The first one is that I can get data in Mission Planner to show the bars, I’m getting RTCM and CAN also. I have opened TCP, Port 9001. can I use this data to feed the GPS HERE3 which is connected to CAN to get correction data to PIXHAWK.
The second one is this:
We would like to also use RTK to get precision landings.
So the idea is to inject the stream from the RS2 into mission planner (or QGroundControl) and use the HERE3 for RTK on the rover. The reason being is I just do not want add weight to the system by introducing one more receiver M2 .
we only want to use the RTK for landing, that should not be a problem.
Is this possible and if yes, how to setup this combination?
I’ve tried almost everything, but I cannot get is to work. Maybe it’s just impossible or maybe I do something wrong.
You should be able to inject the correction messages into telemetry which can be sent to the drone. There, your GPS unit should take the corrections up. I’ve found a manual for HERE 3, which explains how to do that. Have you tried following the instructions from this manual?
Can HERE 3 work with RTCM3 correction messages? I couldn’t find this info on the websites. If it supports this format, then your setup should work.
The one mentioned in the manual is for a UBLOX i tried getting the data through TCP from reach rs2 but i don’t know whether its injecting into the controller or not ,because in the screen there’s no mentioning of the 3D fix or float…
How did you configure HERE 3 to receive the corrections?
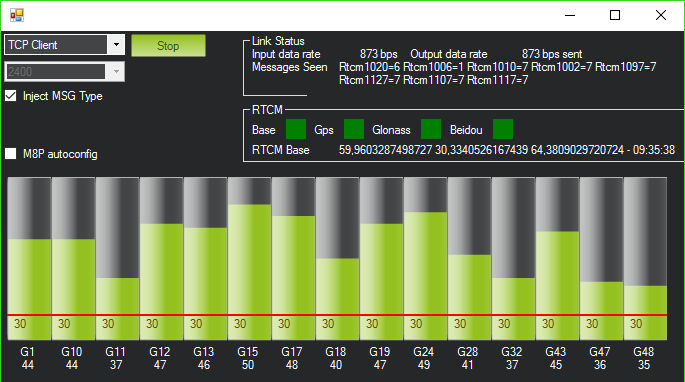
If the corrections from RS2 are coming in Mission Planner, you’ll see the green bars on the RTK/GPS Inject page. Something similar to the screenshot below.
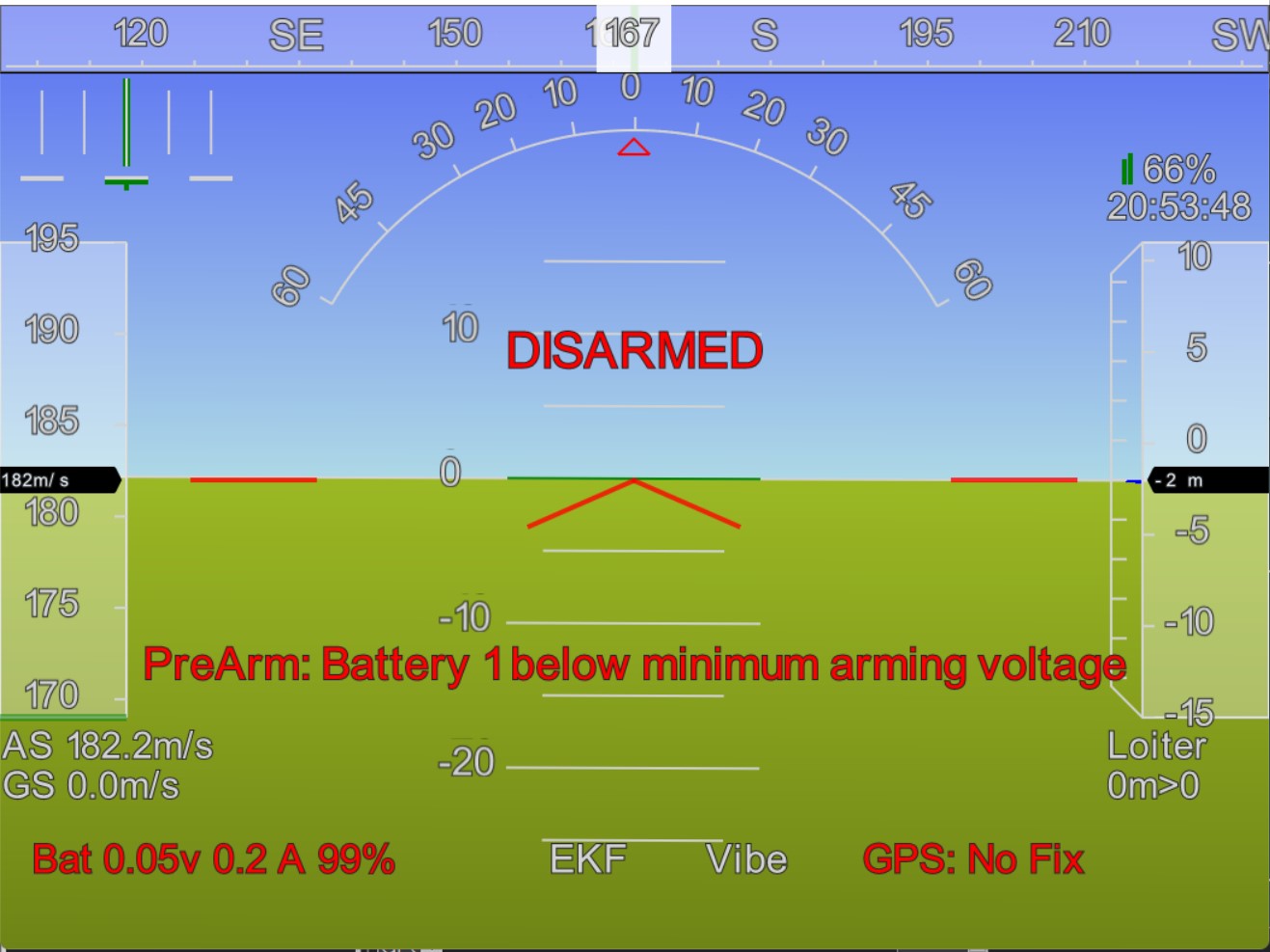
I see that the status is GPS:No Fix. It means that the GPS works and ArduPilot see the coming data, but it just doesn’t have a good quality signal. Are you testing this outdoors? GNSS receivers need to be provided with a clear sky view with no obstacles that could block the view like buildings or trees.
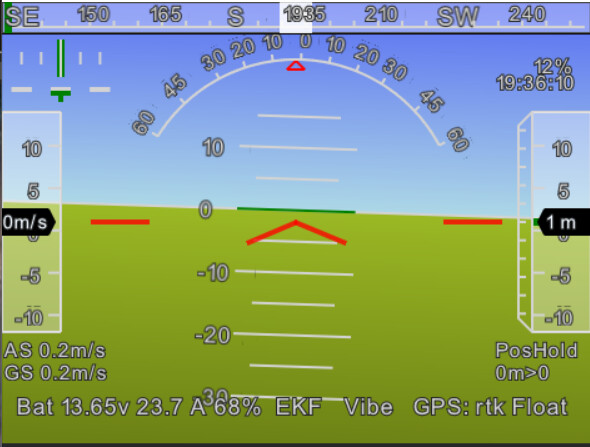
FLOAT status means that the rover receives corrections from the base but cannot resolve all ambiguities. Usually, in such cases, the precision is usually at the submeter level. In any way, we can conclude that the corrections from RS2 are received by HERE3. But the rover can’t calculate FIX position.
Usually, the issue is in the incorrect placement of the rover on the drone. For example, the antenna isn’t provided with a sky view 30 degrees above the horizon. Or the drone’s electronics produce a lot of RF noise worsening the quality of the observed signal. It’s better to check up with the receiver’s manufacturer for recommendations on the best placement. Regarding RS2, you need to ensure that the base is located according to best practices you can check out in our guide.
It’s also possible that the corrections stream link isn’t stable. For instance, sometimes there is a delay in the messages sent. So it’s better to check how your telemetry works and if they are providing reliable data transmission.
I’m not sure I totally understand what you mean, but the rover can calculate the FIX solution by using the correction messages from the base. At the same time, both base and rover need to have good quality GNSS signal received. You can ensure this by placing the receivers in the appropriate environmental conditions. The stability of the RTK link also provides you with the ability to achieve FIX.