



This model is not made for work, but for I bought it two months ago with the idea of using it to take about 6000 points in my own vineyard.
After two months of trying anyway i couldn’t reach a fix real bottom up after about 30 and trying i have no more than 600 points taken.
every day i go with the idea to start and finish my scheme but many days i go without getting a fix at all i regularly reboot update i changed firmware reset…
My plot of land is in the middle of the field but the chance of getting a fix is almost zero.
I am asking for clarification from the manufacturer whether this device is really capable of doing any work or not.
Nobody has time to waste.
I ask everyone who owns this device to share their impressions of working with it, whether it really works or not.
Please described your measurement methodology.
How are you measuring your point locations ? Is there another reference base receiver onsite ? If so, are you using radio for RTK, local ntrip or RTN ?
The RS+ is a single frequency receiver and is not as robust as the RS2 or M2. Single frequency receivers should be used in open sky conditions only with no multipath. You describe the area as a vineyard; if you have a local base and good communication (radio RTK, internet access, RTN), then you should have no problem getting accurate “fixes” with a single frequency receiver. There is a local vineyard nearby (about 20ac of muscadines) , it would seem at this site that the rod receiver height would need to be 2.0m to locate the ends and points along the grape vines. The vines there are about 6ft tall.
What is your purpose for locating “6000 points in my own vineyard” ?
Even if you didn’t have RTK availability, you can still PP (post process) your baseline measurements with the local base (if you have one) or to a local CORS (if it’s <20km). What is your accuracy budget of the located points ? Do you need cm, dm or meter accuracy ? If you have a local base, what are the baseline lengths of your points ? This will have an effect on occupation times on point if PP. If post processing the local baselines (base receiver onsite to your rover receiver) are less than 3km, then I would advise a minimum of 3-5 minutes of observation per point for any kind of cm accuracy. If you’re PP using a CORS >10km from your site, then occupation times should be a minimum of 15 min for single frequency receivers.
If your using just a single RS+ receiver (no RTK, no RTN, no base, no PP), then the best accuracy you’ll obtain is a meter at best.
How old is the receiver ? Is the unit firmware and Reach app software up to date ?
Looking forward to your reply.
Hi
I use internet access point.
I pay 1 year rtk corrections.
I pay survay plan.
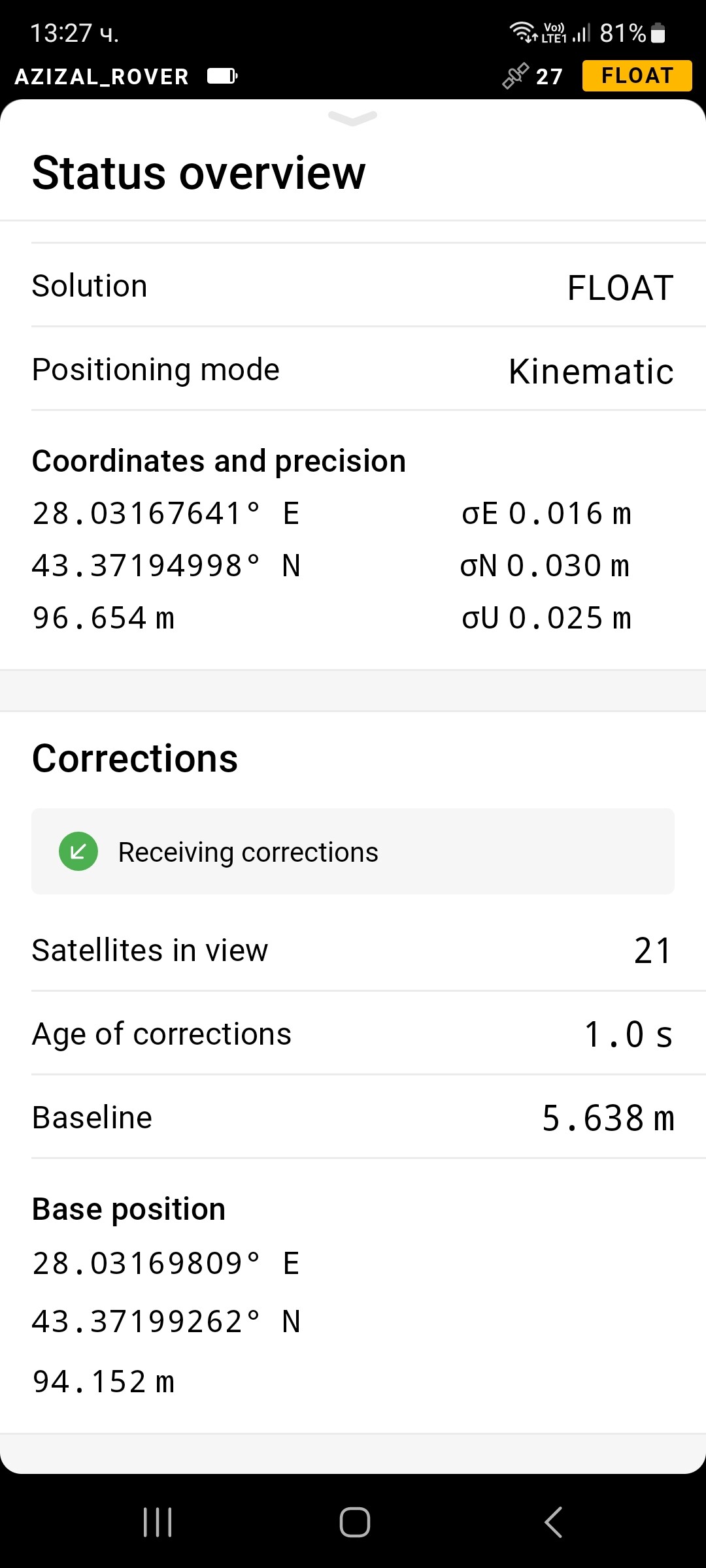
But fix is a dream.
Today i win.
I have fix for around 10 min.
But this was all.
I’d contact Emlid via email. They are very helpful !
How far away is the base station?
10, 5, 20 m
It is near
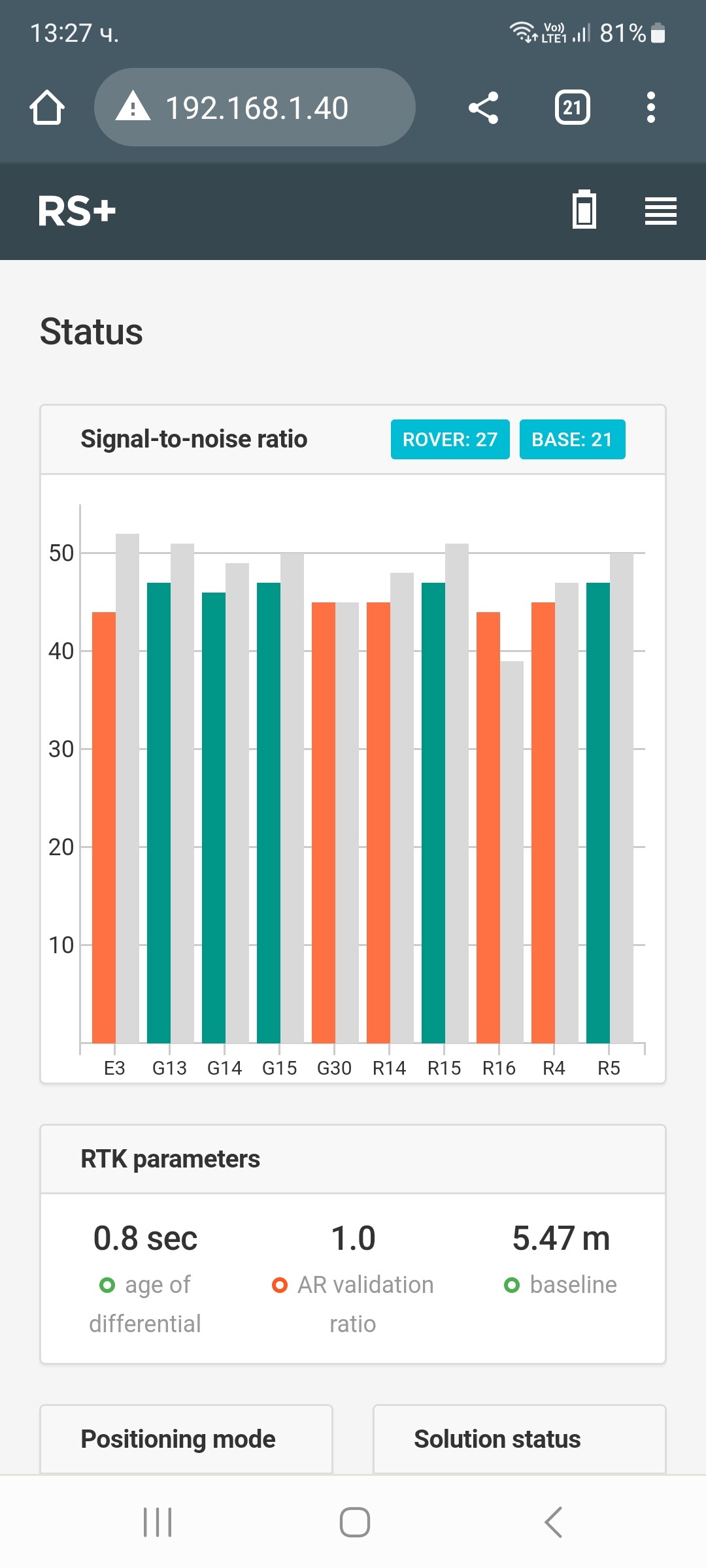
Base have 20 sat
Roverbhave 20-23 sat
Hmm, is the base transmitting all 4 constellations?
Can you share pictures of your setup and environment?

Simple system report
app version: 29.2-r0
current_network:
ip: 192.168.1.40
security: wpa-psk
ssid: AZIZAL24
enabled: true
mode: client
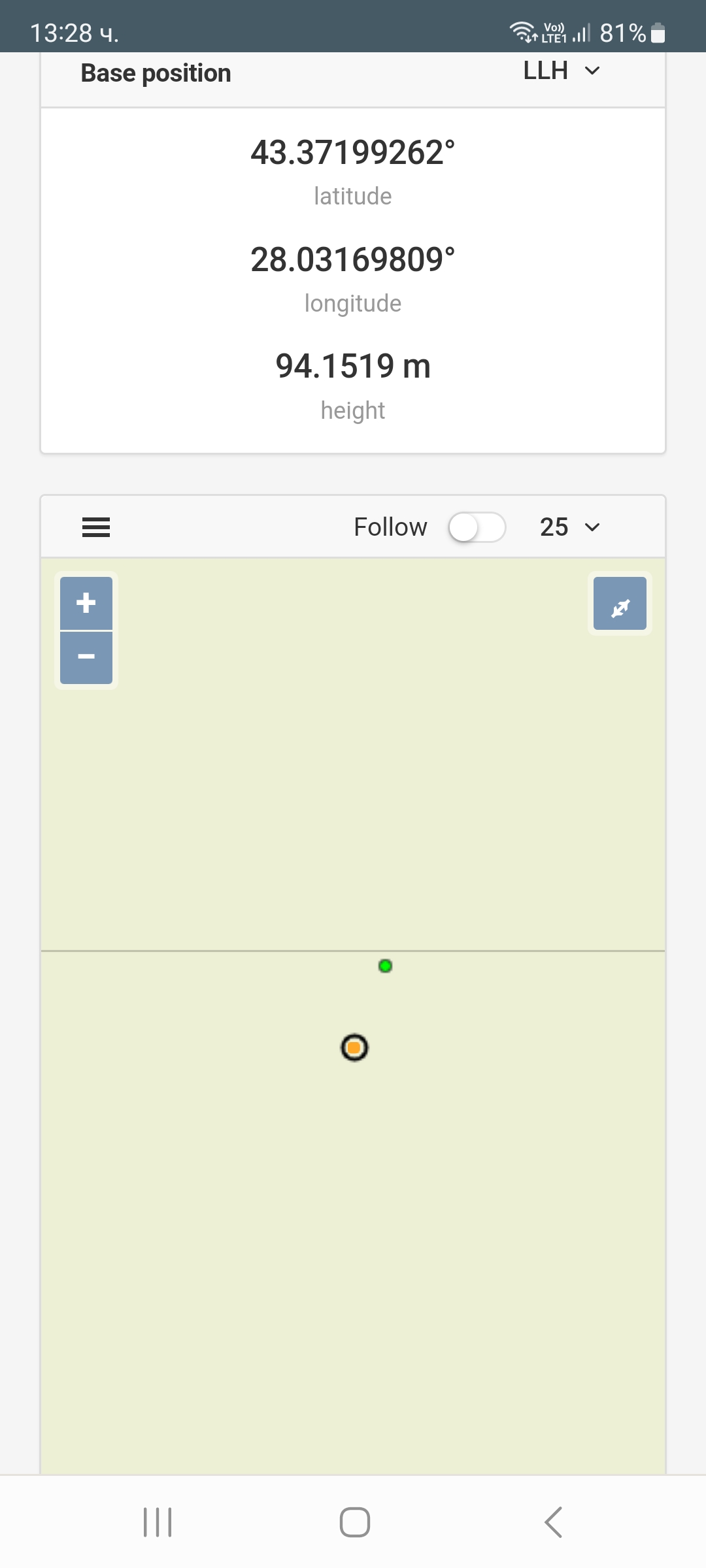
base_mode:
base_coordinates:
accumulation: 120
mode: single-and-hold
output:
io_type: 'off'
settings:
lora:
air_rate: 9.11
frequency: 868000
output_power: 20
ntripcaster:
mount_point: REACH
password: '***'
port: 2101
username: reach
ntripsvr:
address: ''
mount_point: ''
password: '***'
port: -1
serial:
baud_rate: 38400
device: ttyEXTS0
tcpcli:
address: localhost
port: 9001
tcpsvr:
port: 9000
rtcm3_messages:
message_1002:
enabled: true
frequency: 1
message_1006:
enabled: true
frequency: 0.1
message_1010:
enabled: true
frequency: 0.5
message_1097:
enabled: true
frequency: 0.5
message_1107:
enabled: true
frequency: 0.5
message_1117:
enabled: true
frequency: 1
message_1127:
enabled: true
frequency: 0.5
bluetooth:
enabled: true
pairing:
discoverable: true
no_input_no_output: true
pin: '***'
correction_input:
base_corrections:
io_type: ntripcli
settings:
bluetooth:
send_position_to_base: false
lora:
air_rate: 9.11
frequency: 868000
output_power: 20
send_position_to_base: false
ntripcli:
address: 217.174.151.230
mount_point: VRSMSM
password: '***'
port: 2111
send_position_to_base: true
username: azizal
serial:
baud_rate: 38400
device: ttyEXTS0
send_position_to_base: true
tcpcli:
address: localhost
port: 10001
send_position_to_base: true
tcpsvr:
port: 10000
send_position_to_base: true
device:
power_on_bottom_connector: false
privacy_policy_accepted: true
role: null
rv3_banner_shown: true
usage_analysis_accepted: true
logging:
logs:
base:
autostart: true
format: RTCM3
started: true
raw:
autostart: true
format: RINEX
rinex_options:
logging_interval: 0
marker_name: null
pole_height: null
preset: custom
satellite_systems:
beidou: true
galileo: true
glonass: true
gps: true
qzss: true
sbas: true
time_adjustments_enabled: false
started: true
version: '3.03'
solution:
autostart: true
format: LLH
started: true
settings:
debug: false
interval: 24
overwrite: true
simultaneous_logging: false
position_output:
output1:
io_type: bluetooth
nmea_settings:
bluetooth:
gga:
enabled: true
update_rate: 1
gsa:
enabled: true
update_rate: 1
gst:
enabled: true
update_rate: 1
gsv:
enabled: true
update_rate: 1
main_talker_id: gn
rmc:
enabled: true
update_rate: 1
vtg:
enabled: true
update_rate: 1
zda:
enabled: true
update_rate: 1
serial:
gga:
enabled: true
update_rate: 1
gsa:
enabled: true
update_rate: 1
gst:
enabled: true
update_rate: 1
gsv:
enabled: true
update_rate: 1
main_talker_id: gn
rmc:
enabled: true
update_rate: 1
vtg:
enabled: true
update_rate: 1
zda:
enabled: true
update_rate: 1
tcpcli:
gga:
enabled: true
update_rate: 1
gsa:
enabled: true
update_rate: 1
gst:
enabled: true
update_rate: 1
gsv:
enabled: true
update_rate: 1
main_talker_id: gn
rmc:
enabled: true
update_rate: 1
vtg:
enabled: true
update_rate: 1
zda:
enabled: true
update_rate: 1
tcpsvr:
gga:
enabled: true
update_rate: 1
gsa:
enabled: true
update_rate: 1
gst:
enabled: true
update_rate: 1
gsv:
enabled: true
update_rate: 1
main_talker_id: gn
rmc:
enabled: true
update_rate: 1
vtg:
enabled: true
update_rate: 1
zda:
enabled: true
update_rate: 1
settings:
bluetooth:
format: NMEA
serial:
baud_rate: 38400
device: ttyEXTS0
format: ERB
tcpcli:
address: localhost
format: ERB
port: 9000
tcpsvr:
format: LLH
port: 9001
output2:
io_type: 'off'
nmea_settings:
bluetooth:
gga:
enabled: true
update_rate: 1
gsa:
enabled: true
update_rate: 1
gst:
enabled: true
update_rate: 1
gsv:
enabled: true
update_rate: 1
main_talker_id: gn
rmc:
enabled: true
update_rate: 1
vtg:
enabled: true
update_rate: 1
zda:
enabled: true
update_rate: 1
serial:
gga:
enabled: true
update_rate: 1
gsa:
enabled: true
update_rate: 1
gst:
enabled: true
update_rate: 1
gsv:
enabled: true
update_rate: 1
main_talker_id: gn
rmc:
enabled: true
update_rate: 1
vtg:
enabled: true
update_rate: 1
zda:
enabled: true
update_rate: 1
tcpcli:
gga:
enabled: true
update_rate: 1
gsa:
enabled: true
update_rate: 1
gst:
enabled: true
update_rate: 1
gsv:
enabled: true
update_rate: 1
main_talker_id: gn
rmc:
enabled: true
update_rate: 1
vtg:
enabled: true
update_rate: 1
zda:
enabled: true
update_rate: 1
tcpsvr:
gga:
enabled: true
update_rate: 1
gsa:
enabled: true
update_rate: 1
gst:
enabled: true
update_rate: 1
gsv:
enabled: true
update_rate: 1
main_talker_id: gn
rmc:
enabled: true
update_rate: 1
vtg:
enabled: true
update_rate: 1
zda:
enabled: true
update_rate: 1
settings:
bluetooth:
format: NMEA
serial:
baud_rate: 38400
device: ttyEXTS0
format: ERB
tcpcli:
address: localhost
format: ERB
port: 9000
tcpsvr:
format: LLH
port: 9001
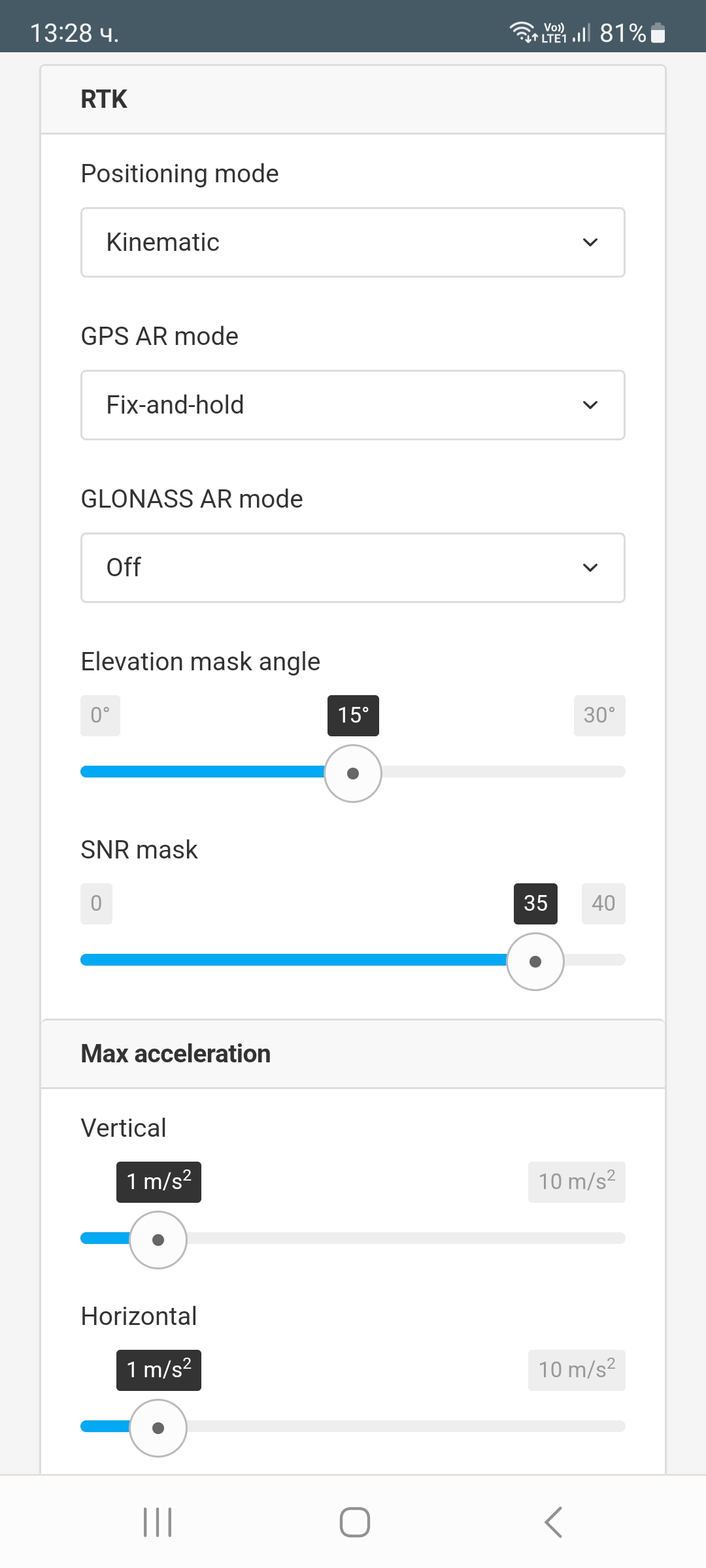
positioning_settings:
elevation_mask_angle: 15
glonass_ar_mode: false
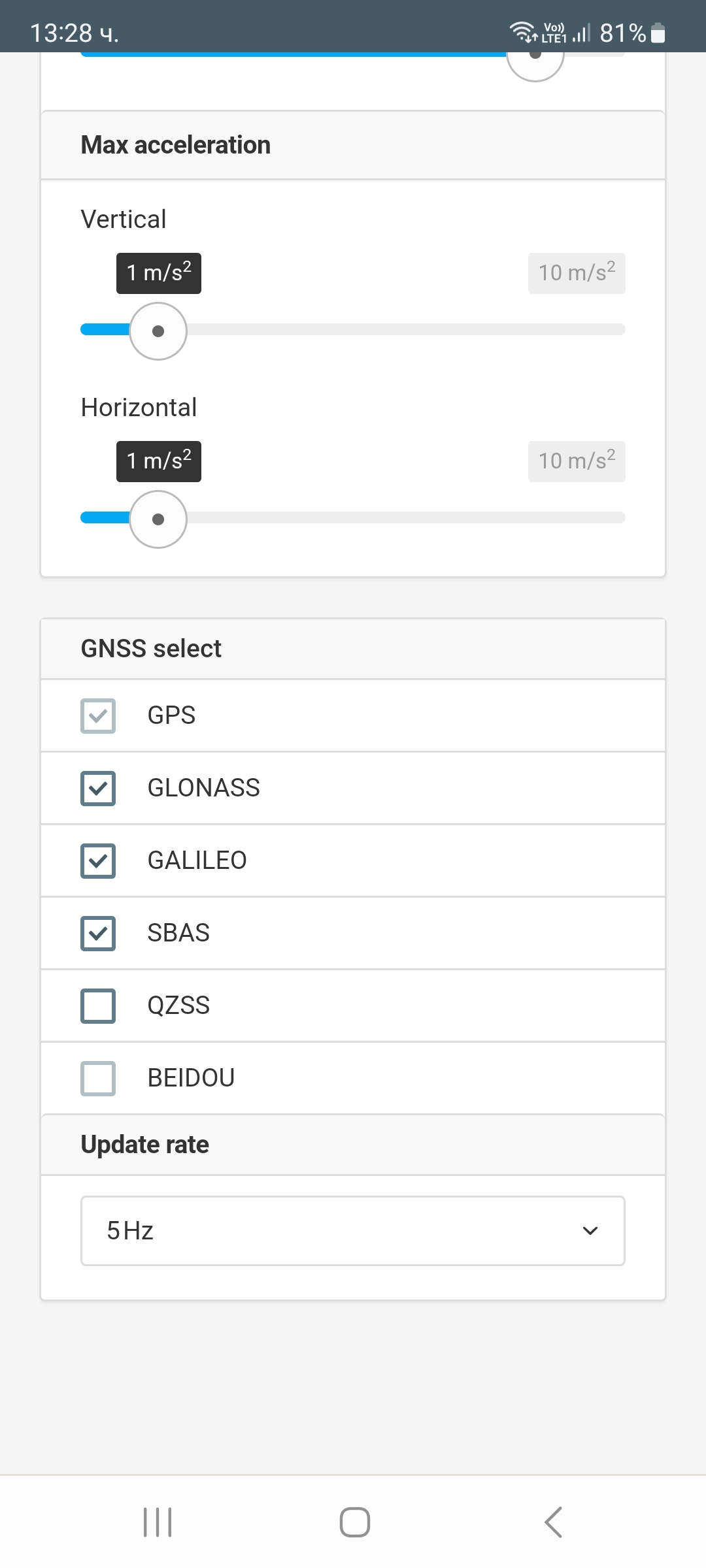
gnss_settings:
positioning_systems:
beidou: false
galileo: true
glonass: true
gps: true
qzss: true
sbas: true
update_rate: 5
gps_ar_mode: fix-and-hold
max_horizontal_acceleration: 1
max_vertical_acceleration: 1
positioning_mode: kinematic
snr_mask: 35
Hello Aziaza,
First remark set GLONASS AR mode to On and try.
Can you share pictures for a Base settings too?
i try AR on
same no result!!!
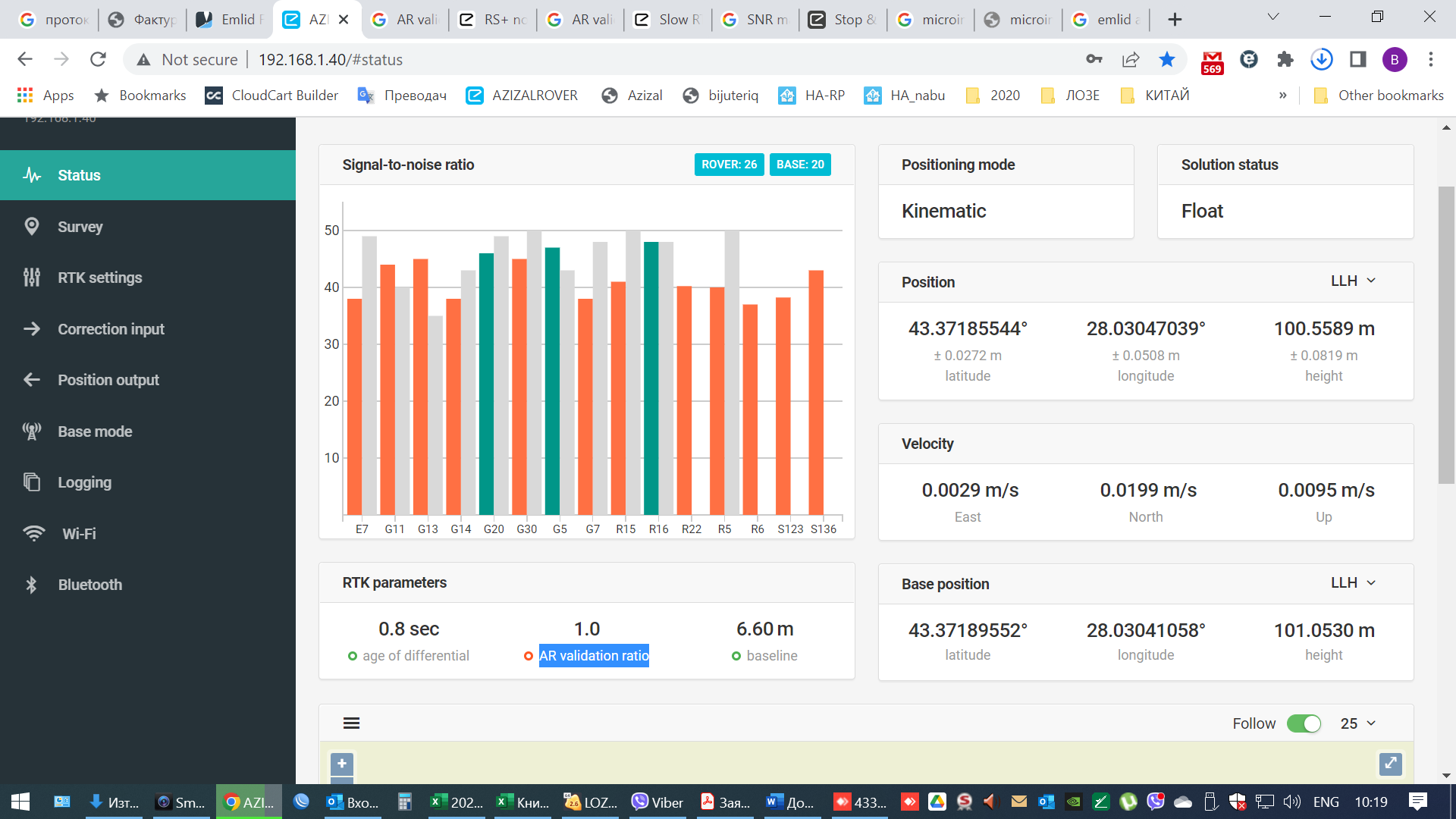
I see that your Base has a low signal and less satellites compared to that of the Rover so try to place a Base as shown here Placement | Reach RS/RS+
and set your Base and Rover as shown here Placement | Reach RS/RS+
Hi Valentin,
We’ll be sure to find a solution for you. As I see, my colleague Julia is already in touch with you over email regarding this issue. We’ll look into the logs you shared and write you back with our conclusions soon.
I waiting…
But no decision…
???
Hi Valentin,
We were in touch with you via email. I checked the logs you shared, and now I can get back to you with my thoughts.
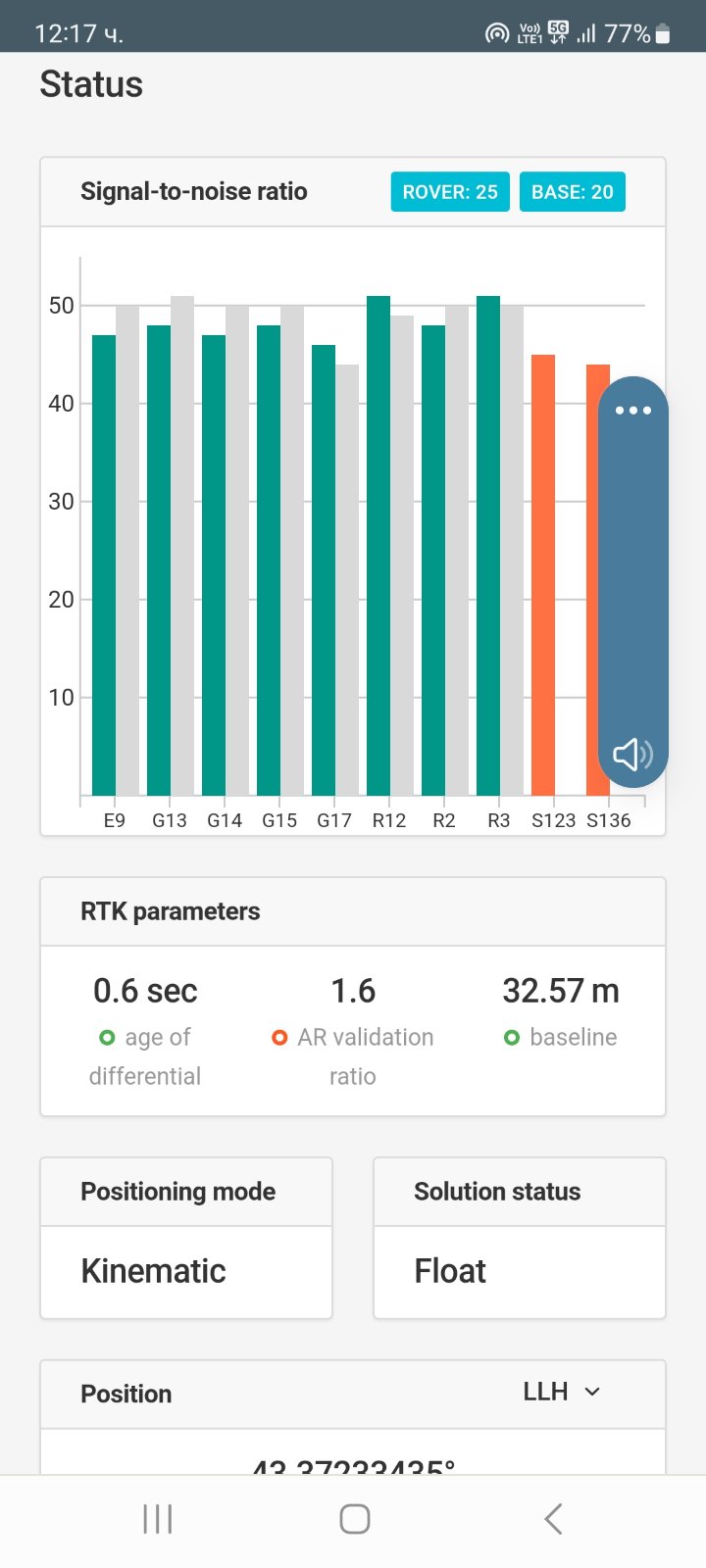
Here is the raw data log from your rover:
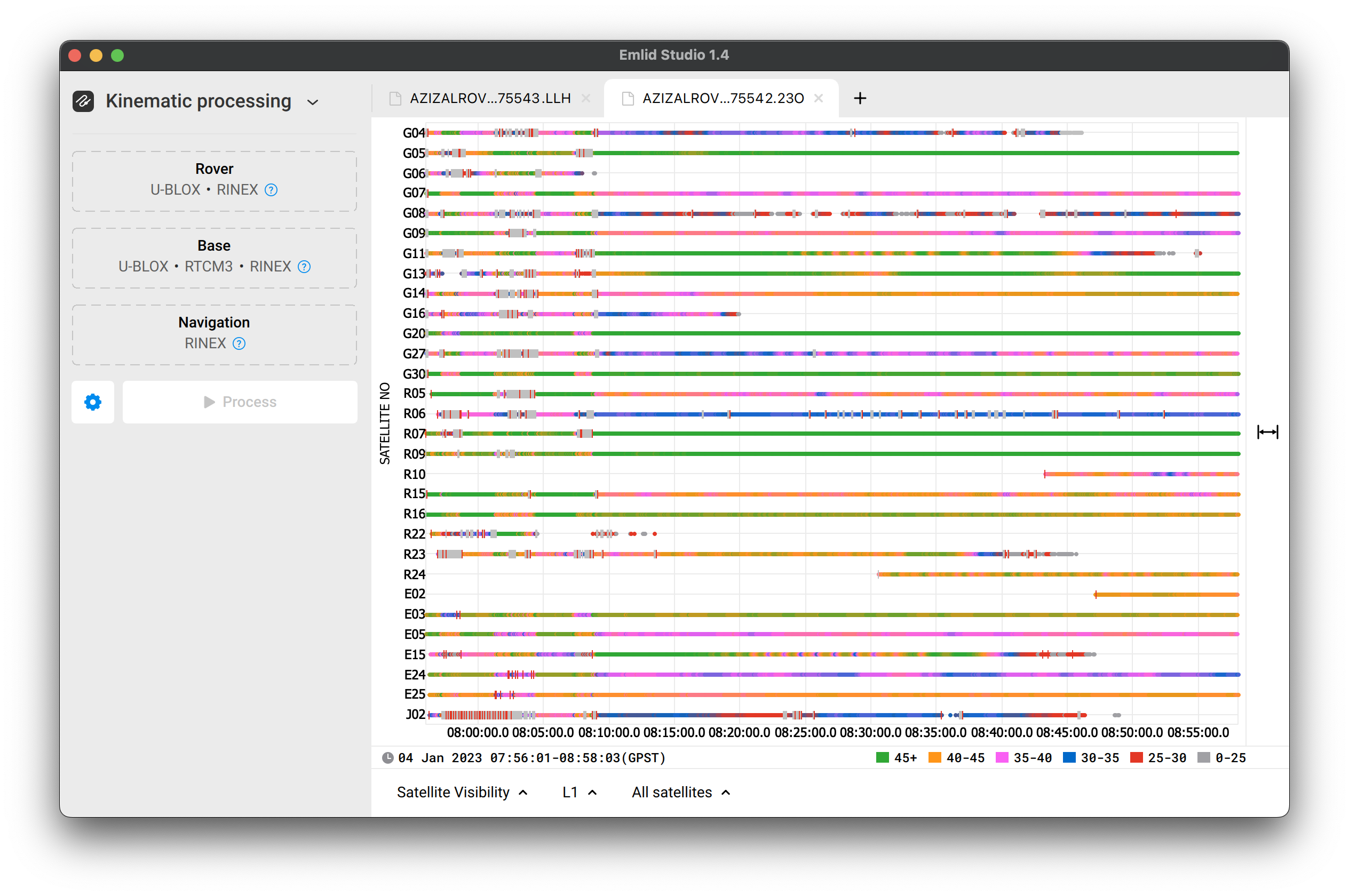
In the first 10–15 minutes, most of the signals are of poor quality. You can see many gray lines, which means the signals’ SNR is too low. The second part of the log is fine.
Here is the log with the corrections from the base. I think it’s ok:

And here is the position log from RTK:
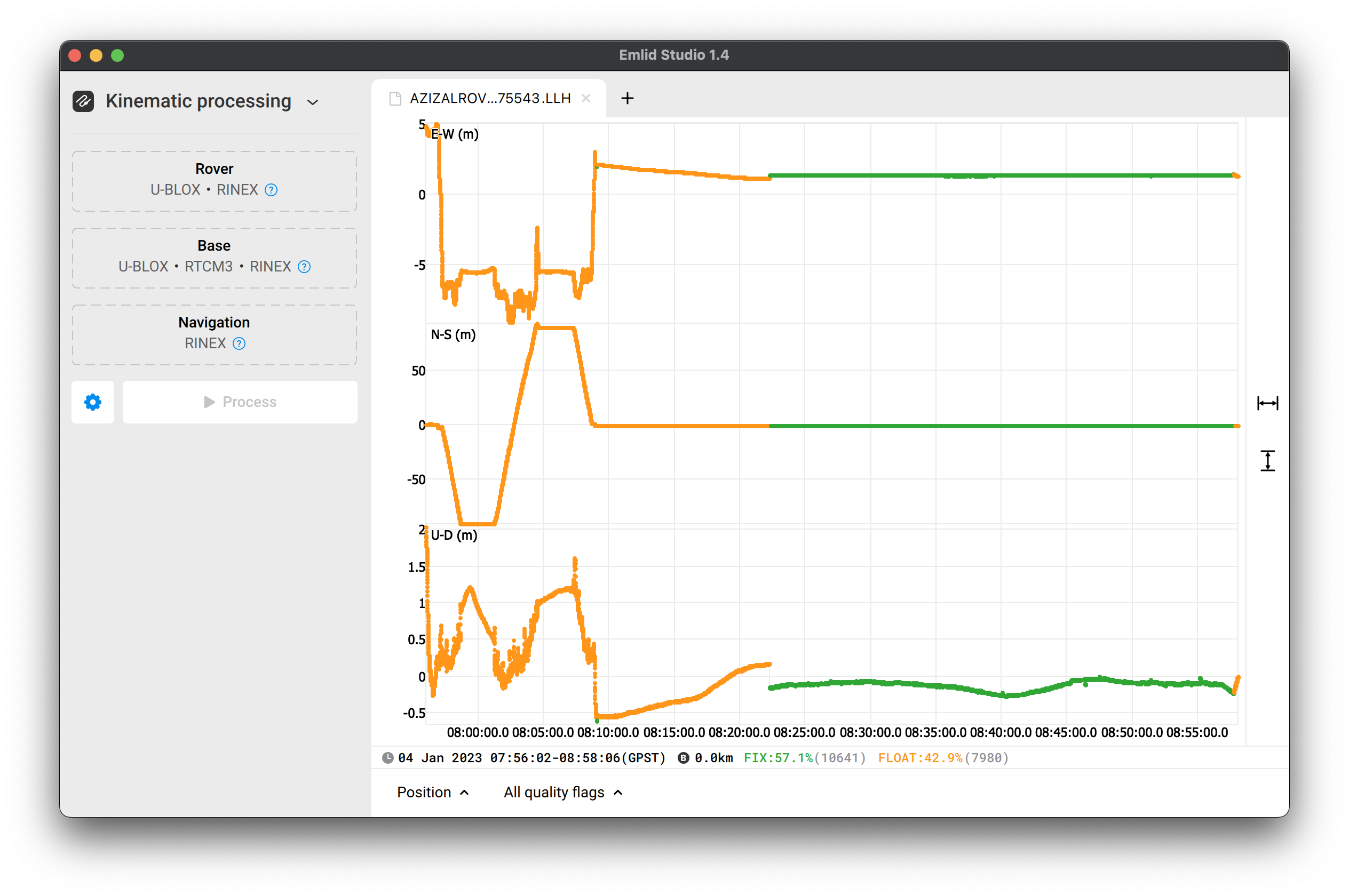
I’d separate it into 3 parts:
- First. It refers to the period of logs of poor quality.
- Second. The logs are ok, but previous observations still affect the calculations. Thus, the rover is still in Float.
- Third, when the logs are ok. The receiver resolved the ambiguities and got a Fix.
I think this first part of the rover’s log affected the further calculations process. Thus, achieving the fix took so long. So now comes the question: why the quality of the logs was so poor in the first 10–15 minutes?
Did the receiver have a good sky view without obstacles when you just turned it on? Were there any possible sources of interference nearby? Was the receiver placed on a survey poll or tripod?
Let’s do one more test. For it, place the Reach RS+ on a site with good satellite visibility on a poll or tripod. Make sure that nothing affects satellite signals reception and turn the unit on. Then, configure receiving corrections, and give it some time to calculate a fix. It may take about 1–2 minutes since Reach RS+ is single-band.
If the receiver is still in Float after that, you can also play with the settings a bit: change SNR and elevation mask. Please record RINEX, RTCM3, and LLH logs for this test as well and share them with me here or via support@emlid.com.
Hello
after quite a few tries i almost got a fix
but the joy was short lived.
i did a test…
as I decided to use the device on the beach. attaching photos…
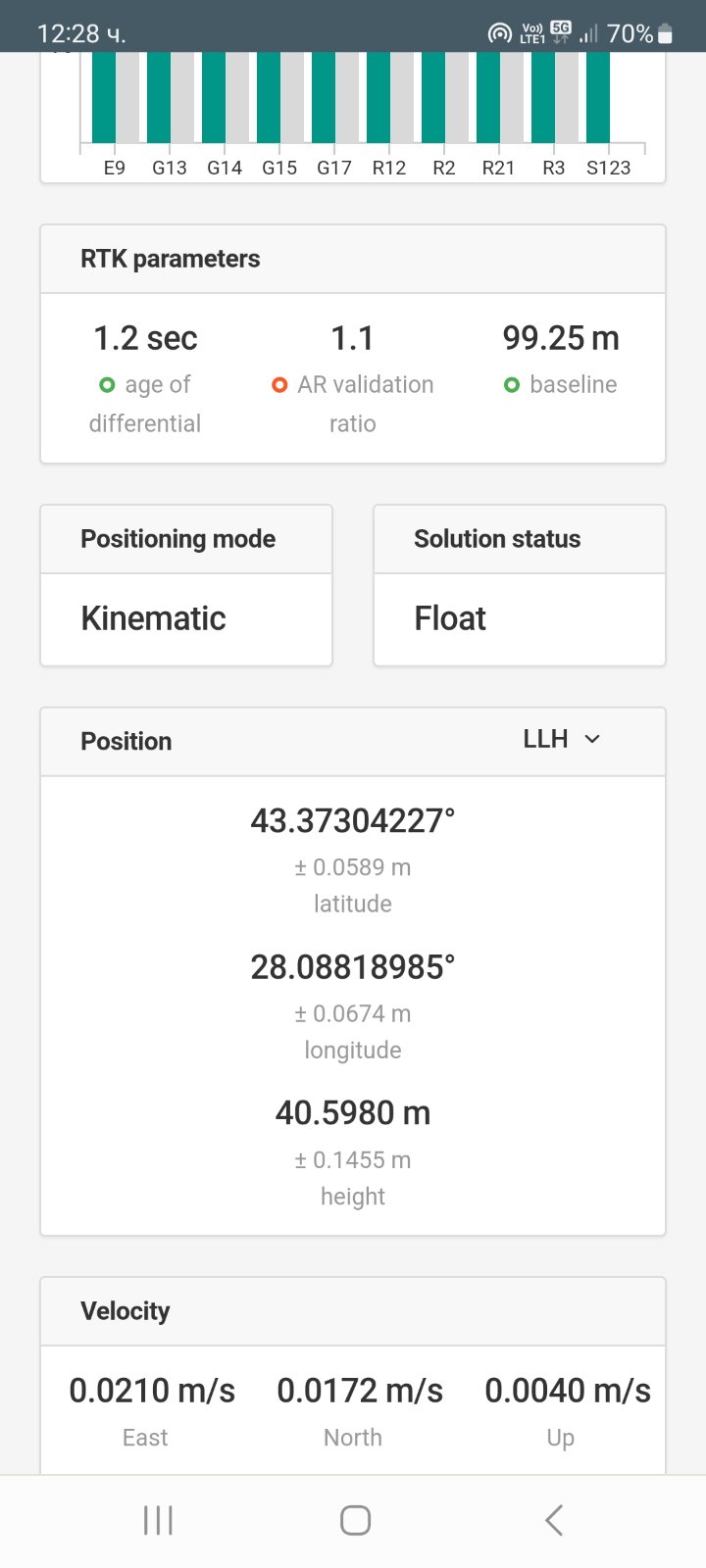
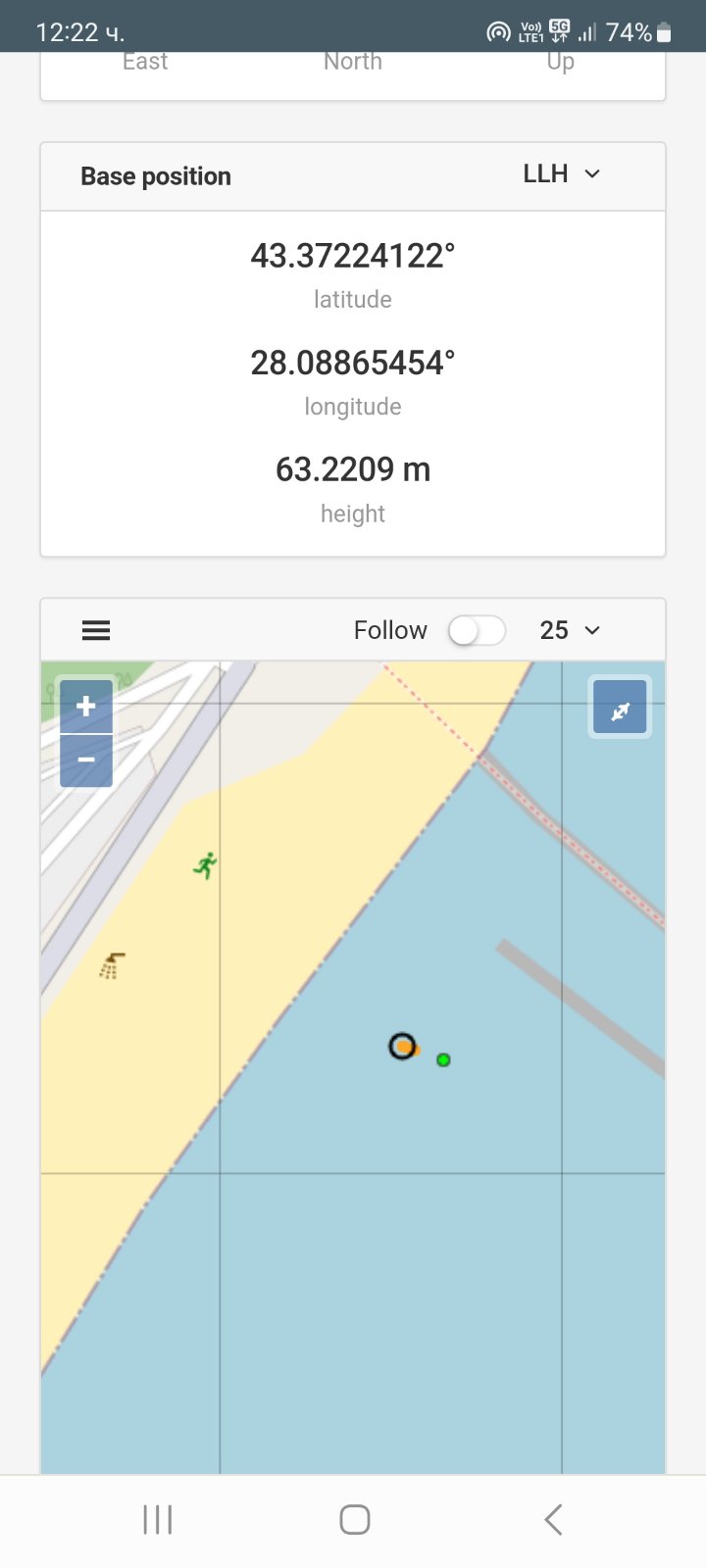

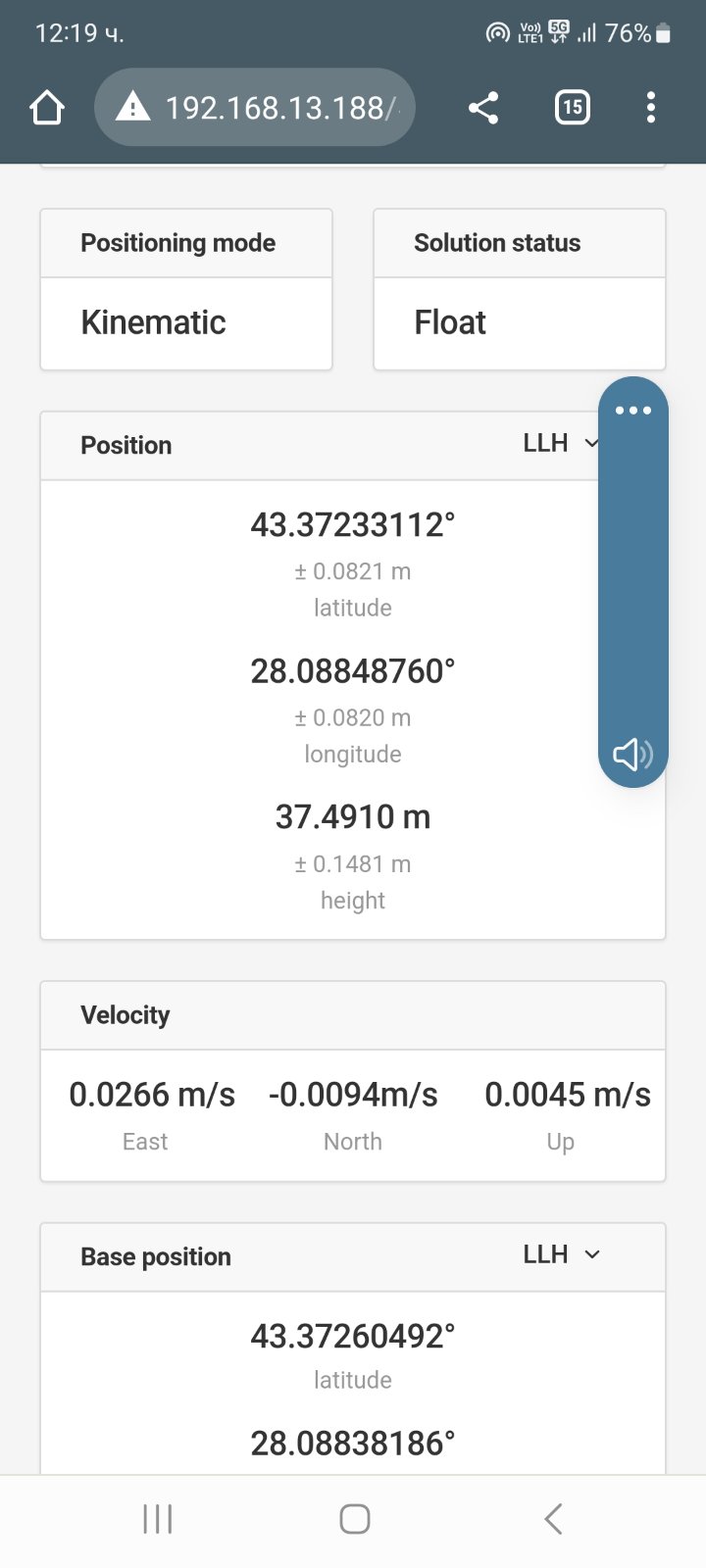
the data shown is strange in my opinion considering that the altitude is 0.
I also apply logs…
I’m very interested in what the answer will be this time.
is there any problem???
AZIZALROVER_base_20230115100813_RTCM3.zip (230.2 KB)
AZIZALROVER_raw_20230115100812_RINEX_3_03.zip (1.5 MB)
AZIZALROVER_solution_20230115100813_LLH.zip (83.4 KB)
and another log…
AZIZALROVER_base_20230115102152_RTCM3.zip (134.2 KB)
AZIZALROVER_raw_20230115102152_RINEX_3_03.zip (809.2 KB)
AZIZALROVER_solution_20230115102152_LLH.zip (48.5 KB)