



I am using the RS2+ as a base for RTK with a DJI Mavick 3 Enterprise.
I I have been able to connect to the RS2+ with my iphone, also have connected the DJI M3E to the RS2+.
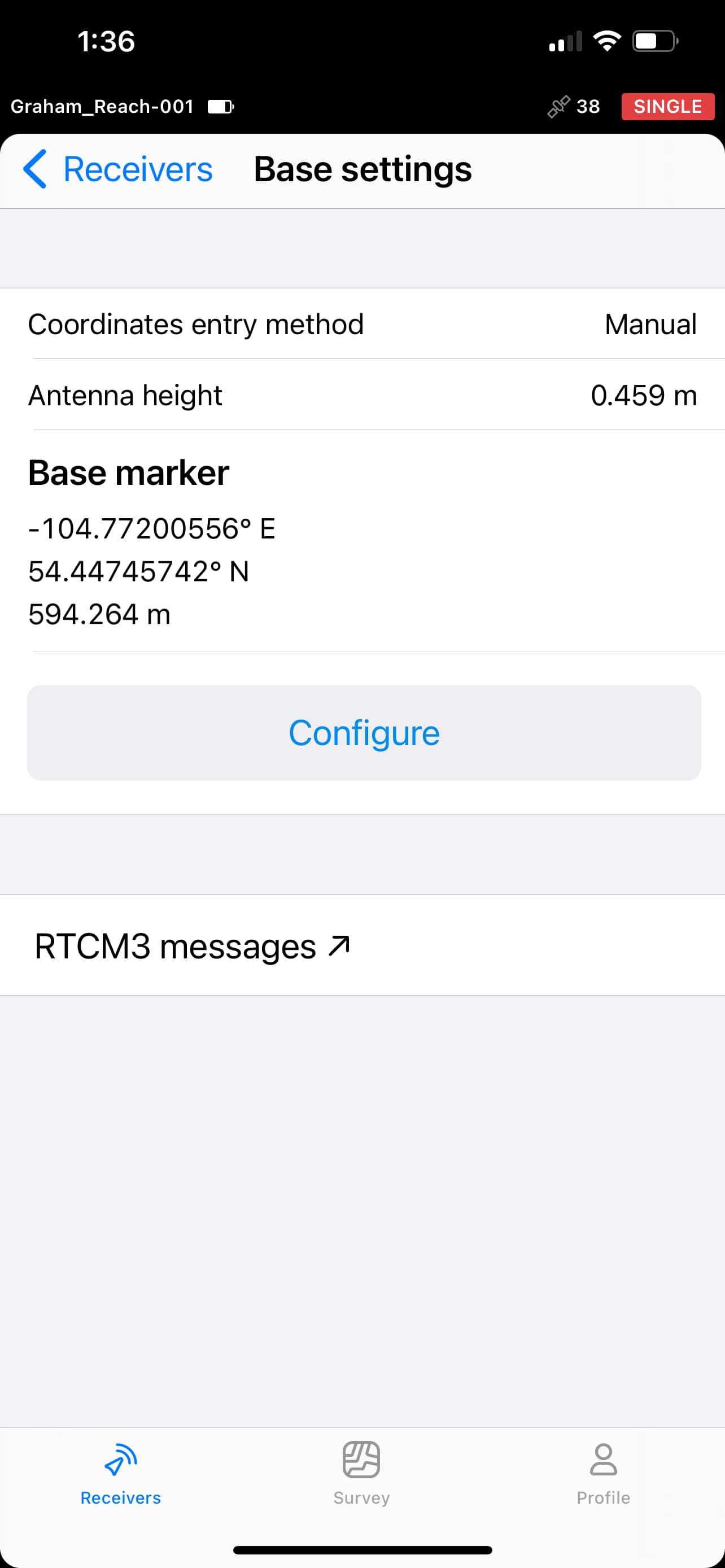
I have entered a known point and set up on the point.
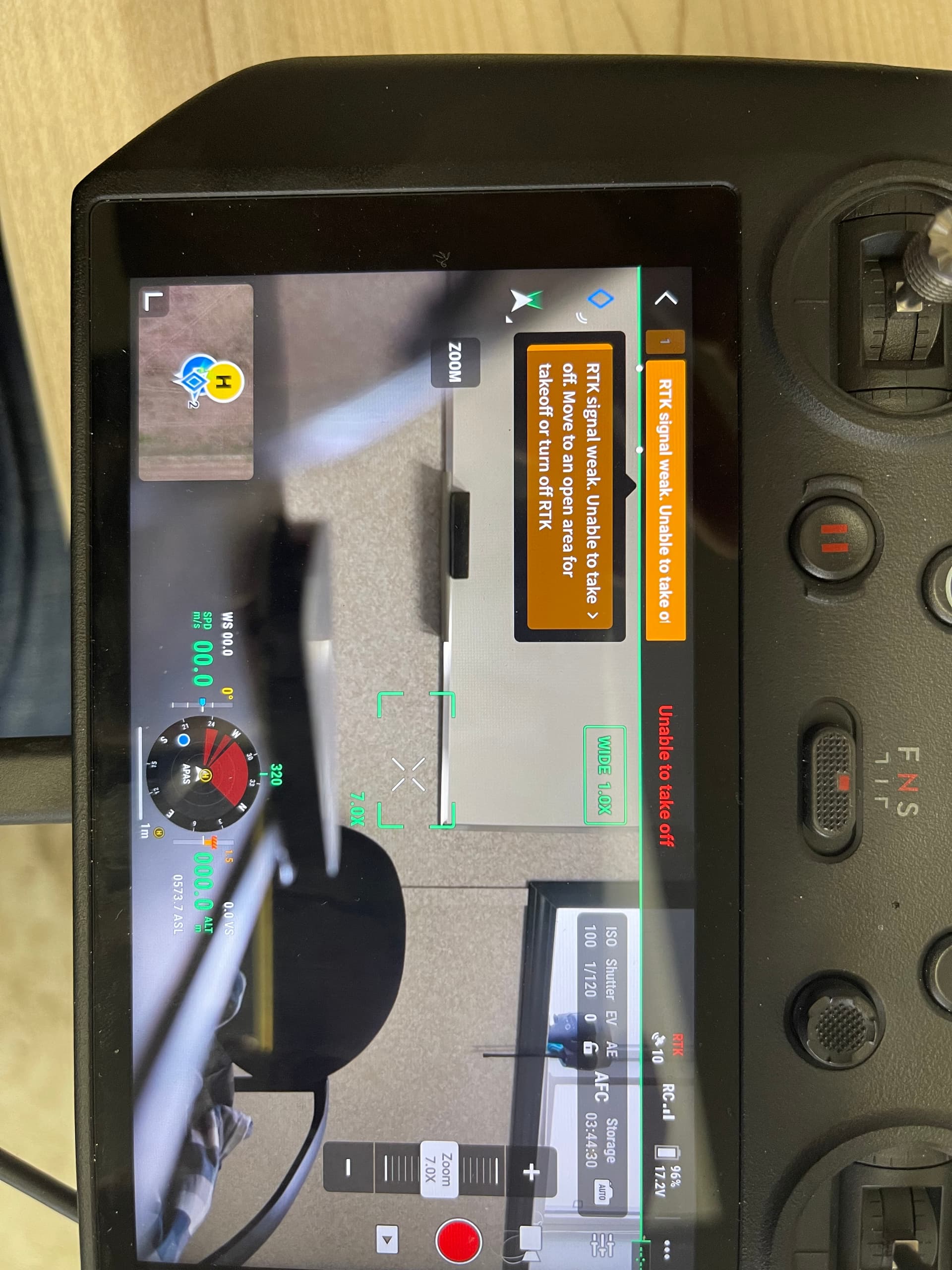
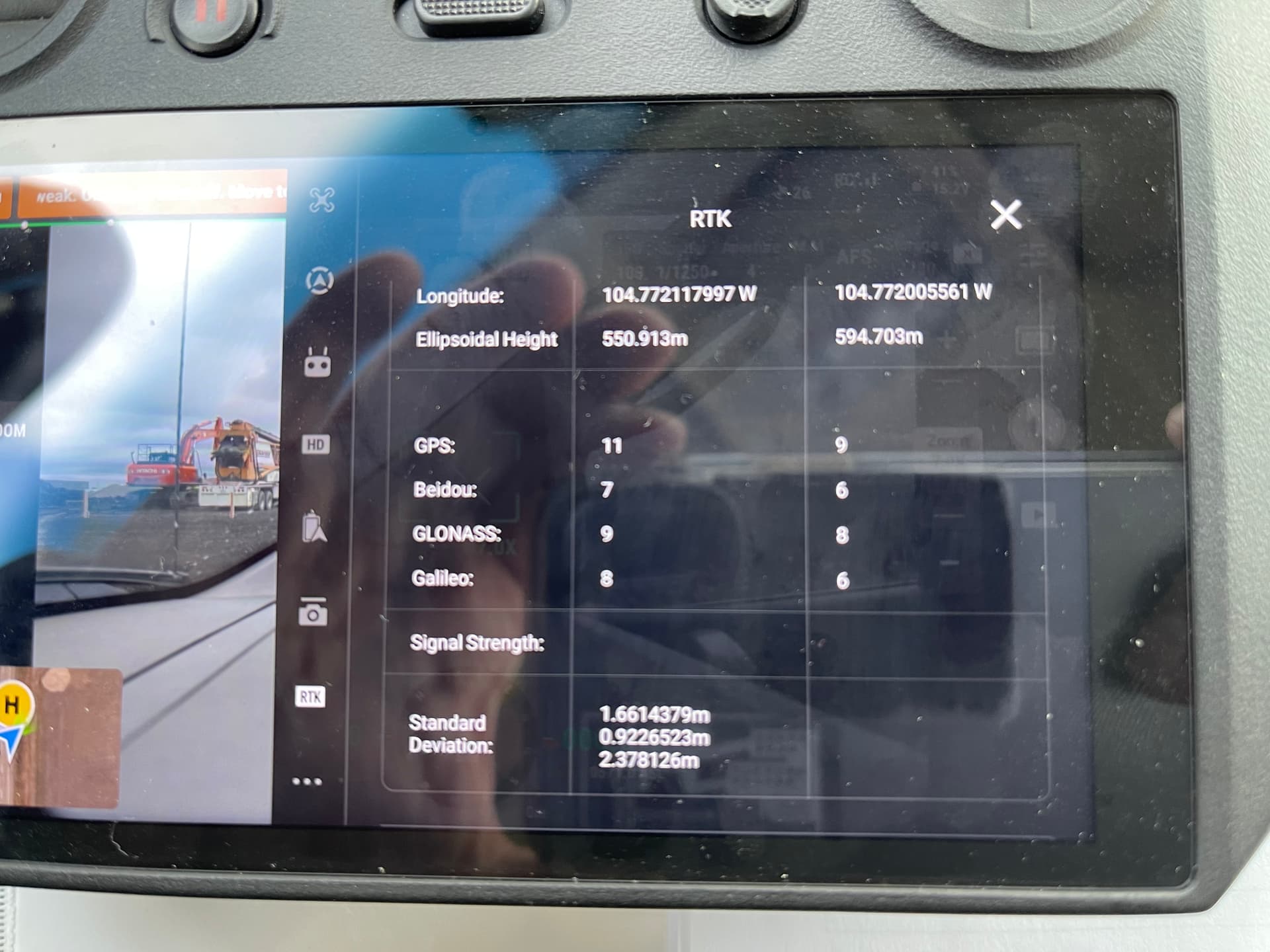
I can see connection to the base on the DJI controller but there is a message saying RTk signal low- move to an unobstructed area.
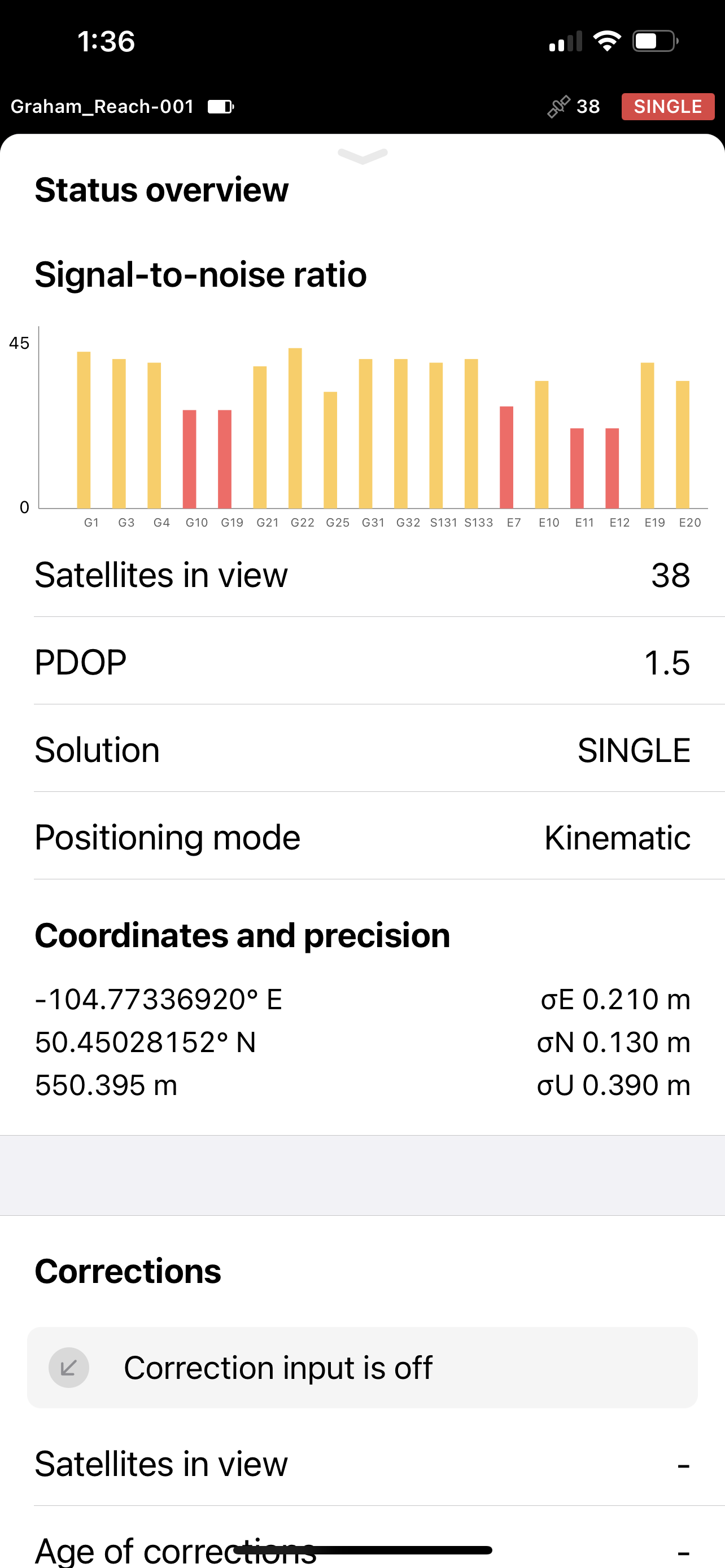
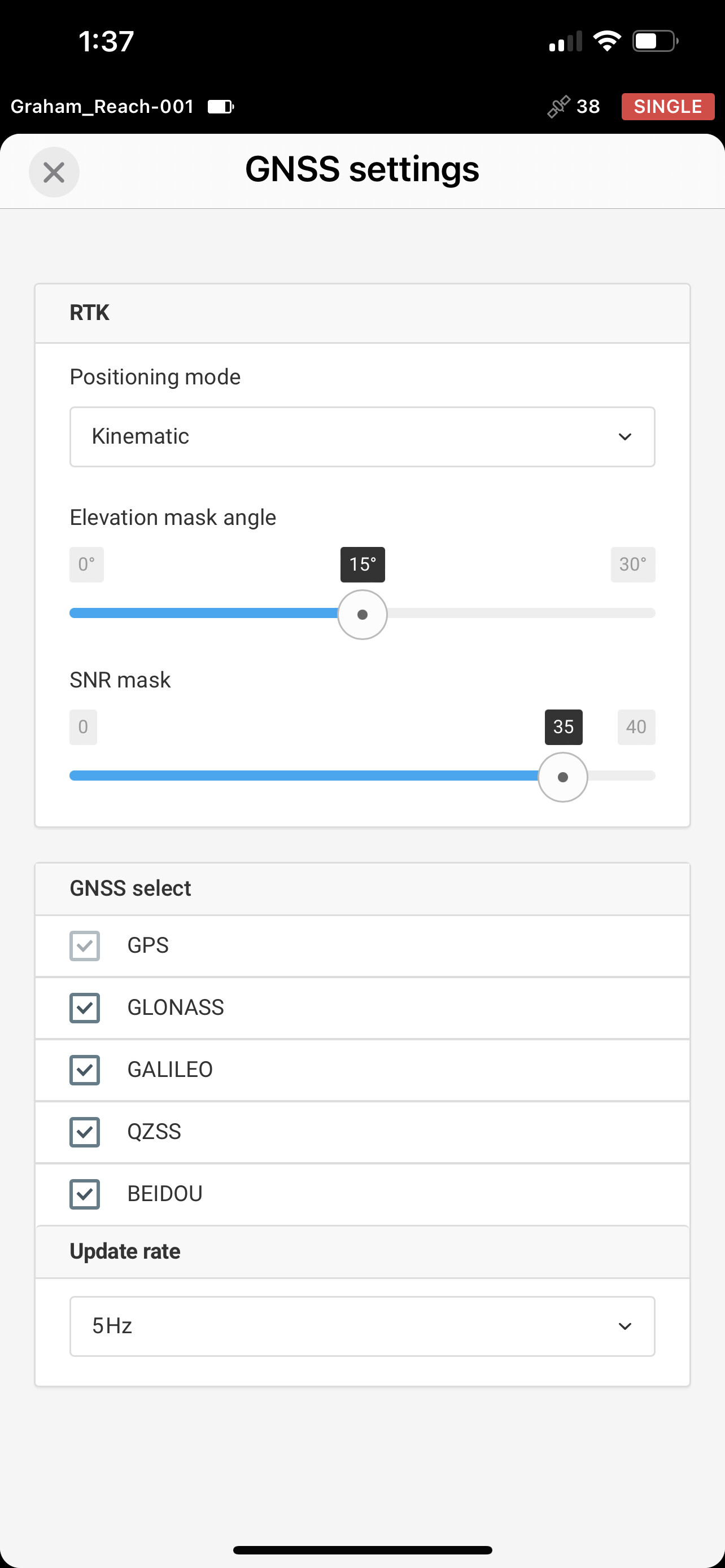
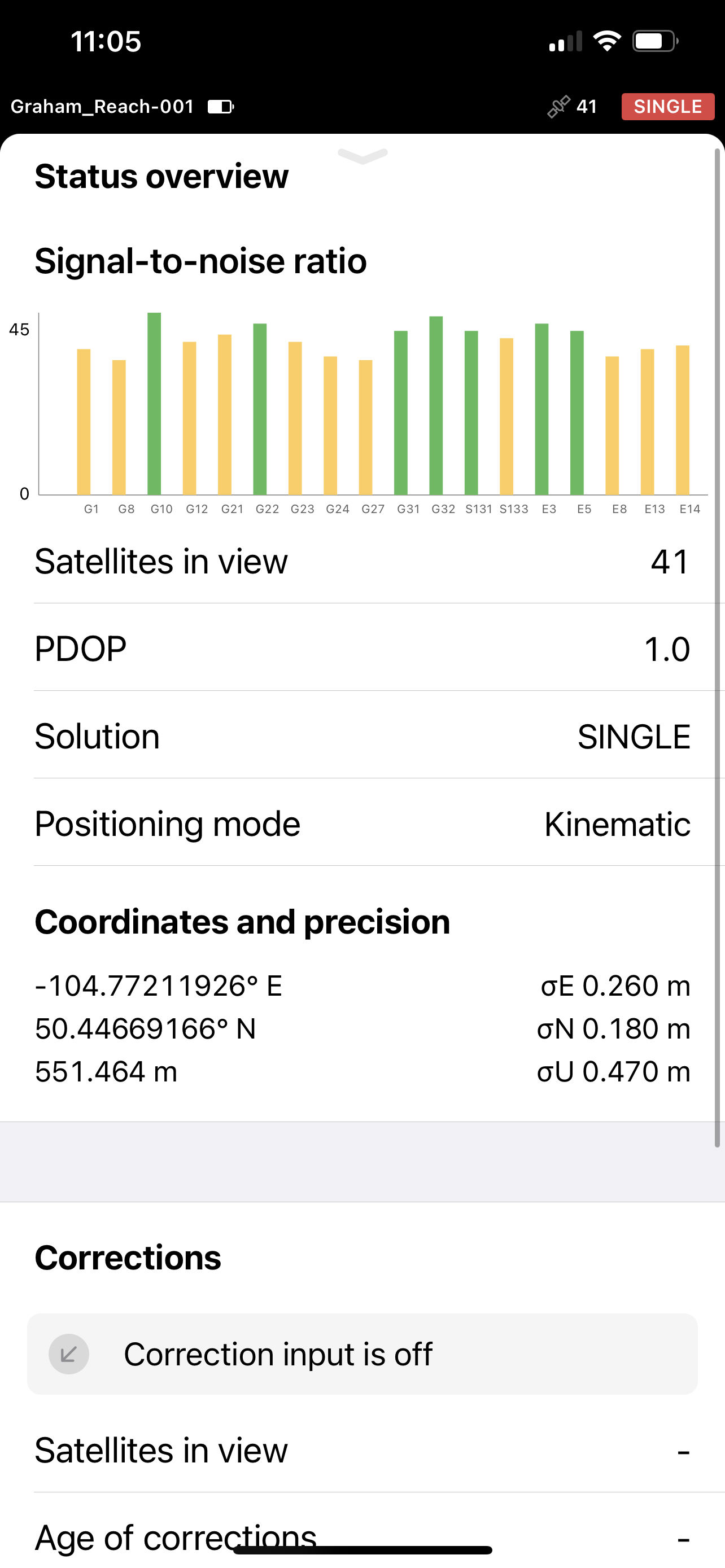
Lots of satellites in view. Tried both static and Kinetic for the positioning mode.
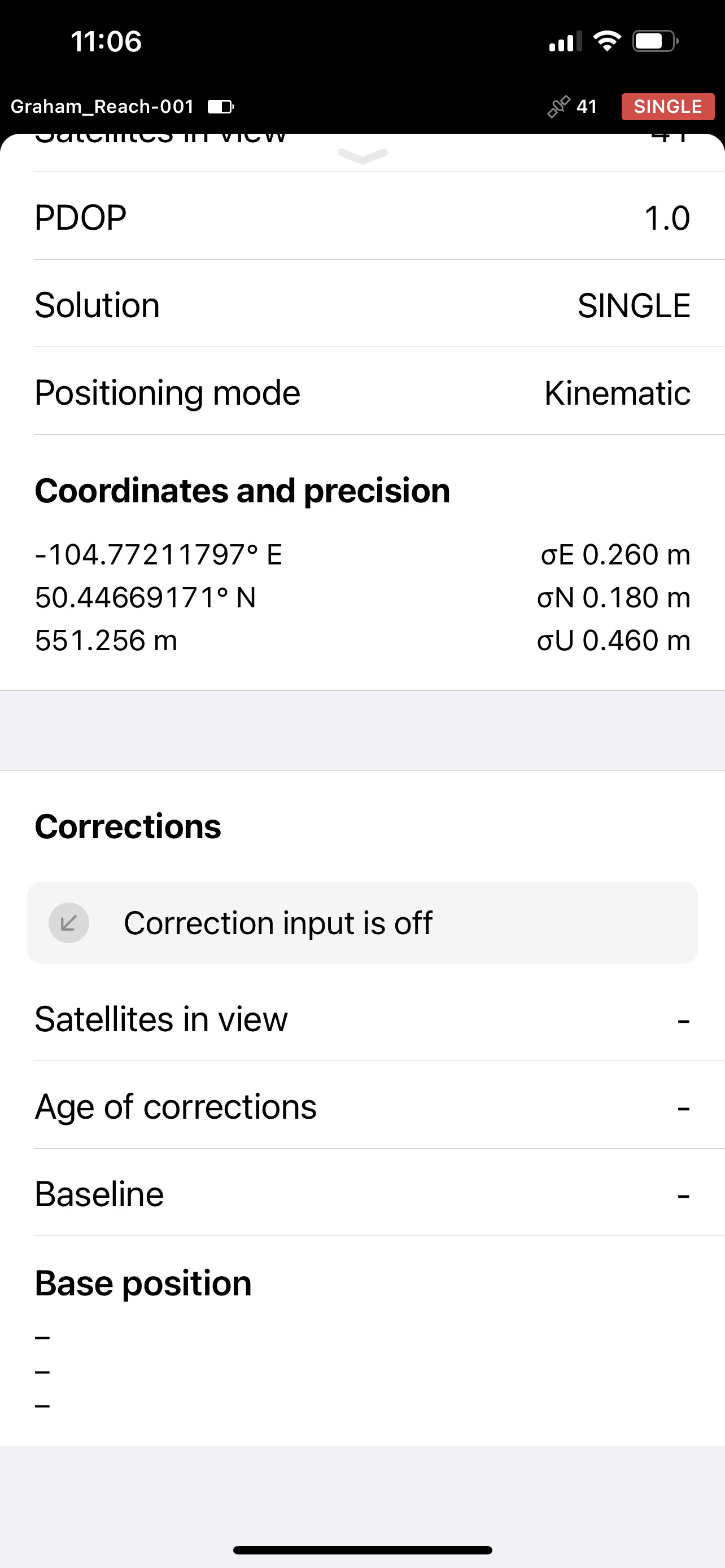
No matter what I do I get a message under corrections that says “waiting for corrections”
Any ideas?
Do you take this information from ReachView ? Because on the base side, this is not relevant information. The base does only one thing : it sends a RTCM message containing its GNSS observations and its coordinates. It does not need to compute its position continuously, so there is no requirement to get a FIX solution at the base. The message “waiting for corrections” is poping up, but you can ignore it as there is actually no need to bring corrections to the base.
Have you set up the base in an open-sky location ? From this message, I would say this is the drone that needs to be moved because it is the device with the obstructed area.
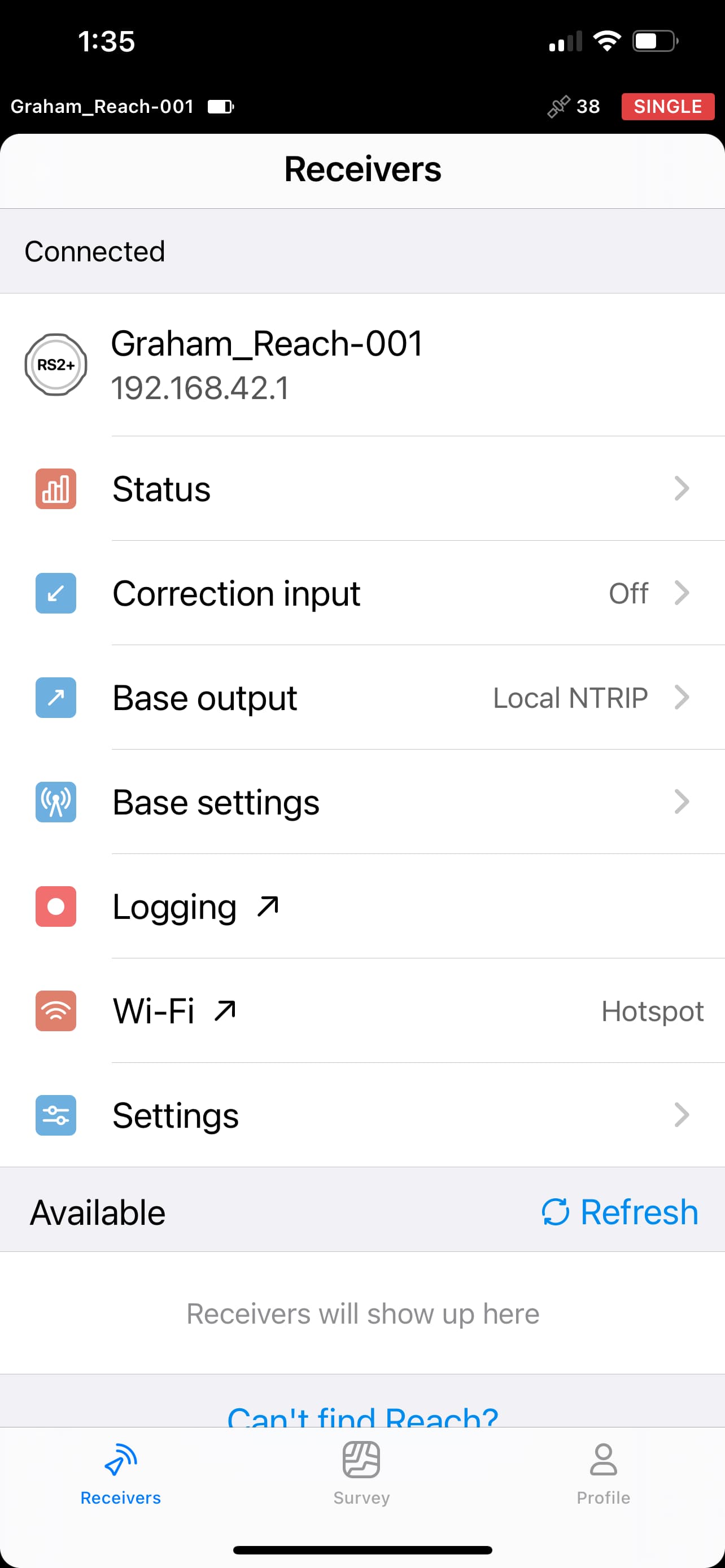
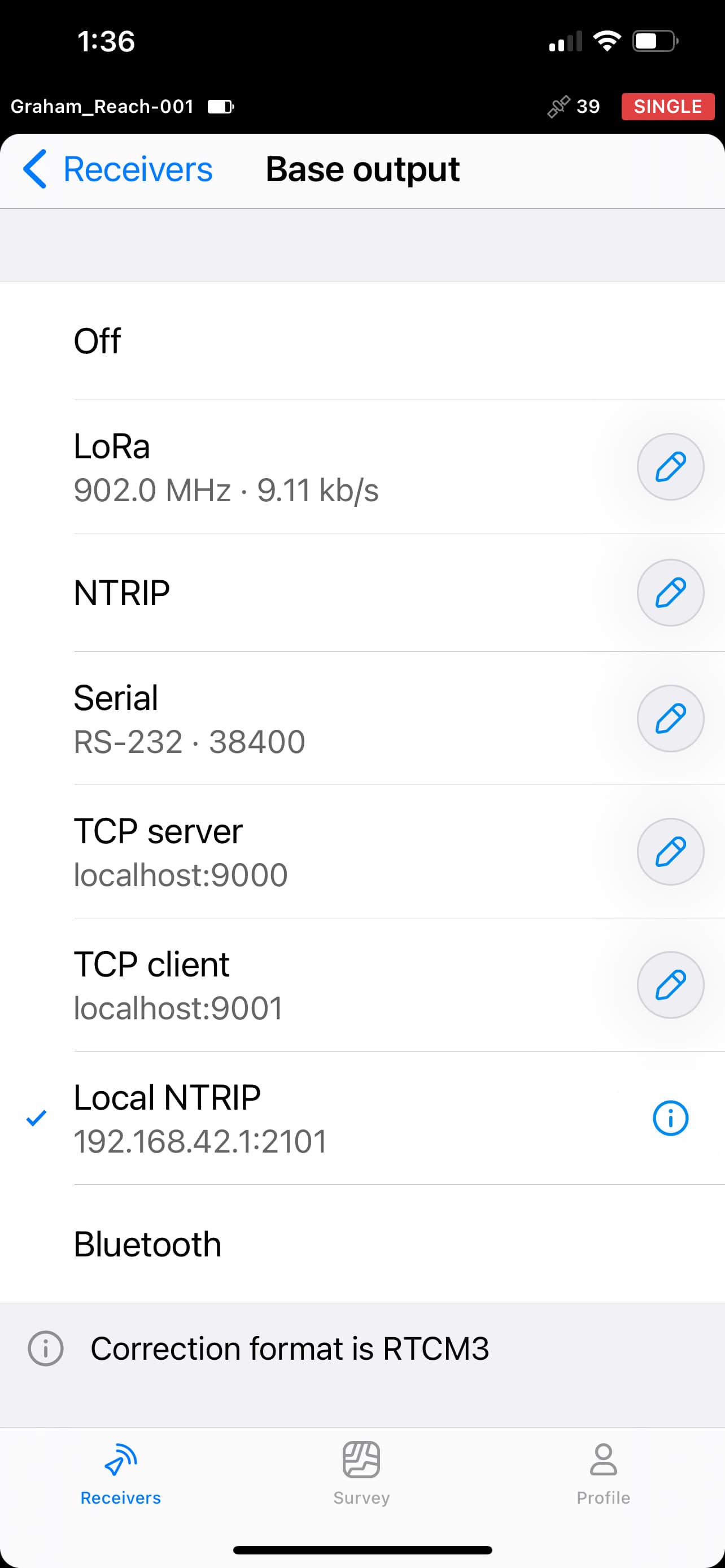
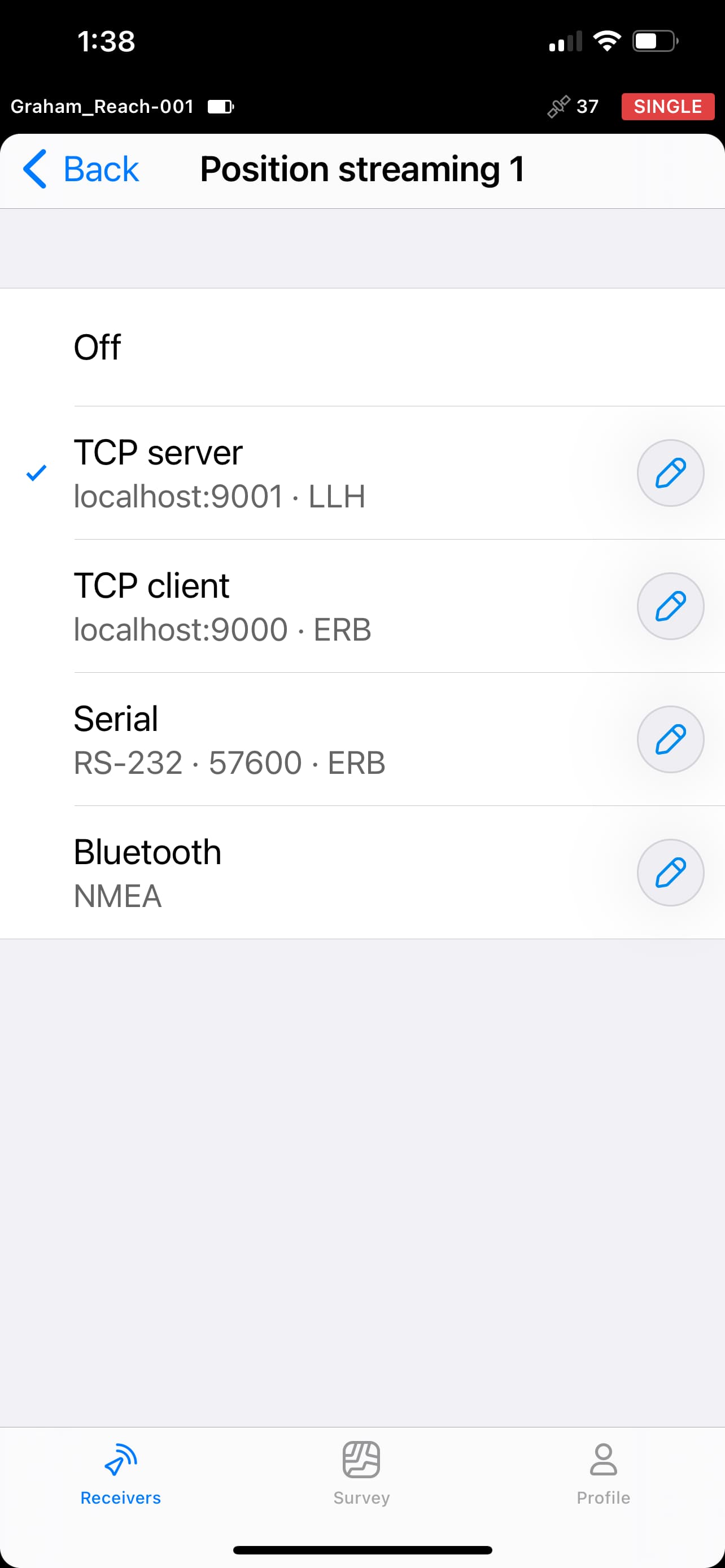
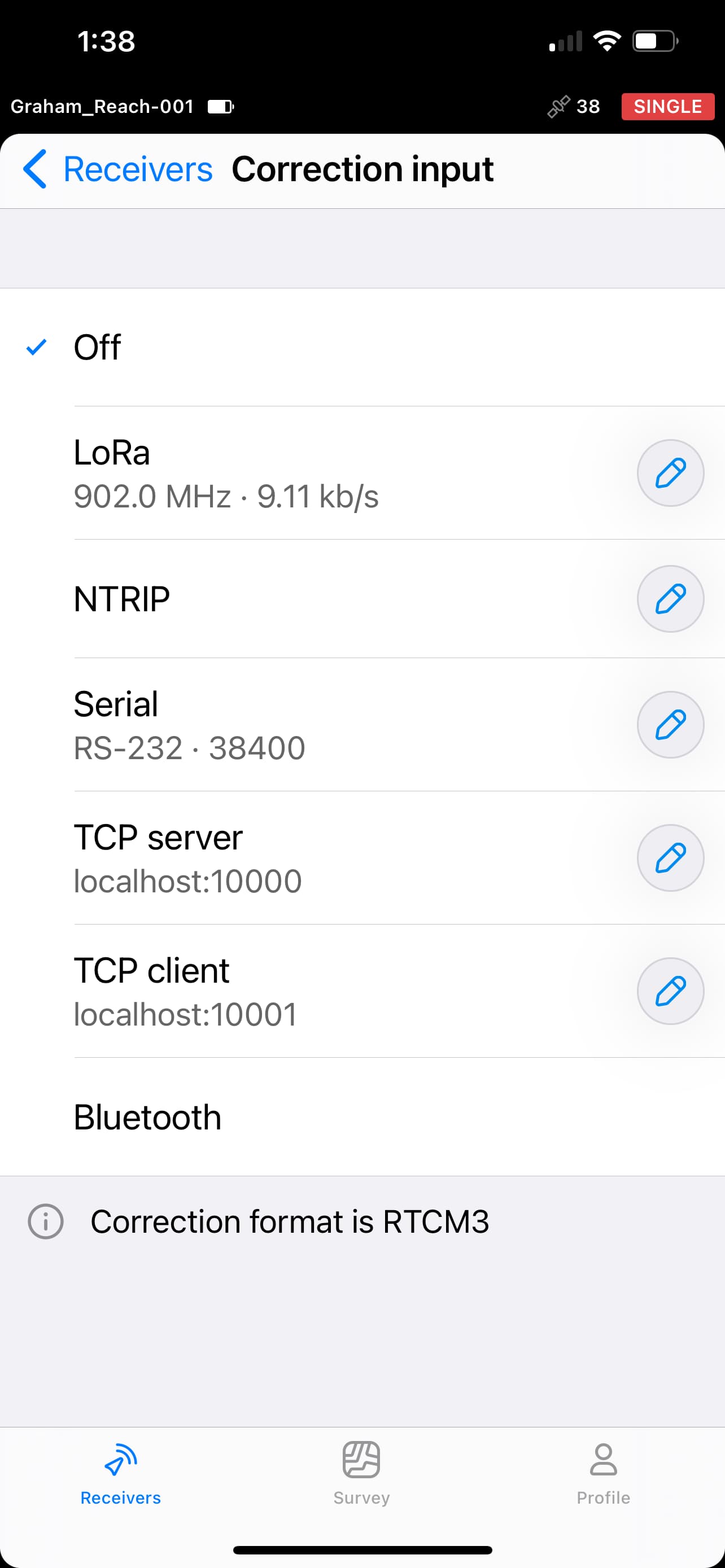
on the Reachview I have the base output as Local NTRIP. I turned the correction input off and have entered “manual” in the base settings and entered my known point I am setting up on. RTCM messages shows at the bottom of the base setting screen with an arrow to the right angled up and away from that text.
Would this be all I would need to do so that the RS2+ is broadcasting data to my drone? I can see a connection to the RS2 on the DJI controller screen.
If that is all I need to do I will go do some additional investigating.
Hi Peter, the other thing worth triple checking is the manual coordinate that was entered. If there is a typo or anything like that in which it is too far from where it thinks it should be, it won’t send corrections. You could flip it to average single temporarily, just to rule that out.
thanks-will do
Hi Peter,
Welcome to our community!
I see that Florian and Joe have already shared some good tips. Have they helped?
Hello – still having issues with connecting to our DJI Mavic 3 Enterprise.
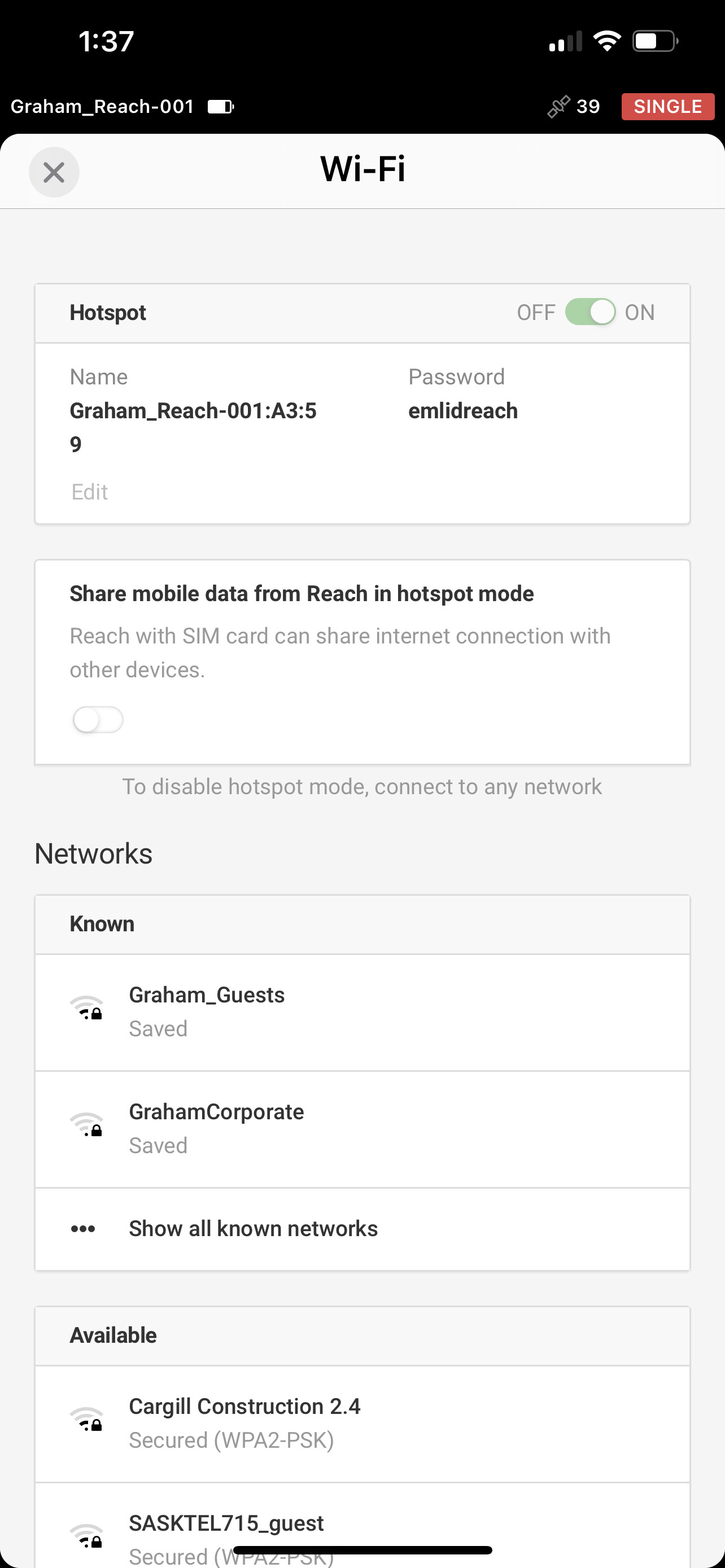
I have been able to connect to the RS2+ with my mobile device and the Drone via the Base’s mobile hotspot.
I can see the manual coordinate on the drones RC screen that I have entered in Reachview 3.
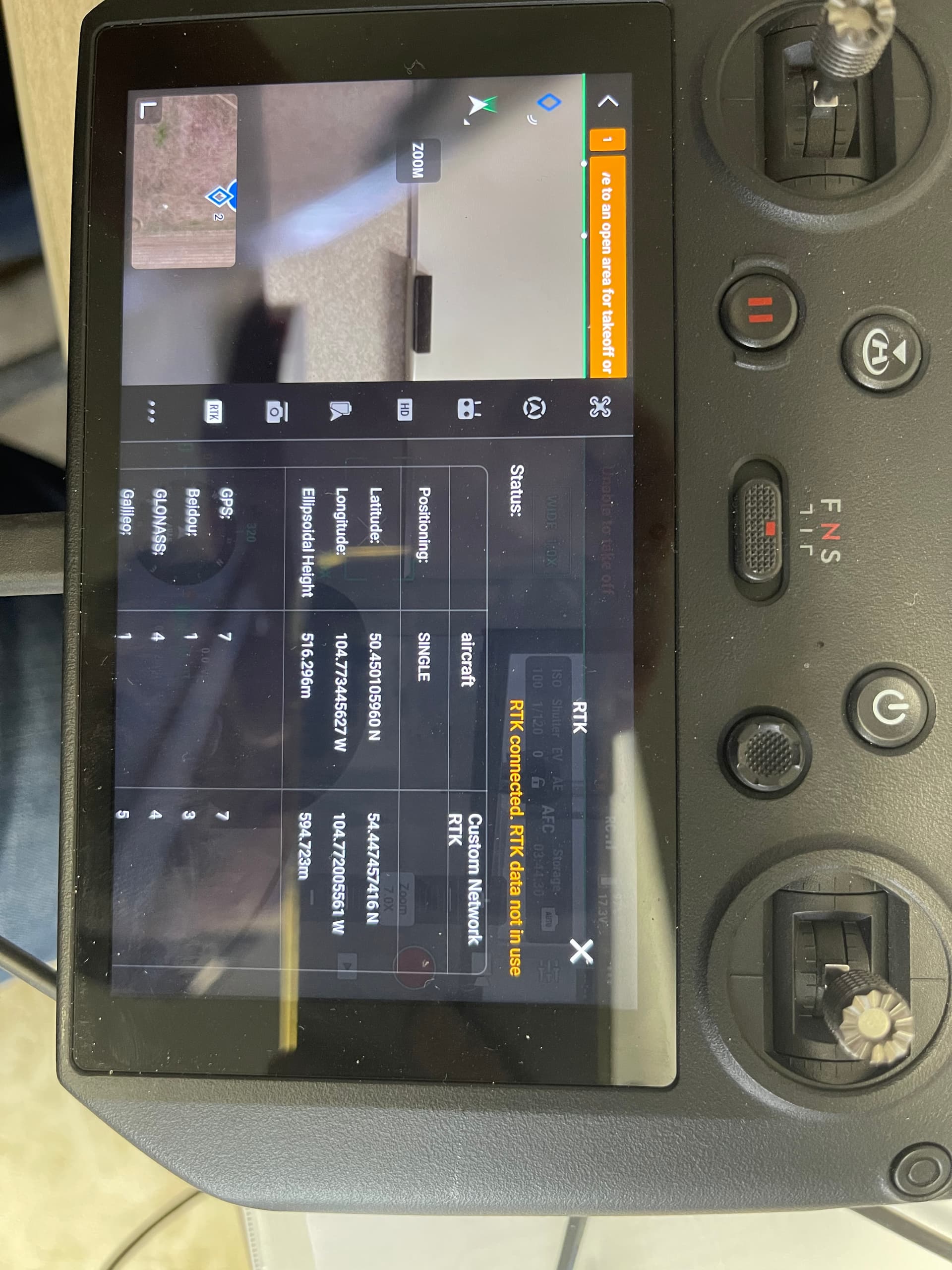
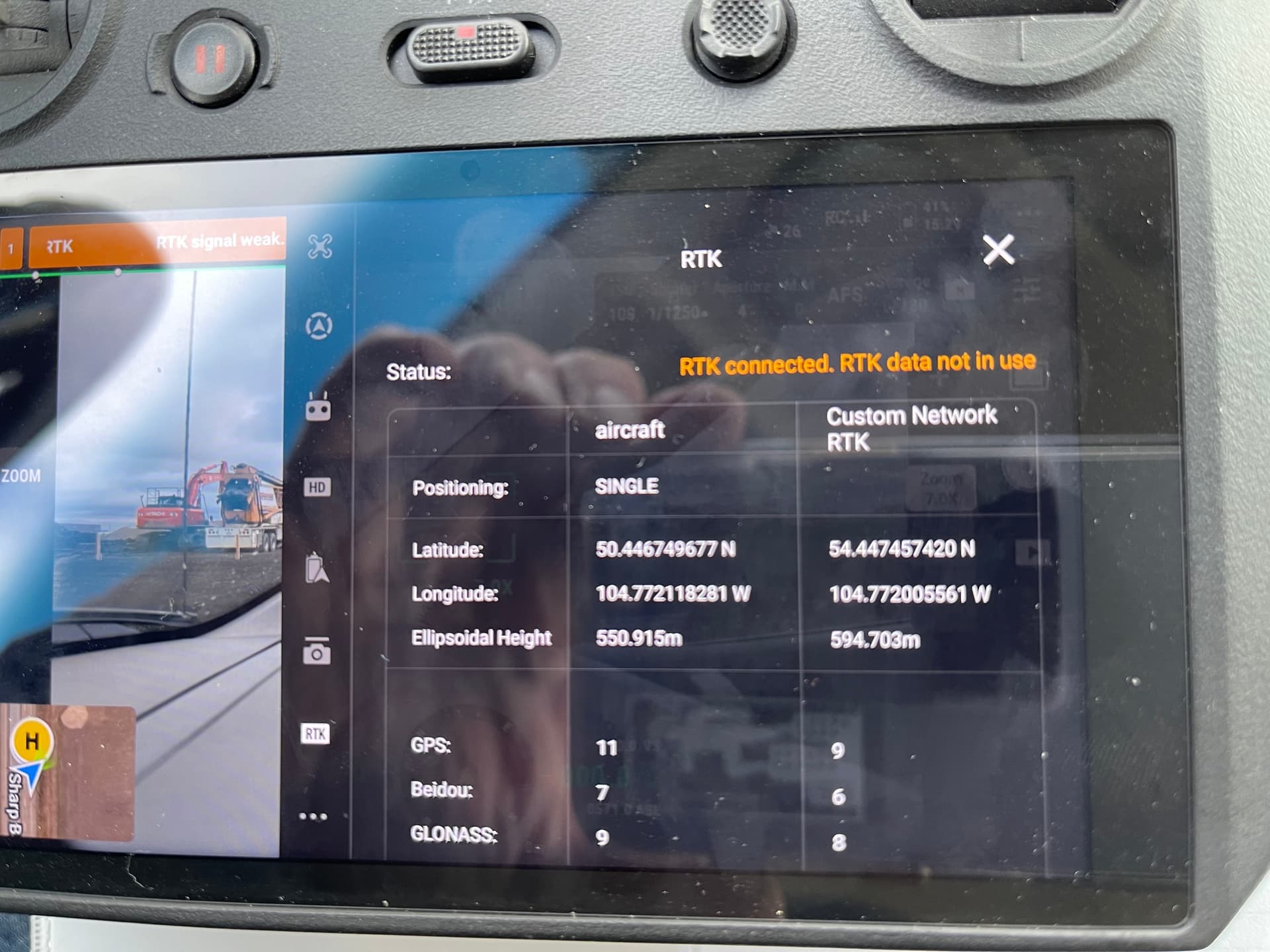
Yet nothing I do seems to get past the error message on the drone RC which says” RTK connected. RTK data not inuse”
See screen shots of every screen I could pull up on the Reachview 3 app.
Uploading: IMG_9610.PNG…

OK thanks for the pictures ! From what I see, your drone is inside a building during the test ? Have you tried with all the equipments outside, in a nice open-sky area ?
Cause I would guess the DJI is not even trying to do RTK positioning because of the very poor signal it must have in here.
Also, small tip, in this local NTRIP setup, there is no need to plug the LoRa radio in the Reach RS2.

Thanks Peter for these additional details.
The WiFi signal from the base could be low. What is the distance between the RS2 and the DJI controller in that outside test ?
8’-10’ away
I’m running out of ideas ![]()
Let’s hope for a tip from the Emlid team or another user !
Peter, typically, guys have issues with Local NTRIP because they either don’t have all devices on the same network, or they have the ip address incorrectly entered into the rover (drone) The IP can change each time you set up.
I don’t see an image of your NTRIP login page for the M3E above. Maybe double check these items.
1 Like
Great suggestion. I’ll double check that
I’ve seen several posts where people are having a difficult time getting fix when they have GLONASS enabled. Try turning off that constellation on the base. Or beyond that turn off all constellations except GPS and see if you can get a fix, then add in the constellations one at a time.
If a rover is receiving corrections at all, even if the quality is low, it should resolve to FLOAT. If no corrections are received, then the rover (drone) will remain in SINGLE as it is in Peter’s case.
1 Like
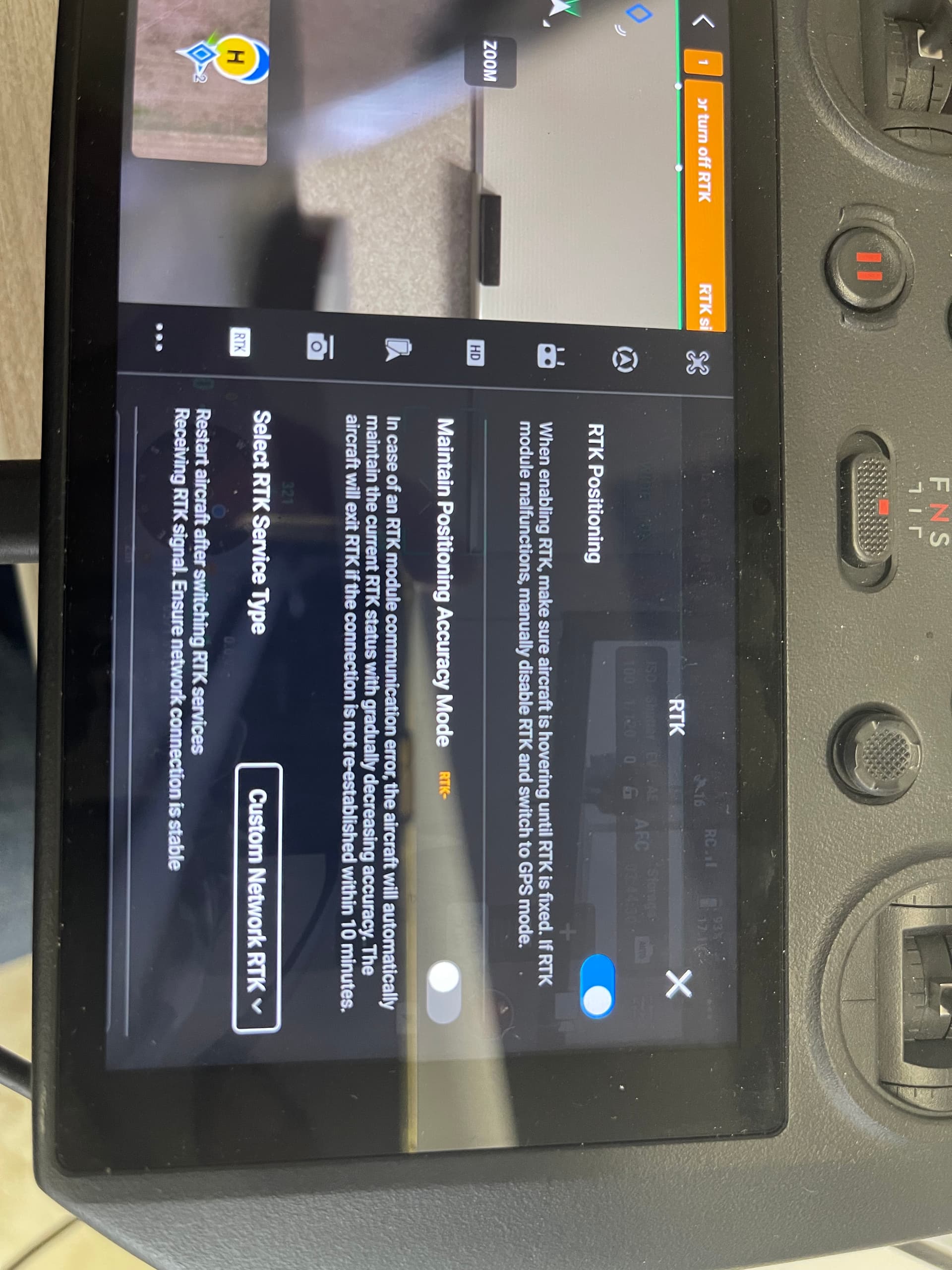
Are you planning is to have your base and rover to simply log RINEX data independently for use in PPK? If not then, you need to configure the rover (via ReachView 3) to receive corrections. Looks like it’s turned off.
Do not have a rover. Using one RS2+ as a base on a known point and a DJI Mavic 3 enterprise drone as the river for RTK corrections.
The issue I have is on the dji controller I don’t seem to be able to get a fix through RTK from the base.