



Its just says “Converting log to RINEX… Approximately time left: (some time)” and then “Your download will begin shortly” and it never download. Im just waiting for the log file to get download.
I’m sorry, I forgot your predicament with downloading.
I have also had log downloading problems. Before ReachView 0.4 log download would not work on my Android device, but it worked fine on my computer with Firefox, and after upgrading to ReachView 0.4+ I couldn’t download anymore in Firefox 45, but then I was able to download with my Android device. So, today I have removed Firefox 45 in favour of IceCat 38 and the log downloads are working again.
Anyhow, if the logs aren’t downloading for me, I just use the scp command to get them.
Actually after selecting RINEX version: 3.02 and updating ReachView version, I can able to download my log files.
Here are the files:
rov_201607050406.zip (5.9 MB)
ref_201607050406.zip (7.9 MB)
Good! I will try them out.
The first thing I notice is that you are missing some satellites:
Base:
- 12 GPS
- 1 QZSS
- 2 SBAS
Rover:
- 12 GPS
- 1 QZSS
- 2 SBAS
- 10 Compass/Beidou
Check that you have RTCM3 message 1127 enabled and that you have selected GPS_BEIDOU_5Hz.cmd
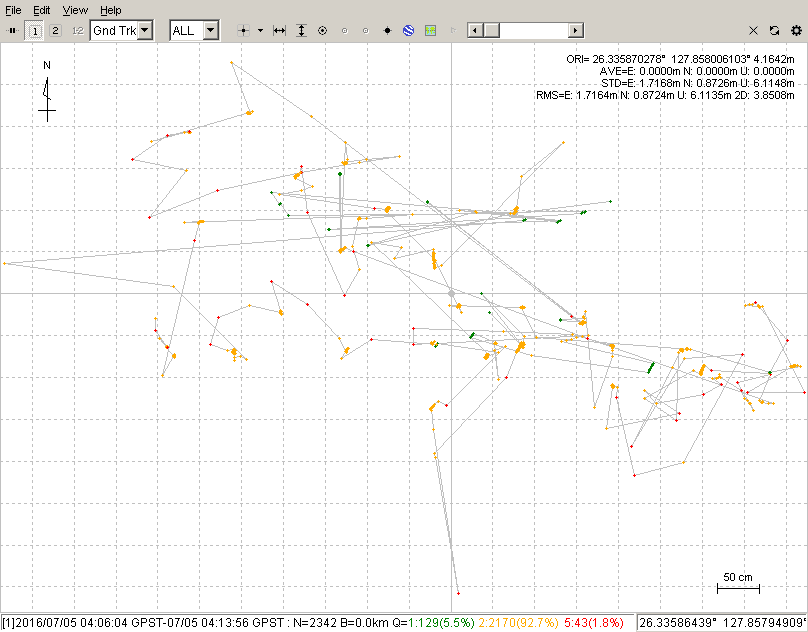
Post-processing did get some fixes, but they are all over the place. Was the base/rover moving/stationary?
Both stationary
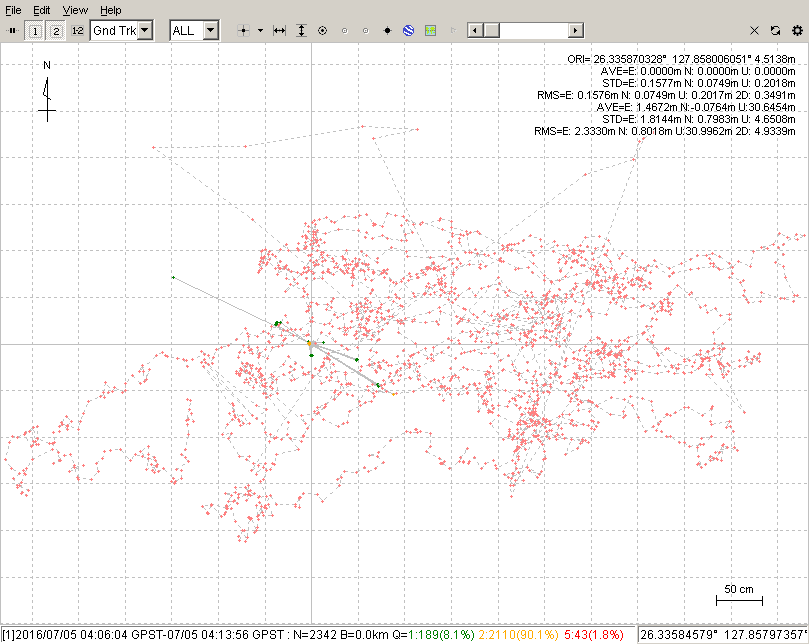
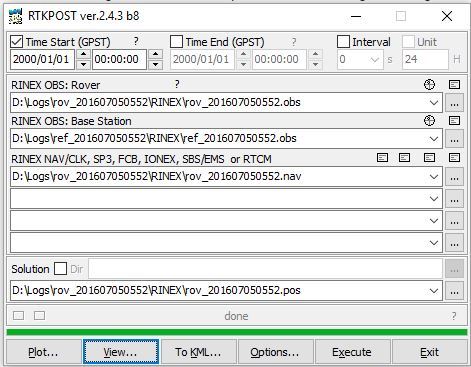
I think the problem is the base file then. Here are some better results after processing with:
time interpolation of base station date = ON
(found under Options -> Misc in RTKPOST.exe and under Advanced Settings > misc-timeinterp in ReachView rover mode)
All positions
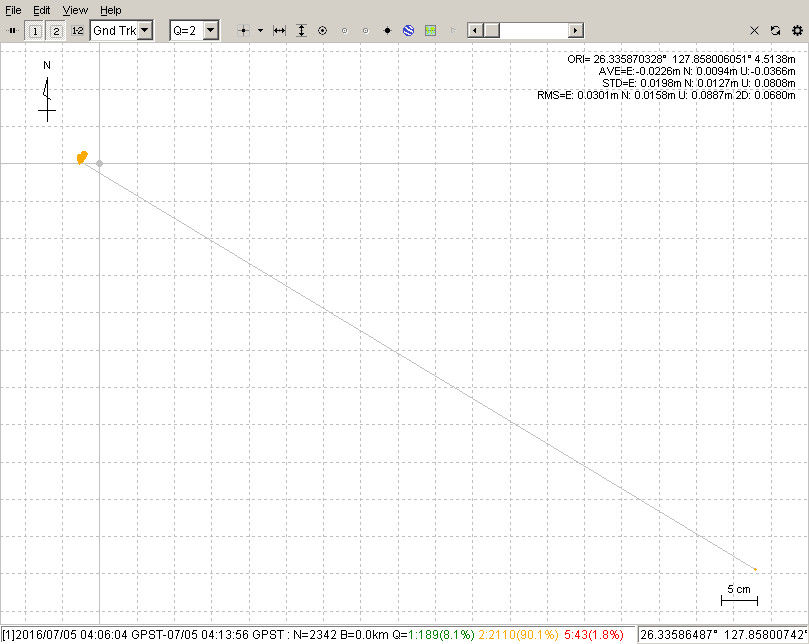
Q=2 only
Q=1 only
That setting is not the solution, it is only a bandaid. And I still I think you need a better base log file. I’m not sure what to suggest for you to get a better base log.
1 Like
Is the problem with base then?
I feel that all the base RTCM3 base corrections did not get to the rover, and the problem could be wifi, but this is only speculation. Not forgetting that you are missing all the Beidou/Compass messages. Moreover, I have made another breakthrough with your log files, namely I have excluded certain satellites from the processing: G10, G22, G23, G27. These were excluded because of their low SNR values (which ReachView does automatically with a default of SNR > 35)
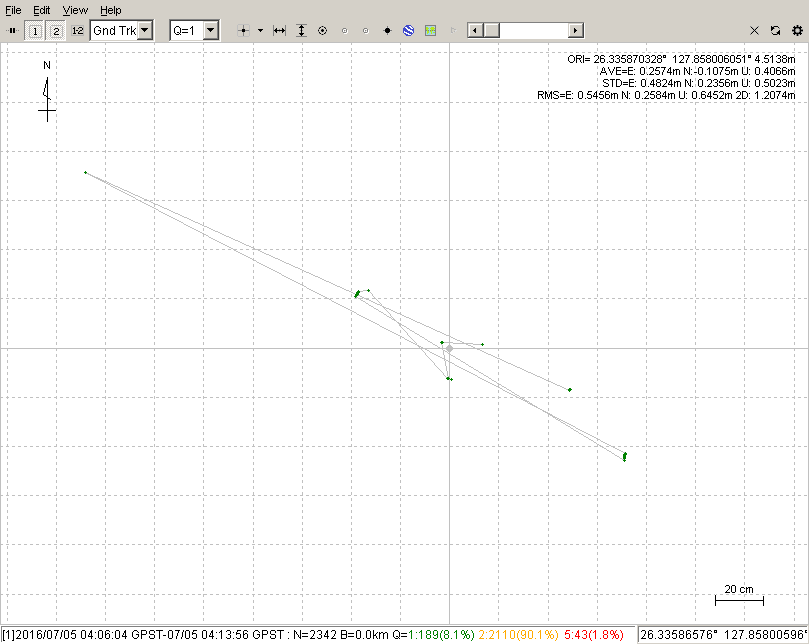
This is an example of ‘forward’ processing. Like what ReachView does in real time.
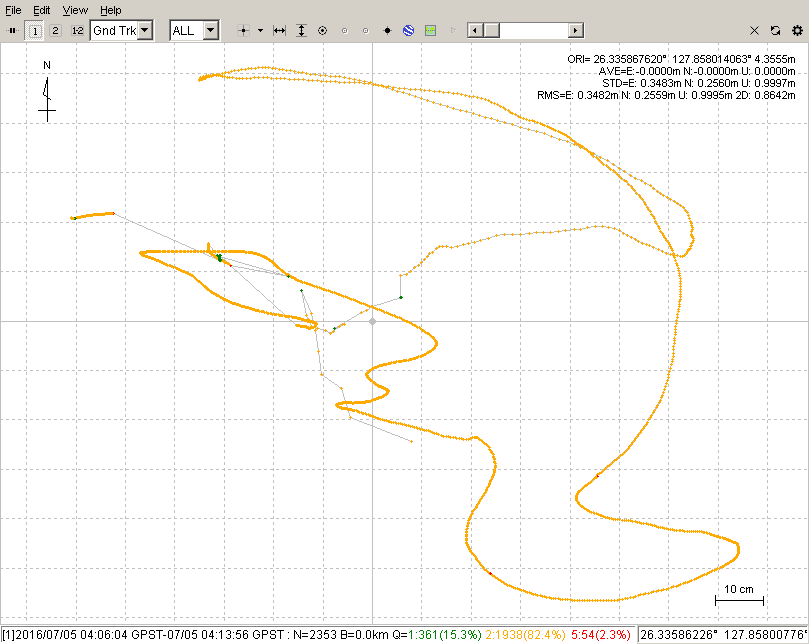
Here is the same settings but ‘combined’ instead of ‘forward.’ I believe this can only be done in post-processing because it processes the file forwards in time, and then once more backwards in time and then combines the two for a better result.
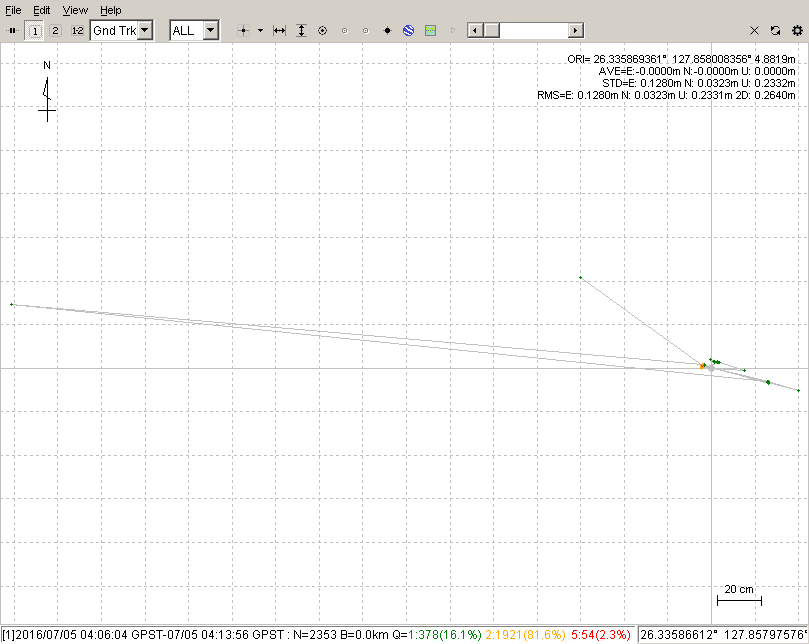
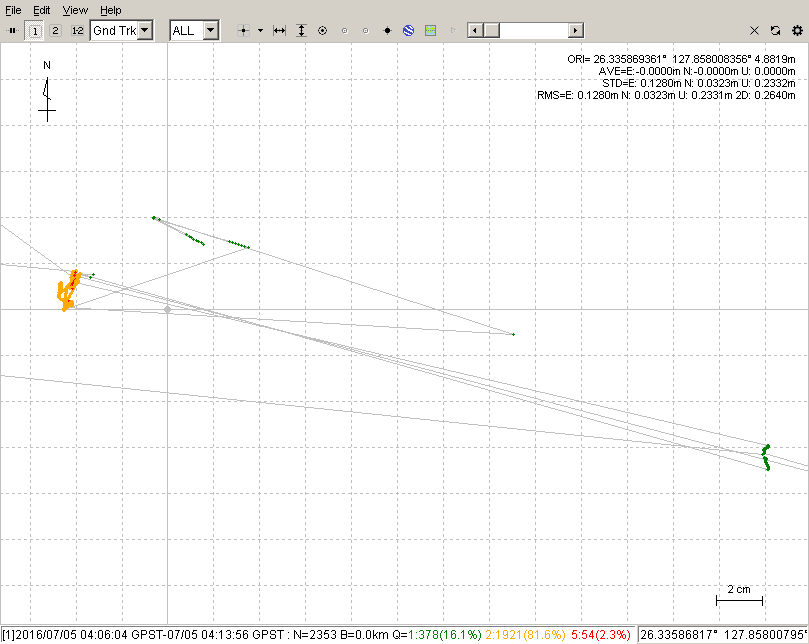
The same as above, but zoomed in.
After seeing these results, and noticing that the fixed positions were coming in the last 2 minutes of your 8 minute log. I think 2 things will help greatly:
- to get the Beidou/Compass satellite messages coming from the base which should decrease your time to fix, and
- until then, make sure you spend a longer time logging a certain point.
Also, you could consider post-processing your log files to obtain a better result than can be achieved with RTK.
2 Likes
For post-processing, I am afraid whether I put correct data or not.
These are the details:
1 Like
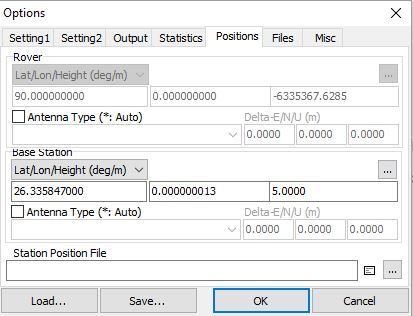
- Base Station longitude is not correct under the Positions Tab
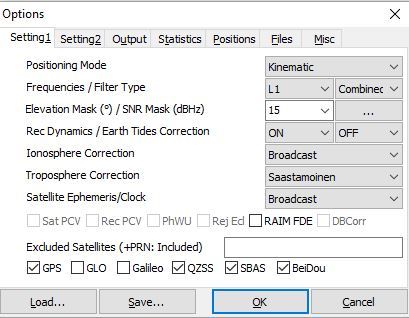
- the checked satellite systems are correct under the Setting 1 tab.
- However with the log file you provided, my best results were with GPS checked and everything else unchecked. I had also put this text in Excluded Satellites:
-G10 -G22 -G23 -G27and that is only good for the log file that you uploaded.
- However with the log file you provided, my best results were with GPS checked and everything else unchecked. I had also put this text in Excluded Satellites:
The next step is to get the Beidou satellites working. I’m unsure how to help you with that for RTK in base mode, but if you are OK with post-processing only, then you could put both Reach units in Rover mode and both with the same settings and then post-process the logs.
In the meantime, hopefully someone else will suggest what problem might be with the Beidou RTCM3 messages not working in your base log.
My main objective is RTK positioning in real-time and not post-processing. Let me know if you or anyone can find the solution.
Im also looking for why I am not getting Beidou satellites.
Regards
It took me a couple of days, but I have found a workaround for you. My base started sending Beidou messages after I did this:
- I assume you have all log messages checked now (like I did)
- uncheck the first half of the messages list
- save and start the base
- stop the base
- re-check all the messages in the list
- save and start the base again
For whatever reason that worked and my Beidou (C**) satellites started appearing in my base log. Maybe it re-writes some lines in the base configuration file?
Let me know if that works for you!
1 Like
I’m experiencing something similar too. In short changes in ReachView sometimes seem to commit and other times do not.
The only surefire way I’ve found that works, when tweaking is to let both reach units come up. SSH in both of them and nuke the server.py process. Run server.py manually from the cli. Every time you make a change, save it, and stop and start the server. I had to do this to work around the the rover not being able to swtich from rtk setup profiles, and not committing changes in a single profile between starting and stopping the server.
I think Emlid mentioned they are working on a whole new Reach interface so hopefully that is part of the fix.
Ha! That would do it for sure! When I had problems, I learned that this method would work for me:
1 Like
Hello @bide
Thanks for your reply.
About this, do i have to uncheck in RTKPOST application. If yes, then where?
Or you talking about in ReachView Application to uncheck or re-check RTCM3 messages for output?
Yes, that is what I meant.
Hello @bide
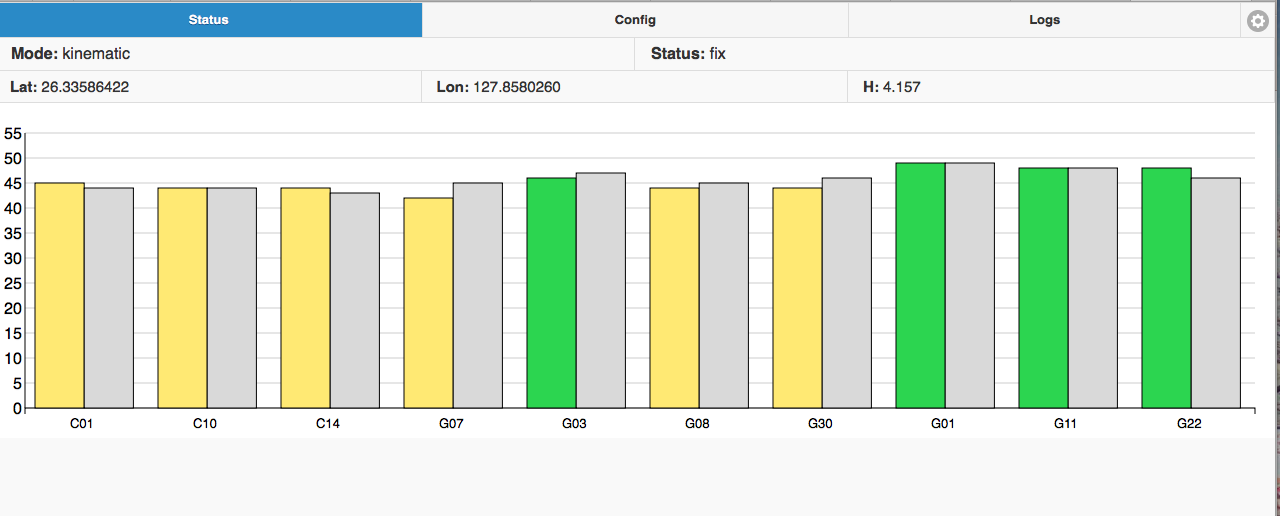
Thank you very much for your help and support. I really appreciate. I am able to get “Fix” for maximum time.
I don’t know which part made it fixed. But after trying your these methods,
I could able to get “comp” satellites.
What I did to get fix:
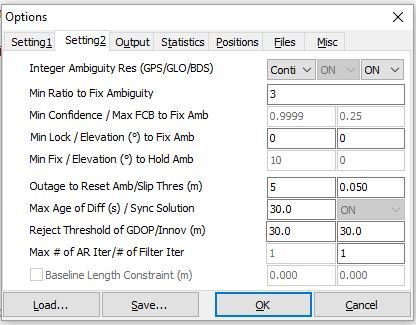
I checked “gps, qzs, comp” and integer ambiguity threshold value “1.5”.
Also, I did another another time with only “gps, qzs, comp” with same integer ambiguity threshold value.
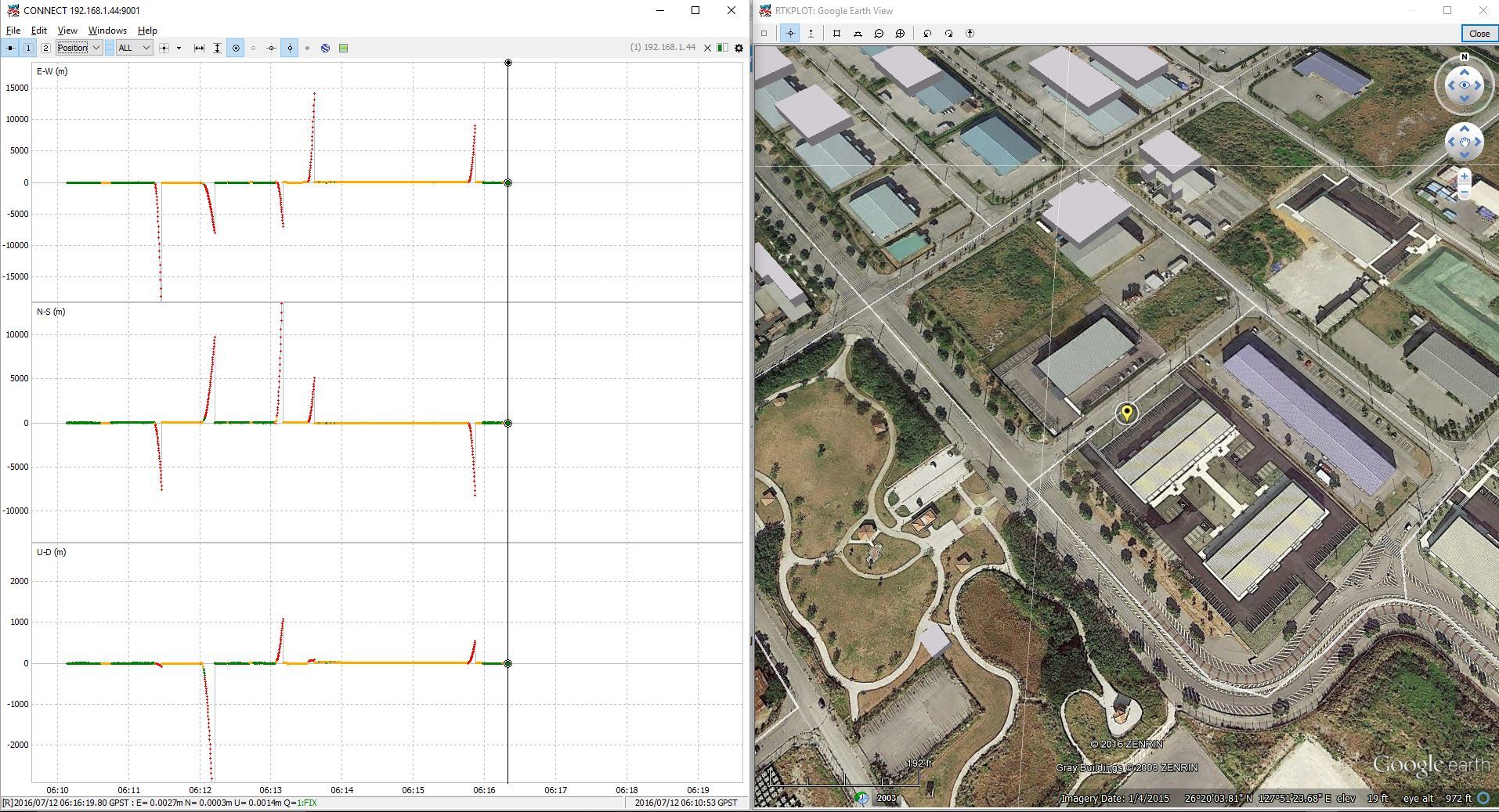
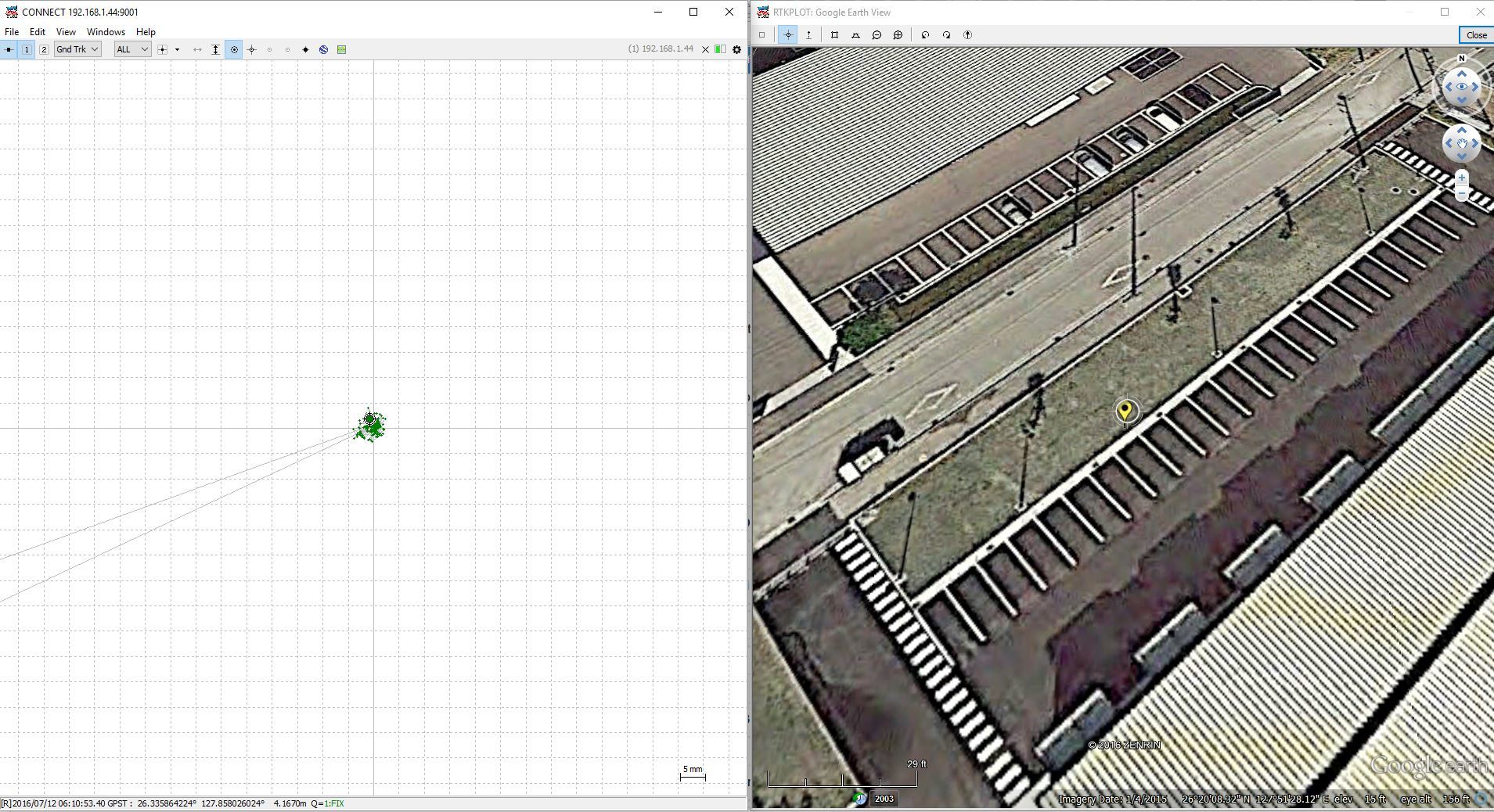
But in both cases, my position fluctuates too much.
These are the results (results are for gps and comp satellites):
I just need one favour:
How carrier phase measurement is applied for accuracy. What is the theory? (I am still into learning stage that is the reason for asking this question)
1 Like