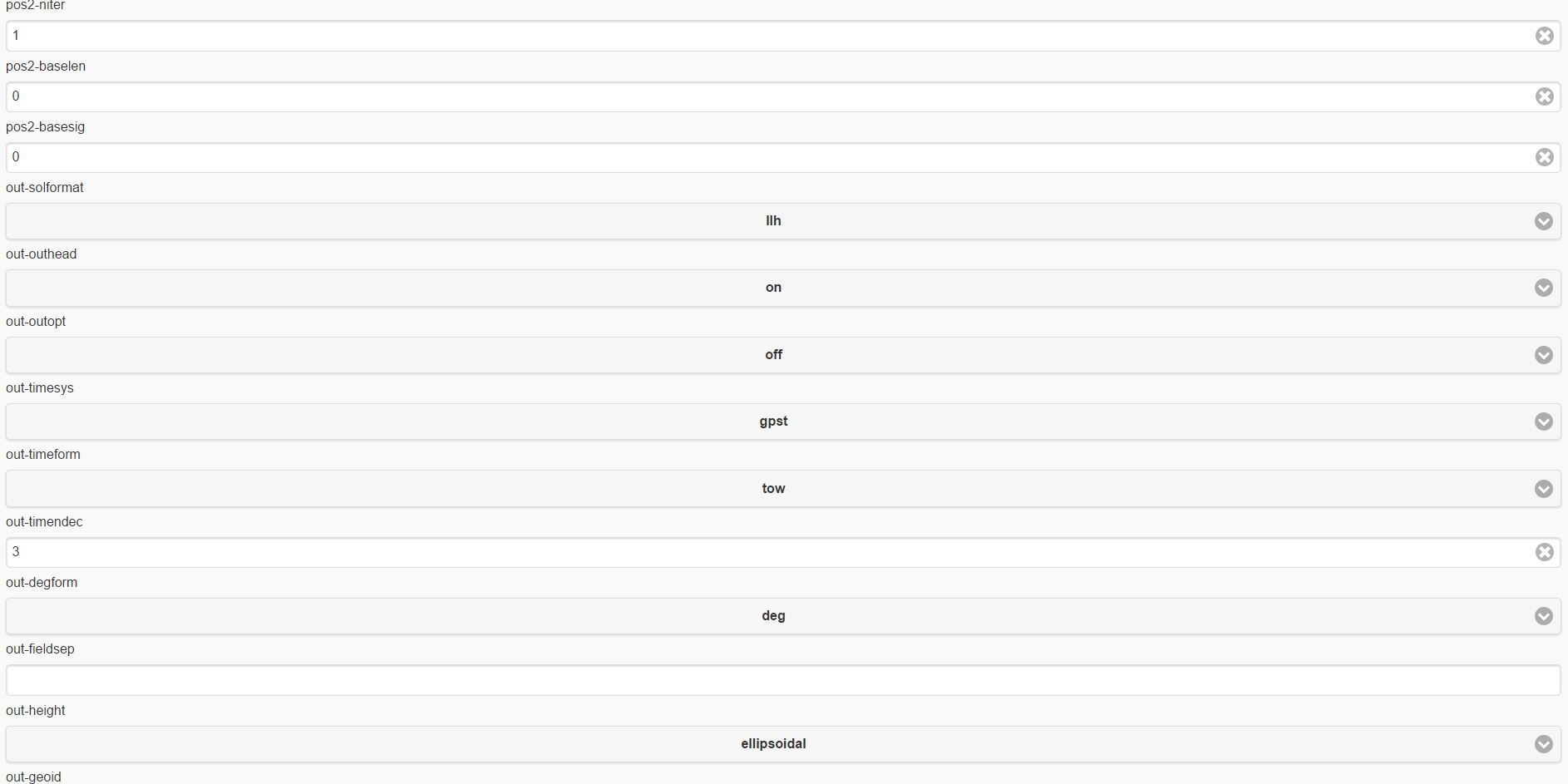
You set parameter “integer ambiguity validation threshold” to “1”, which means that almost any solution would be considered a fixed one. This is why you are seeing bad precision. Your sat signals do not look good. Are you testing outside or indoors?
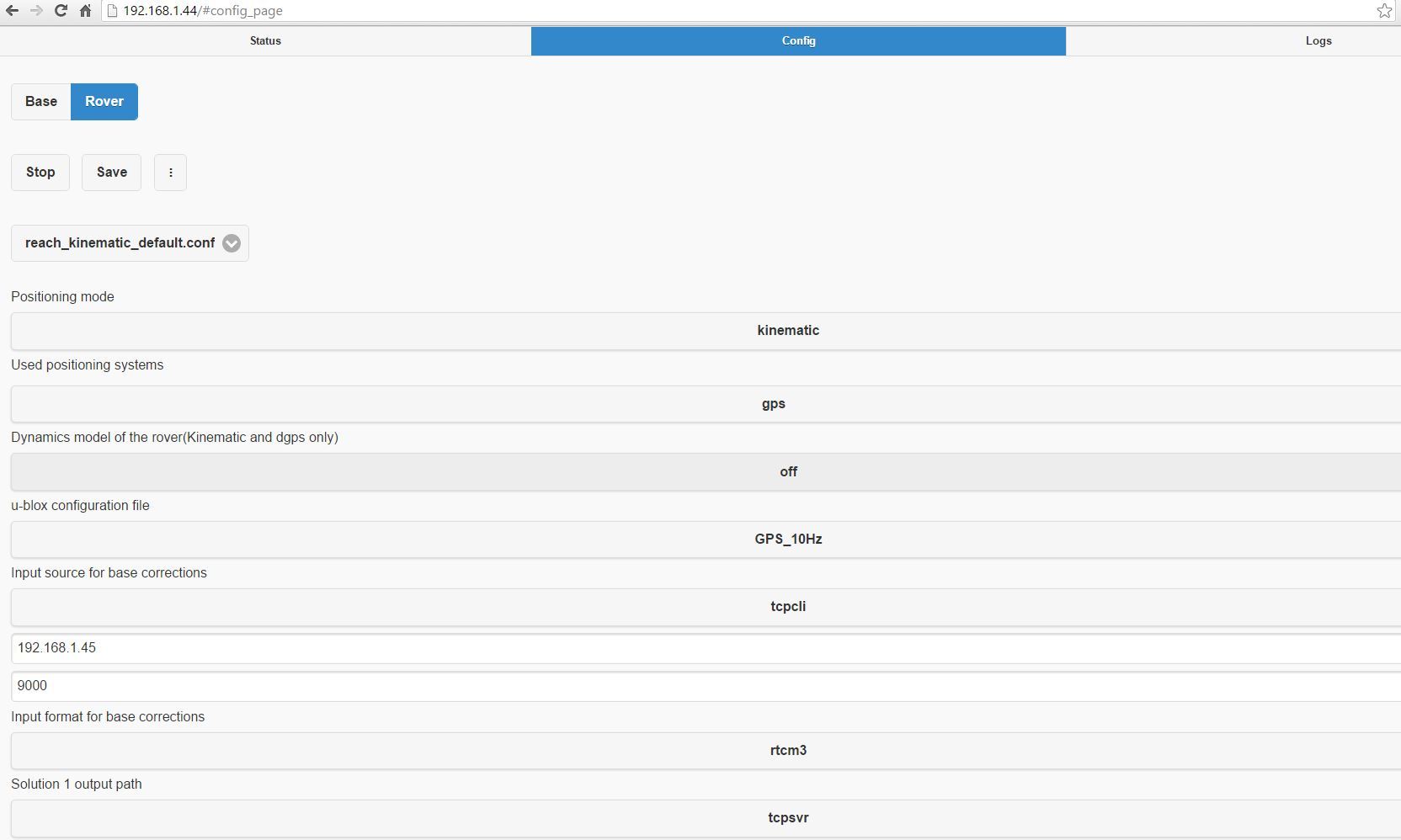
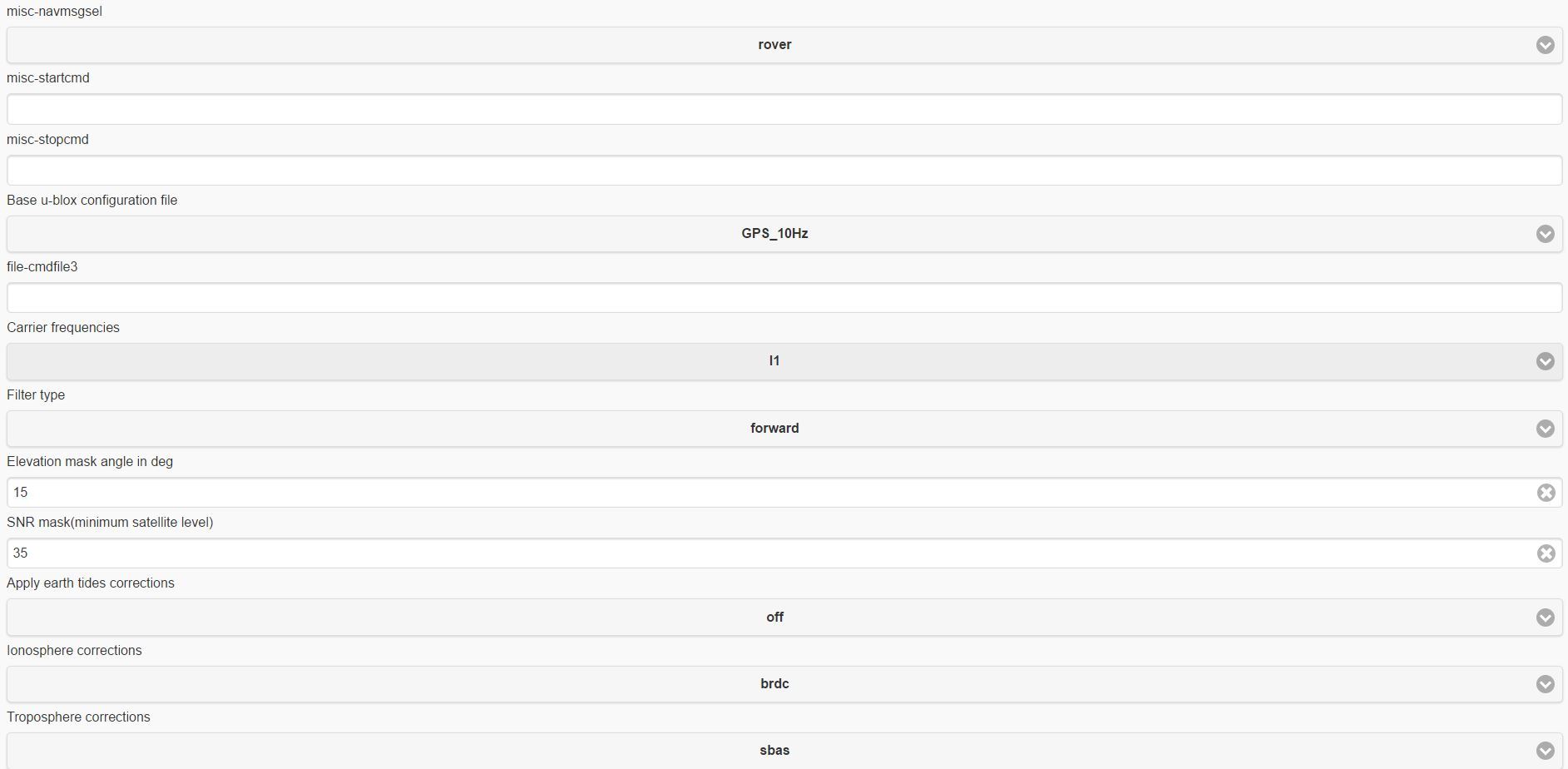
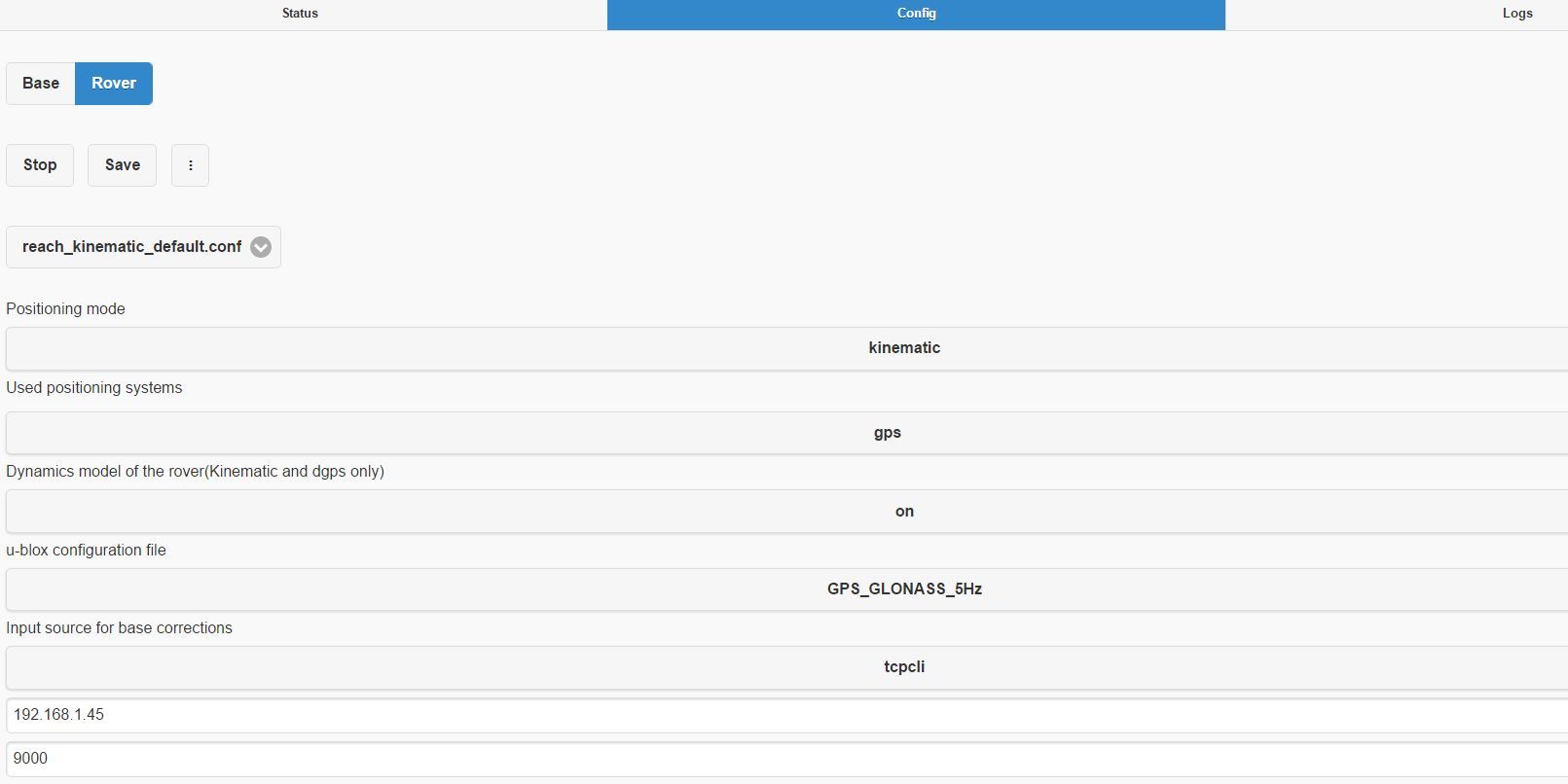
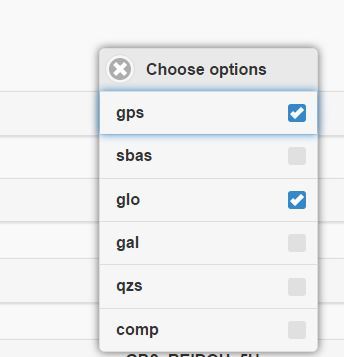
You also need to set configs to 5Hz GPS/Glonass to use Glonass and enable dynamic filter to improve performance. Switching from float to fix take a few minutes in good conditions. I can see buildings around, please make sure that sky view is not obstructed.
your settings seem to match what @igor.vereninov recommended and the rest look good to me. some possible problems:
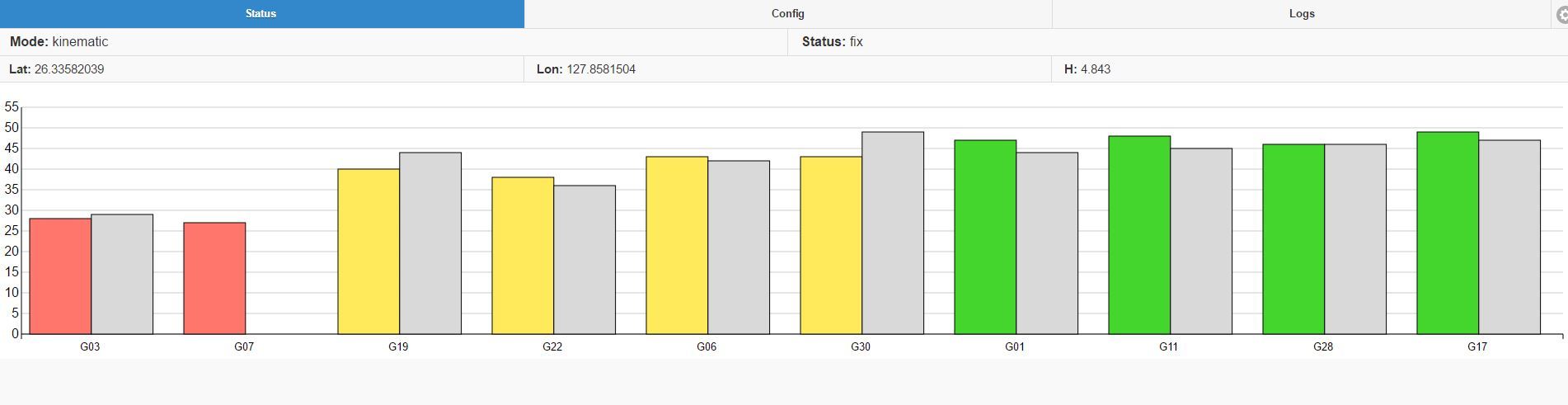
GPS satellites: not enough with SNR > 45dB (currently 4; where 5 or 6 is best)
the satellite geometry may not be ideal at the moment, and some time later it may be better for a fix
base and rover too close together? try increasing the distance between them to 10 or 20m or at least not on the same car roof
multipath reflections from the nearby building confusing Reach. Maybe move your setup away from the side and over toward the corner of the building where there are far less reflections
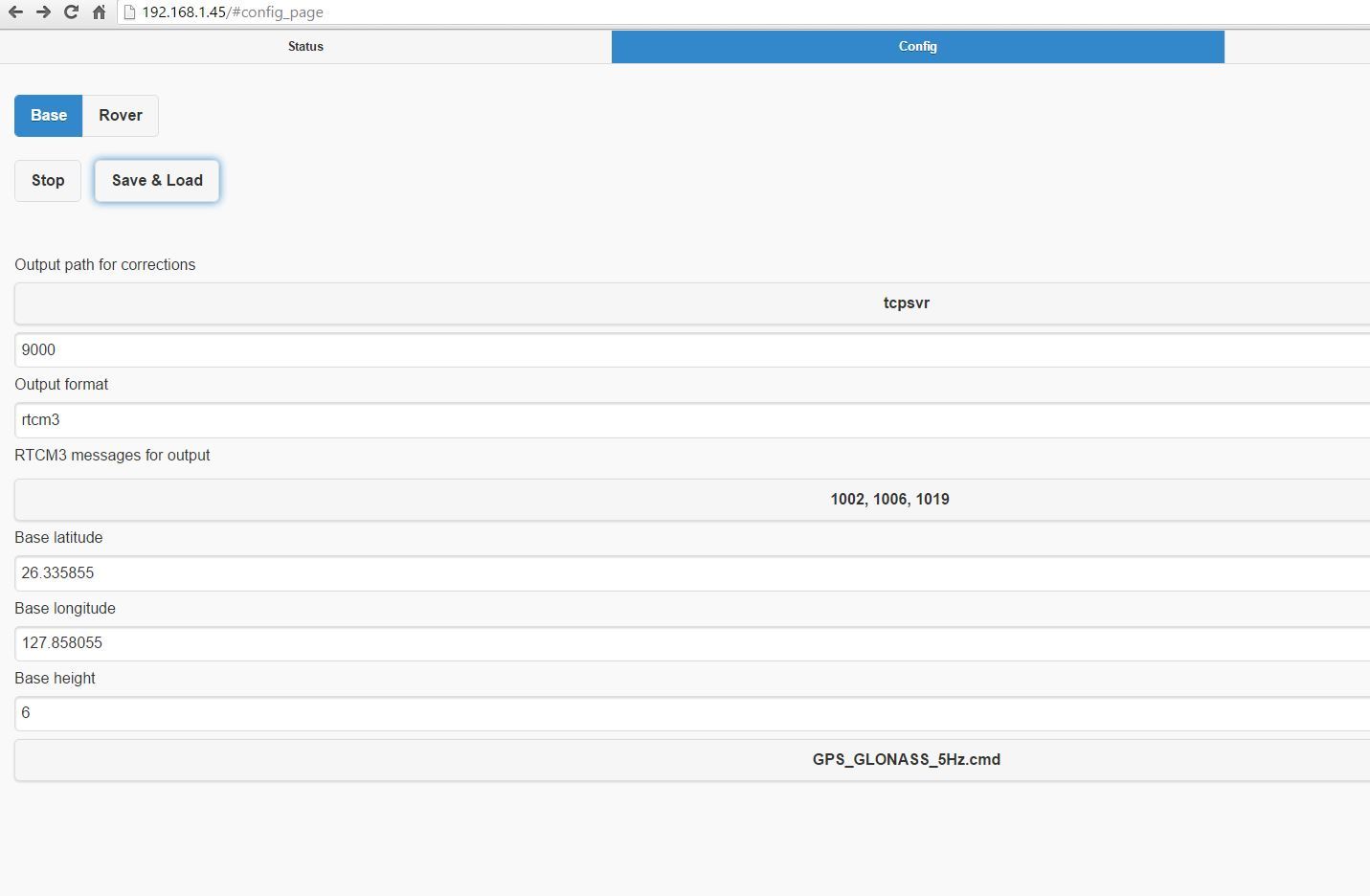
check your base coordinates are as accurate as possible