



Hey Igor,
We haven’t managed to reproduce this behavior yet.
Hey Igor,
We haven’t managed to reproduce this behavior yet.
v2.17.4 dev has been pushed with several important Bluetooth fixes. Details in the updated post above.
It does not show that the update is avail yet .!
Are you sure the device is able to access the Internet?
Yes it is connected because I just updated to dev from stable version
This is a release mostly aimed at RS+ and M+. We’ll make the release for RS and Reach later this week. Sorry for the confusion.
Ok thats the story. Thanks
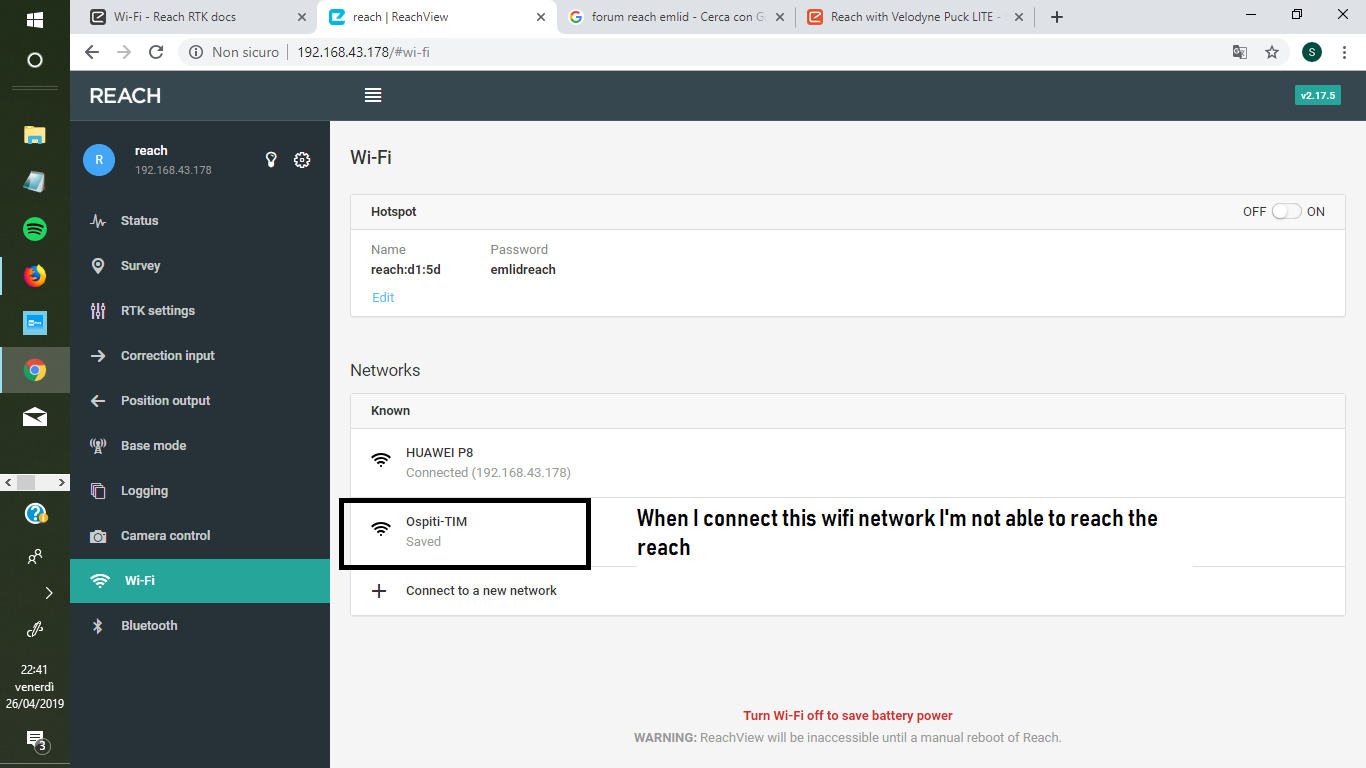
I tried 2.17.5, but still couldn’t get the network device to show up on my laptop. I reverted to 2.16.2 to get access to Ethernet over USB again.
I have the same problem !
2.17.5 ??
does not exist 2.17.5 was wrong is version 2.17.4
according to this screen shot https://community.emlid.com/uploads/default/original/2X/3/32c7ab9f095b7954b392cbc31edcdc13d843b0bb.png
I updated my two units yesterday and the version in 2.17.4 ???
yeah, what’s up with that? v2.17.5?
Wonder if the latest works with RS NON-PLUS yet?
I have a problem after update my Reach RS to this version because I have lost the Corrections output through USB-OTG connection. My radio does not receive signals from the unit.
This is the status report:
app version: 2.17.5-dev-r0
'wifi_status, interface: wlan0':
- wifi_mode: wpa_supplicant
- ip: 192.168.1.53
is_connected: true
mac_address: 90:b6:86:0b:3c:32
ssid: JAZZTEL_2016
base mode:
base coordinates:
accumulation: '1'
antenna offset:
east: '0'
north: '0'
up: '0'
coordinates:
- '0'
- '0'
- '0'
format: llh
mode: float-and-hold
output:
enabled: true
format: rtcm3
path: serial://ttyUSB:115200:8:n:1:off#rtcm3
type: serial
rtcm3 messages:
'1002':
enabled: true
frequency: '1'
'1006':
enabled: true
frequency: '0.1'
'1008':
enabled: true
frequency: '1'
'1010':
enabled: true
frequency: '1'
'1019':
enabled: true
frequency: '1'
'1020':
enabled: true
frequency: '1'
'1097':
enabled: true
frequency: '1'
'1107':
enabled: true
frequency: '1'
'1117':
enabled: true
frequency: '1'
'1127':
enabled: true
frequency: '1'
gps:
enabled: false
frequency: '1'
qzss:
enabled: false
frequency: '1'
bluetooth:
discoverable: false
enabled: false
pin: '***'
correction input:
input2:
enabled: true
format: rtcm3
path: osmunda:***@ergnss-tr.ign.es:2101/VRS3
send position to base: single
type: ntripcli
input3:
enabled: false
format: rtcm3
path: :9028
type: tcpsvr
logging:
base:
format: RTCM3
started: true
version: null
correction:
format: RTCM3
started: true
version: null
interval: 86400
overwrite: true
raw:
format: RINEX
started: true
version: '3.03'
solution:
format: LLH
started: true
version: null
lora:
air rate: 2.6000000000000001
frequency: 868000
output power: 20
position output:
output1:
enabled: false
format: erb
path: ttyMFD2:57600:8:n:1:off
type: serial
output2:
enabled: false
format: llh
path: :2013
type: tcpsvr
output3:
enabled: true
format: llh
path: :2014
type: tcpsvr
output4:
enabled: true
format: llh
path: :2015
type: tcpsvr
rtk settings:
elevation mask angle: '10'
glonass ar mode: 'on'
gps ar mode: continuous
max horizontal acceleration: '1'
max vertical acceleration: '1'
positioning mode: static
positioning systems:
compass: false
galileo: true
glonass: true
gps: true
qzs: true
qzss: true
sbas: true
snr mask: '20'
update rate: '1'
How could I get back to the latest stable version, please?
Just reflash the firmware.
Thanks. I finally did it. Hope this issue will be resolved in the next stable version.


{kind=link}