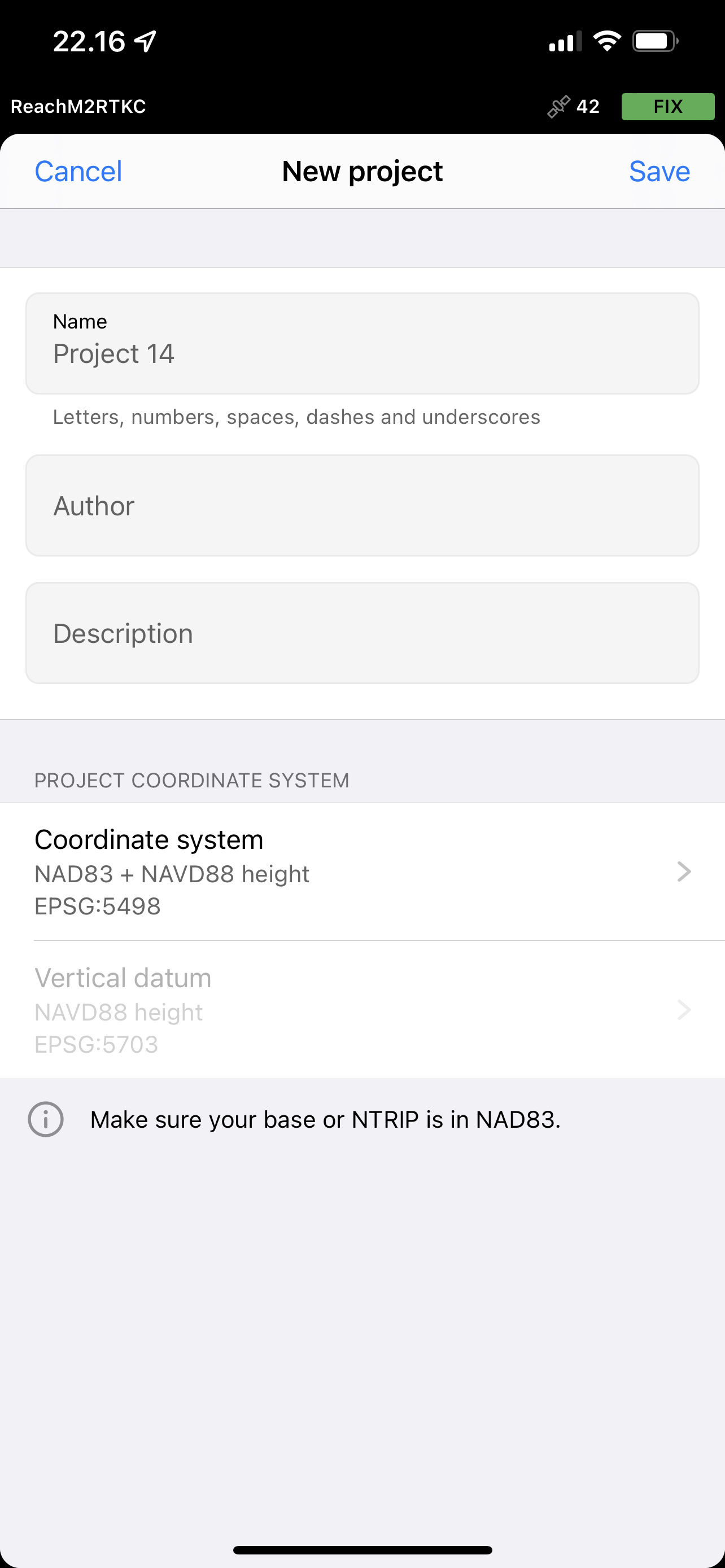
Your output system is defined by your base coordinates. So in this case it is NAD83.
As for the system in RV3, this seems appropriate?