



Hi everyone,
Software version v2.24.2
I have plug my reach RS+ using the USB cable to my computer which is running under ubuntu 18.04.
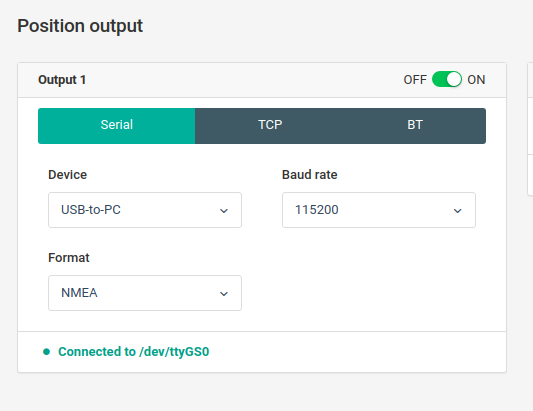
I have configured the output number 1 using reachview app.
I can see on my linux that there is a new device :
[ 3370.197311] cdc_acm 1-2:1.2: ttyACM0: USB ACM device
but when I try to see the incoming data using cat or minicom I get nothing
sudo cat /dev/ttyACM0
and
sudo minicom -D /dev/ttyACM0 -b 115200
I also tried the walkthrough https://community.emlid.com/t/reach-usb-to-pc/12045/2 with serial tester but I get nothing.
I have 2 reach RS+ and I have the same behaviour. I want to do a rover/base system and collect data with my linux.
System report:
Simple system report
app version: 2.24.2-r0
'wifi_status, interface: wlan0':
- wifi_mode: infrastructure
- ip: 192.168.0.198
is_added: true
is_connected: true
is_visible: false
base mode:
base coordinates:
accumulation: 2.0
antenna offset:
east: '0'
north: '0'
up: '0'
coordinates:
- 0
- 0
- 0
format: llh
mode: single-and-hold
output:
baud_rate: 38400
device: UART
enabled: false
io_type: serial
rtcm3 messages:
'1002':
enabled: true
frequency: 1.0
'1006':
enabled: true
frequency: 0.10000000000000001
'1010':
enabled: true
frequency: 1.0
'1097':
enabled: false
frequency: 1.0
'1107':
enabled: false
frequency: 1.0
'1117':
enabled: false
frequency: 1.0
'1127':
enabled: false
frequency: 1.0
bluetooth:
discoverable: false
enabled: false
pin: '***'
constraints:
lora:
frequency:
- - 863000
- 870000
correction input:
input2:
air_rate: 9.1099999999999994
enabled: true
frequency: 868000
io_type: lora
output_power: 20.0
send_position_to_base: false
device:
night_mode: false
power_on_bottom_connector: false
privacy_policy_accepted: true
usage_analysis_accepted: false
logging:
base:
format: RTCM3
started: true
correction:
format: RTCM3
started: true
debug: false
interval: 24
overwrite: true
raw:
format: UBX
started: true
solution:
format: LLH
started: true
lora:
air rate: 9.1099999999999994
frequency: 868000
output power: 20.0
position output:
output1:
baud_rate: 57600
device: USB-to-PC
enabled: true
format: NMEA
io_type: serial
output2:
baud_rate: 38400
device: UART
enabled: false
format: ERB
io_type: serial
rtk settings:
elevation mask angle: 15
glonass ar mode: 'on'
gps ar mode: fix-and-hold
max horizontal acceleration: 1.0
max vertical acceleration: 1.0
positioning mode: kinematic
positioning systems:
compass: false
galileo: true
glonass: true
gps: true
qzss: true
sbas: true
snr mask: 35
update rate: 5
Best regards