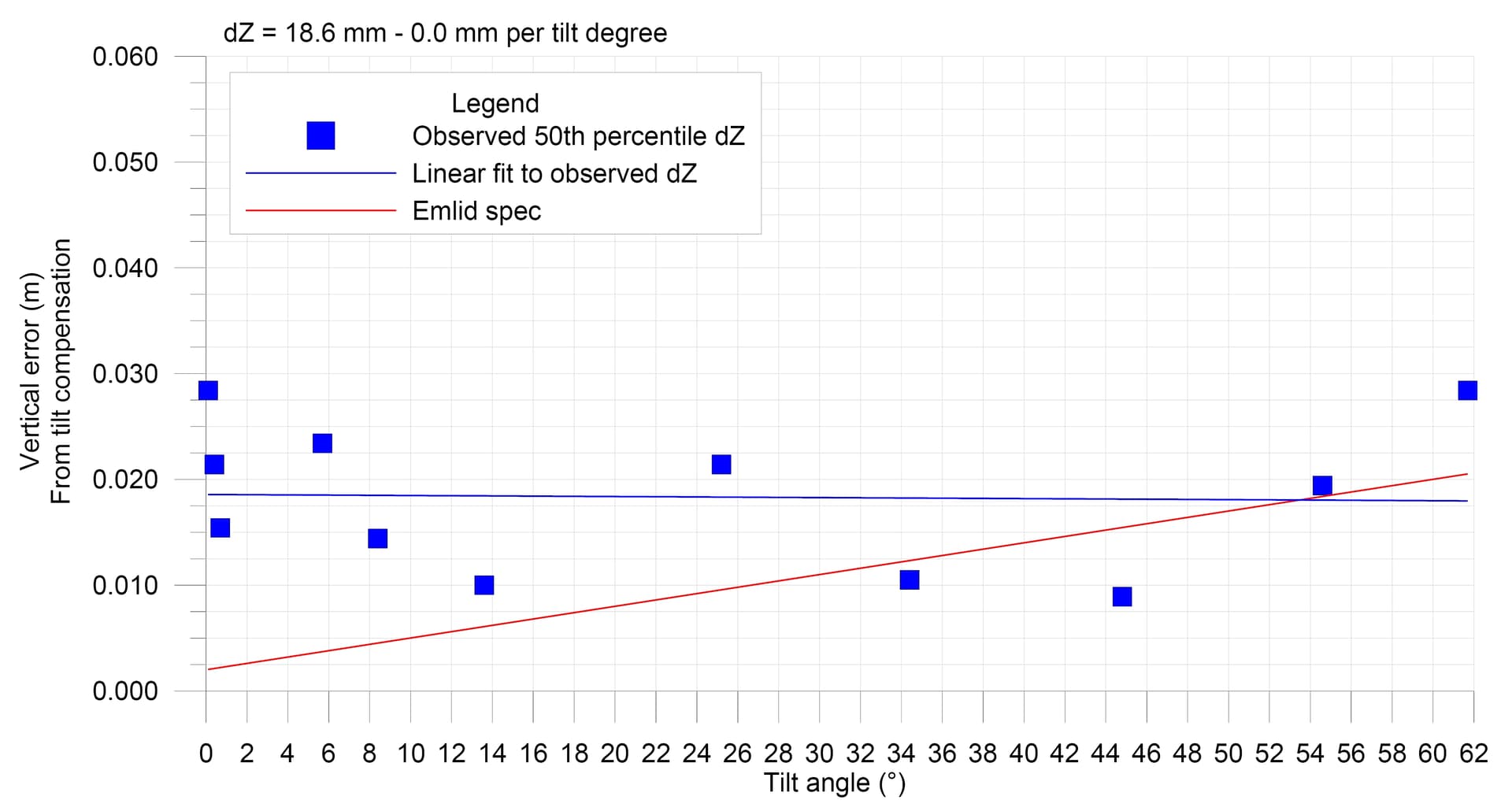
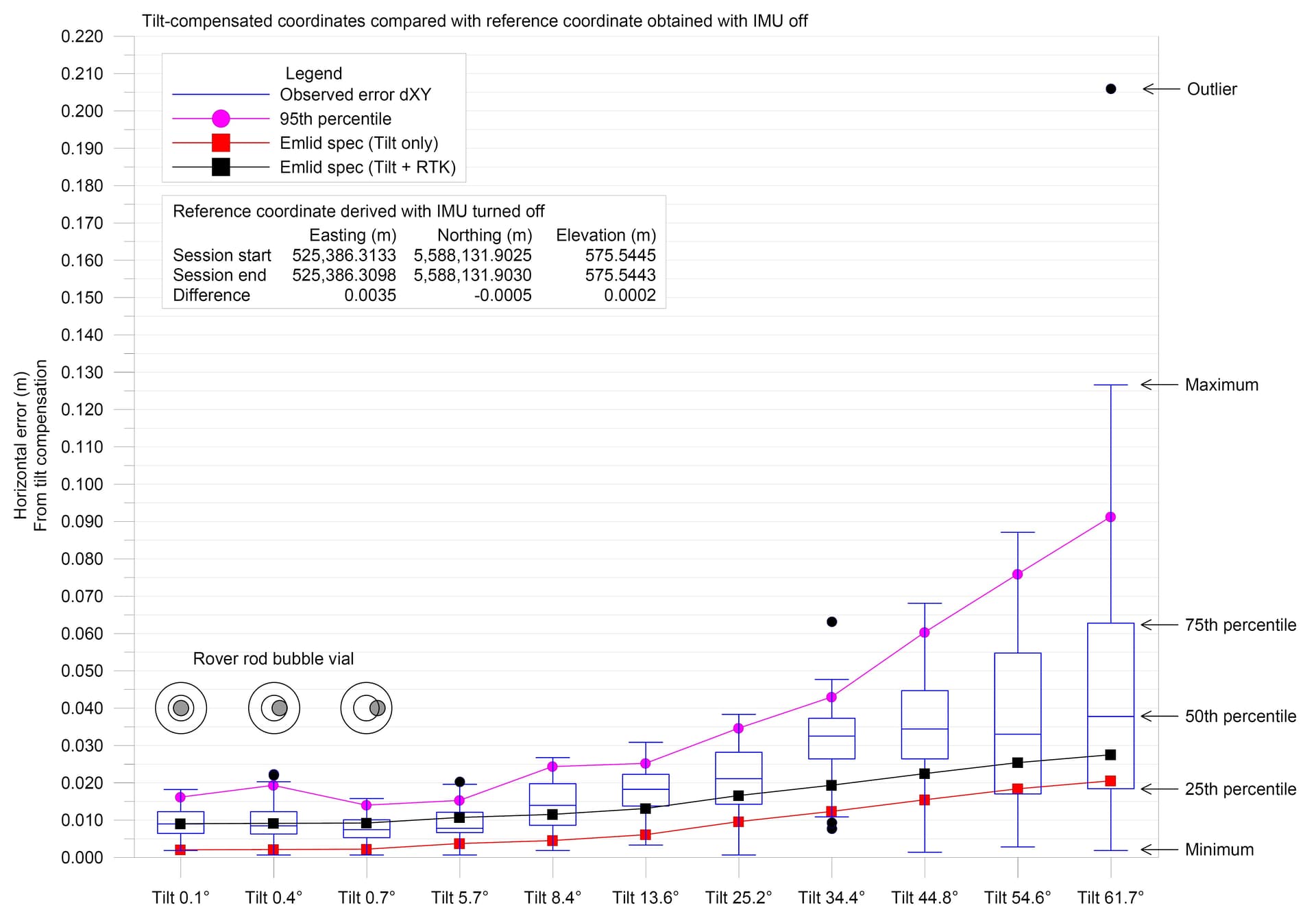
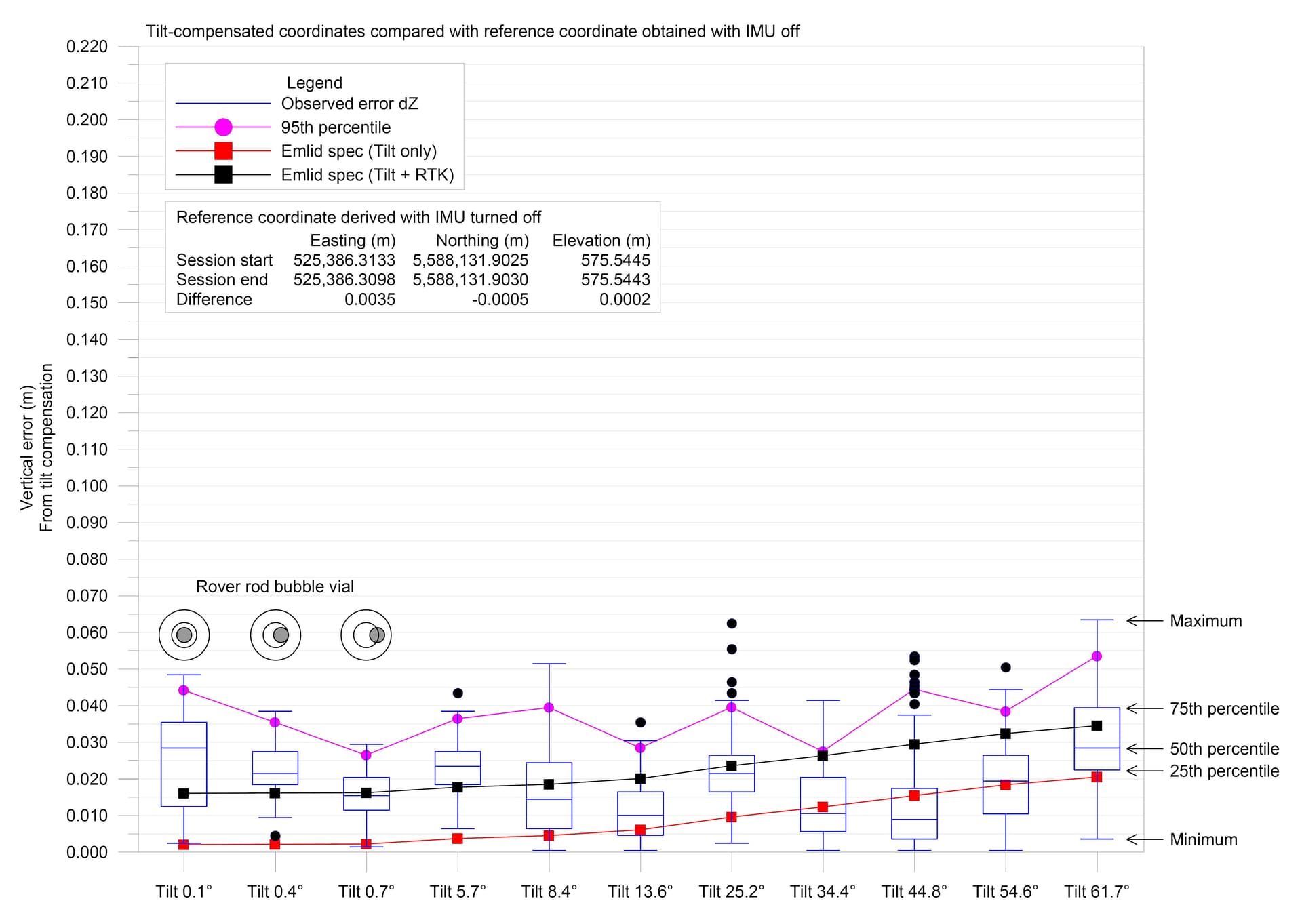
Below are plots showing the results for 50th percentile errors.

2 Likes
A key finding I take from this test is that the tilt compensation does not perform the way I was hoping it would. I bought the RS3 hoping that the IMU would make my readings taken with a plumb rod even more accurate. It turns out the opposite is the case. For tilt angles up to about 0.5 degrees, in which the rod is plumb or close to plumb, turning the IMU on will only increase error relative to if the IMU was turned off, particularly for elevation. Very rarely would I have a need to make a rover reading with the rod tilted. The vast majority of my RTK work requires the best possible accuracy, not the kind of accuracy you get from having a tilted rover rod.
If an accurate reading is needed and it is possible to plumb the rod, it would be best to turn the IMU off.
2 Likes
Hi Joe,
First of all I want to thank you for the quality of your reports and data presentation.
We are actively looking into the numbers which you have shared, the accuracy doesn’t align with our testing so far, so we are trying to understand what the difference might be. This is the first week since we have shipped these devices to the customers, so we are still learning about how the system is being used in the wild.
I would like to report on our finding so far and clarify some details about the specs.
On the specifications:
-
We list our numbers as additional to RTK error, so in order to arrive to the total error budget, you need to add these. RTK + 2 mm + 0.3 mm/° . Every shot is affected by the RTK accuracy, not just by the additional error from tilting. The system will also estimate the real-time accuracy, show it in the interface and store for every measured point.
-
The spec is for a 1.8m pole, so for a 2.4m pole the error budget will be 30% higher.
Our findings:
The particular type of test with very small incremental changes in inclination really seems to be an edge case which we do not handle well right now. This is something that we didn’t take care of as we expected that in typical data collection or staking there will be some motion when walking between points. The IMU needs some motion to continuously self-adjust or complete stillness. The tiny changes are not giving it enough motion, but are also not letting it consider itself static. We are already working on addressing this. I completely agree that if the system indicates that is ready, it should be ready. We will change how the indication works in this scenario.
There are outliers at angles over 30 degrees and we are really keen to investigate how did those happen.
May I ask you to send us the exported .csv from Emlid Flow for this session, where you took 100 readings for every tilt angle? You can send it to me in private messages, or to our support email: support@emlid.com
7 Likes
Thanks igor.vereninov. I will send you the raw csv as well as an Excel file that organizes the readings so you can make sense of them.
I just want to make sure you know that this latest test was done with the rover rod constantly moving in between readings, so the test closely replicates the type of procedure that would be used when making rover readings in normal practice. No tripod was used this time like in the earlier tests.
With respect to the subtraction of the RTK error, I must admit that I did not account for that, and by not accounting for that, it means my observed errors would come down depending on how you account for that error. I personally don’t think it would be appropriate to subtract the full reported RMS values (lateral RMS and elevation RMS). For example, here are the RMS values for each tilt angle:
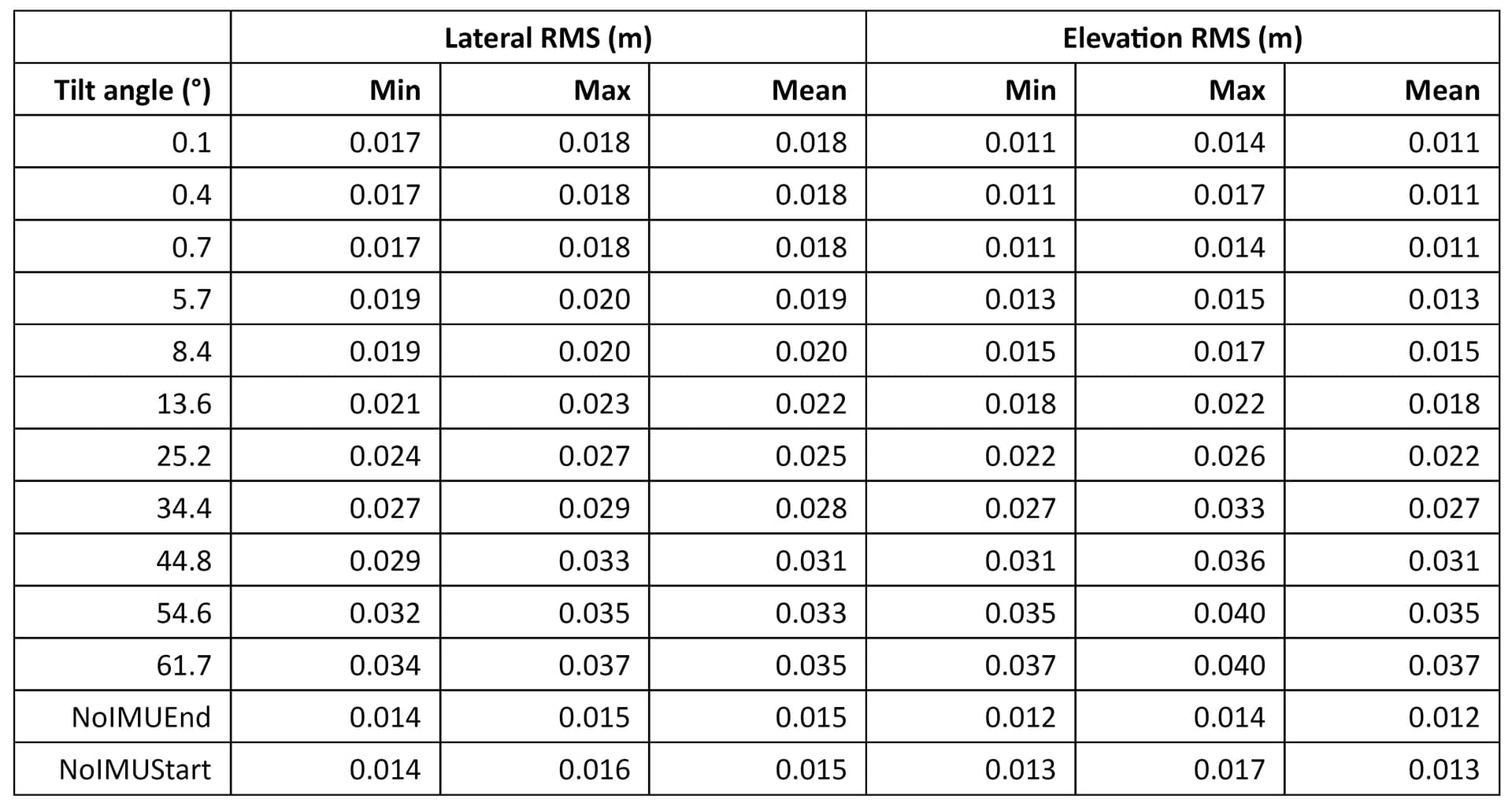
Look at how high the RMS values are for higher tilt angles. The high RMS value is reported when the receiver is tilted, and this has nothing to do with the IMU. But if you subtract that RMS value, you are making it seem like the tilt-compensated values are more accurate than they really are, as you are only allowing the portion of the error that is inferred to come directly from the IMU to feed into the error estimate. That might be an ok way to define the IMU accuracy, but if Emlid only refers to the IMU portion of the error in their marketing descriptions of the performance of the RS3, then I think there’s a pretty good chance people are going to get the wrong idea about how accurate their measurements are going to be when they tilt the rod 20 to 60°.
When I think of trying to characterize the accuracy of a tilt-compensated value, I would want to compare the tilt-compensated value against a carefully made reading with IMU turned off. When you look at my reference coordinates in my test (listed in the box plots), the reference coordinate I used was the mean from the start and end of the session. The coordinates at the start and end only differed by 3.5 mm horizontal and 0.2 mm vertical. Meanwhile, the mean lateral and vertical RMS values for the reference readings are 15 mm and 12 mm, respectively. I argue that the RTK error in the reference portion of my test is essentially negligible, and that is why I did not subtract it when deriving error values.
What my analysis shows is the comparison of the tilt-compensated rover coordinates against the mean reference coordinate, which I established with IMU turned off using the kind of practice I use when making accurate readings. I based my comparison on that benchmark because to me that is the comparison that is most relevant to my use of the RS3.
My intended use of the RS3 is maybe different from what other people might be intending. What I was hoping it would do is make my plumb rover coordinates even more accurate by eliminating the leftover error that comes from not perfectly plumbing the rod. So for me, the comparison that makes sense to consider is the comparison of taking the time to make a careful reading versus making a quick reading and seeing if the IMU will pick up the slack. To me, I think the results from the first three tilt angles in my analysis accomplishes that comparison.
It seems to me that the IMU is not designed for my intended use. The lesson I have taken from this is that when I need the best accuracy possible and am able to plumb the rod, I will be sure to turn off the IMU, as it seems to only increase the amount of error not decrease it.
1 Like
Just from the specs alone, would never expect to get BETTER results. Tilt is more a “convenience” with some tradeoff. Otherwise, use a Total Station or even a much more pricier option, or both. I.e. Leica AP20 AutoPole.
- RTKH: 7 mm + 1 ppm
V: 14 mm + 1 ppm - TiltRTK + 2 mm + 0.3 mm/°
3 Likes
That really depends on your baseline. The 0.7 cm and 1.4 cm vertical will always be present as well.
This is the way. The IMU adds its own error budget on top. Having a properly leveled will always better for your error budget, but each observation will take longer to setup. Classic trade off.
6 Likes
igor.vereninov, timd1971 and wizprod, I think I am slowly starting to see one of the key things you guys are trying to get through. I need to shift my red lines up to account for the RTK error (7 mm horizontal and 14 mm vertical).


1 Like

“The IMU-based tilt compensation in Reach RS3 enables you to make measurements with up to 60 degrees of tilt while still staying within 20 mm of accuracy.”
If we use the specs listed above, should this statement not say 27 mm instead of 20 mm. And I would still argue that for 60 degrees, my 50th percentile horizontal error was 38 mm.
27mm. Probably so? I guess should state about 36 deg for 19.8mm then for Horizontal.
I’m sure Emlid will clear things up with their reasoning.
Hello. interesting analysis, interesting conclusions, that’s why I gave up emlid some time ago. In geodesy, there is no room for uncertainty in the operation of equipment. I will never return to the Emlid brand. Regards, Damian
1 Like
I guess if the 2.4 m rod height means the tilt-related error budget would increase by 30%, then the spec for 60 degrees of tilt would be 27 mm plus 6 mm, so for horizontal error would be 33 mm, which is only slightly lower than my observed 38 mm.
Thanks Damian. I certainly haven’t given up on Emlid. Upon refection, had I read the spec carefully, I wouldn’t have been expecting the IMU to be making plumb readings more accurate.
My question is: why are you on the forum if you do not like using Emlid products ?
In today’s GNSS world of receivers, Emlid’s products are great for entry level use in land surveying or photogrammetry.
You can use Emlid’s products for geodetic work if the user has adequate knowledge in geodesy and proper procedures are followed.
The accuracies of their products may not compare to the world class receivers such as Trimble, Leica or Javad but as
you probably know you get what you pay for.
I have the M2 and RS2 receivers and in many cases they compare well with the “world class” receivers such as the Javad equipment we have if they are used properly.
I’ve been in the land surveying profession for 50 years and have been licensed for almost 40 years. We’ve used all the “world class” receivers from the early days of GPS (Trimble 4000 SLD series) until now with the Javad Triumph LS+. I like the simplicity of Emlid’s products whether they are used for “static” or RTK positioning.
Emlid’s products may not have all the high accuracies and the “bells and whistles” as the high priced receivers, but they are great receivers and have a low cost for those that can’t afford such luxury receivers as Javad or Trimble.
8 Likes
Wondered the same thing. ![]()
Well said. ![]()
5 Likes
Apart from the well-known fact that all manufacturers state their precision in CEP (median, 50th percentile) or DRMS (63th percentile) in their specs?
1 Like
Well said. I’m not a licensed land surveyor, but I am a geoscientist who enjoys incorporating GNSS methods in my practice. I have been very impressed with my RS2s for static and RTK. I’m sure I will be happy with the RS3 and will probably discover that there are more uses for tilt compensation in my work than I can currently envision.
I’ve been thinking it would be interesting to see if I can borrow a Trimble R12i for a day to test tilt compensation on it and on the RS3 in matched tests. I will send my local Trimble sales person an email to ask about doing a demo with the R12i. There’s a part of me that suspects that the R12i will perform about the same as the RS3 in tilt compensation. Any thoughts?
2 Likes
I found it interesting that GNSS equipment tends to get rated according to the 50th percentile. I remember from my days as a rock climber that many carabiner manufacturers rate the minimum breaking strength of their carabiners at the 3 sigma level, or roughly 99th percentile. It seemed strange to me that GNSS equipment would only be rated to the 50th percentile. Any comment on the significance of the 50th percentile in this context or why GNSS equipment ratings aren’t based on higher percentiles? I usually see surveyors reporting the accuracy of their work to the 95th percentile.
This is a great thread as I am considering replacing my RS2 with an RS3. JoeSixPack has done great analysis and reporting. Are there any other RS3 users that can share their experience? I think I will hold off until there is a brighter outlook for the RS3 in the Forum.
1 Like
Thanks Curt.
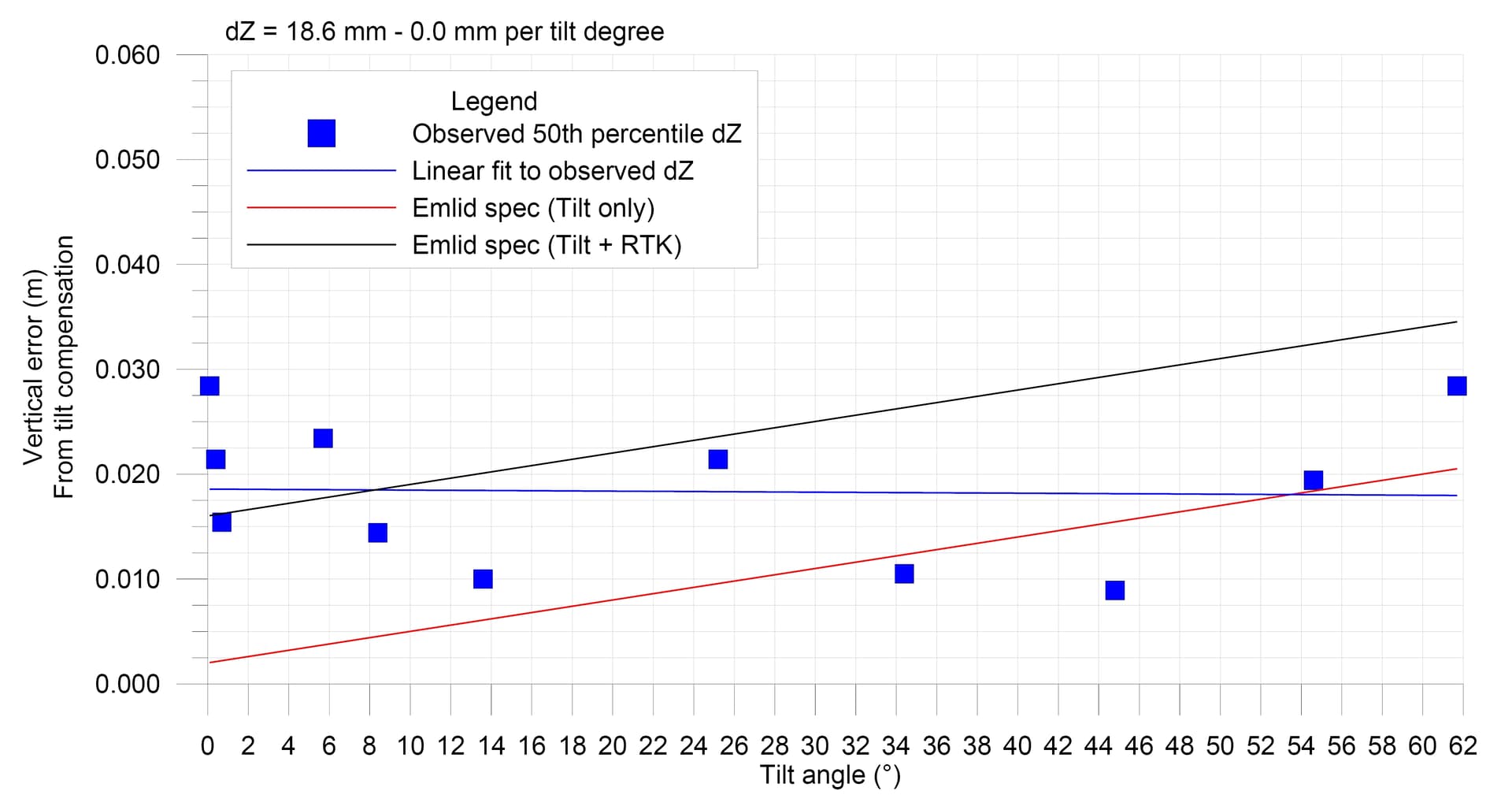
Just for the record, now that we have gone through this exercise, it seems my latest test verified that the RS3 is pretty much performing to spec. So, I would definitely not discourage anyone from picking up an RS3. In the plot below, I added an orange line that accounts for the 30% increase in tilt-related error associated with using a rod height of 2.4 m (as mentioned by igor.vereninov earlier in this thread). The plot shows that the orange line is at or is pretty close to the 50th percentile, which the Emlid spec is based on.
It seems I may have identified an edge effect in my earlier tests, and that was what originally got me concerned about whether the RS3 was performing up to spec. But that edge effect is something that would only occur if you lock the tilted rover rod in place and thereby not give the IMU the motion it needs to function properly.
The other issue that I encountered was that tilt compensation in essence did not seem to work the way I was expecting for tilt angles less than let’s say 1 degree. In other words, you cannot expect to put the rod bubble only partway into the bubble vial circle and expect tilt compensation to give you a reading that is as accurate as you would get as if you carefully plumbed the rod. It tentatively seems to me that you might want to turn the IMU off when making a plumb reading if you want to get the best possible accuracy out of the RS3, as it seems that having the IMU on for plumb readings might be introducing slight additional error, particularly for elevation.
So in summary, despite my initial concerns I do not see any problems at all with the RS3 as long as you are using it properly and don’t have unrealistic expectations. I hope this thread does not discourage anyone from picking one up today! I’ve had two RS2 receivers for a couple years and I have been very happy with their performance. I have also been impressed with Emlid support and with the Emlid community forum.
Even if I don’t generally have a great need to make readings with a tilted rover rod, I appreciate that the IMU provides tilt angles on screen in Emlid Flow and the tilt angles are recorded into the rover coordinate csv. I have found that being able to look at tilt angles on screen in Emlid Flow can help with adjusting the bubble vial on the rover rod. I find that is a nice function I am getting in the RS3 that does not exist in the RS2. It would be cool if the tilt angle could be displayed at the top of the screen next to the IMU status icon so you can see the tilt angle on the same screen as you are looking at when making readings.
However, I will state for the record that some of the marketing statements do appear to be slightly exaggerated (e.g., suggesting 20 mm horizontal accuracy for 60 degrees of tilt, when in fact the official spec would put it at 27 mm for a 1.8 m rod height and 33 mm for a 2.4 m rod height). Furthermore, technically, my test results found horizontal accuracy (50th percentile) to be 38 mm for 2.4 m rod height from 99 readings at an average of 61.7 degrees of tilt. But that is only from one test, and those same test results could perhaps be analyzed in a different way to arrive at a different summary.

6 Likes