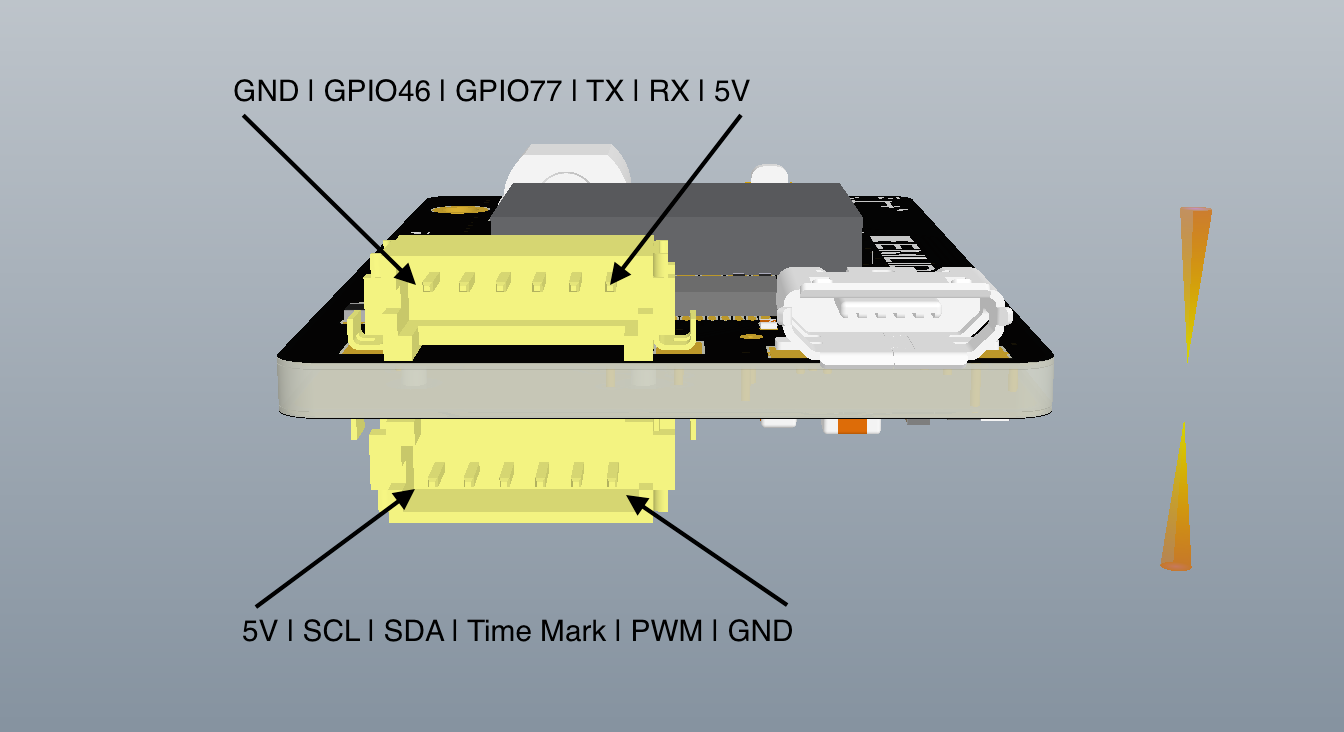
Reach was built with precision mapping applications it mind. One of the big challenges in UAV mapping is eliminating Ground Control Points which are time consuming and costly to place. Reach RTK can help achieve that by synchronizing with the camera shutter on sub ms level. I have written more about this in a previous post. All you need to do is connect hotshoe adapter to your camera and wire it to Reach port. Only two connections are required “GND” and “Time Mark”:
During RINEX conversion on Reach you will see a new field that will show how many time marks have been collected. That should match the amount of pictures taken by the camera.
Those of you who have access to GrafNav can already start mapping and getting accurately georeferenced pictures. Thanks to @Stu74 we know that it parses time marks from RINEX and interpolates the post processed coordinates.
We have also implemented this feature in RTKLIB and will release modified RTKPost soon.
As usual new amazing features are brought to you by @egor.fedorov’s and @alexey.bulatov’s countless hours of work
Emlid is going to make right what is broken about UAV mapping.
Congratulations! The hotshooe adapter will send a pulse for the Reach module on every shoot time, is it? I use de df6 connection with pixahawk controler and a Samsung NX300 camera to be trigged - it seems that this is made for my setup!!! So glad!!!
Hello Igor, thats good news.
Could you share the link to purchase that hotshoe, I have Piksi RTK and I would like to try its accuracy with this solution.
thanks.
good job , hope a wifi version will came soon for a sony a7r. … I can test if you need
try to find right now a place to buy the hot shoe on the web , any sugestion ?
@Kyle_Gardner Sure! We are now working on some modifications in RTKLIB that will allow to process the time stamps. As soon as it is ready we will make a tutorial.
@Bernard_Theuri Reach has an IMU on board, but it is not being used at the moment.
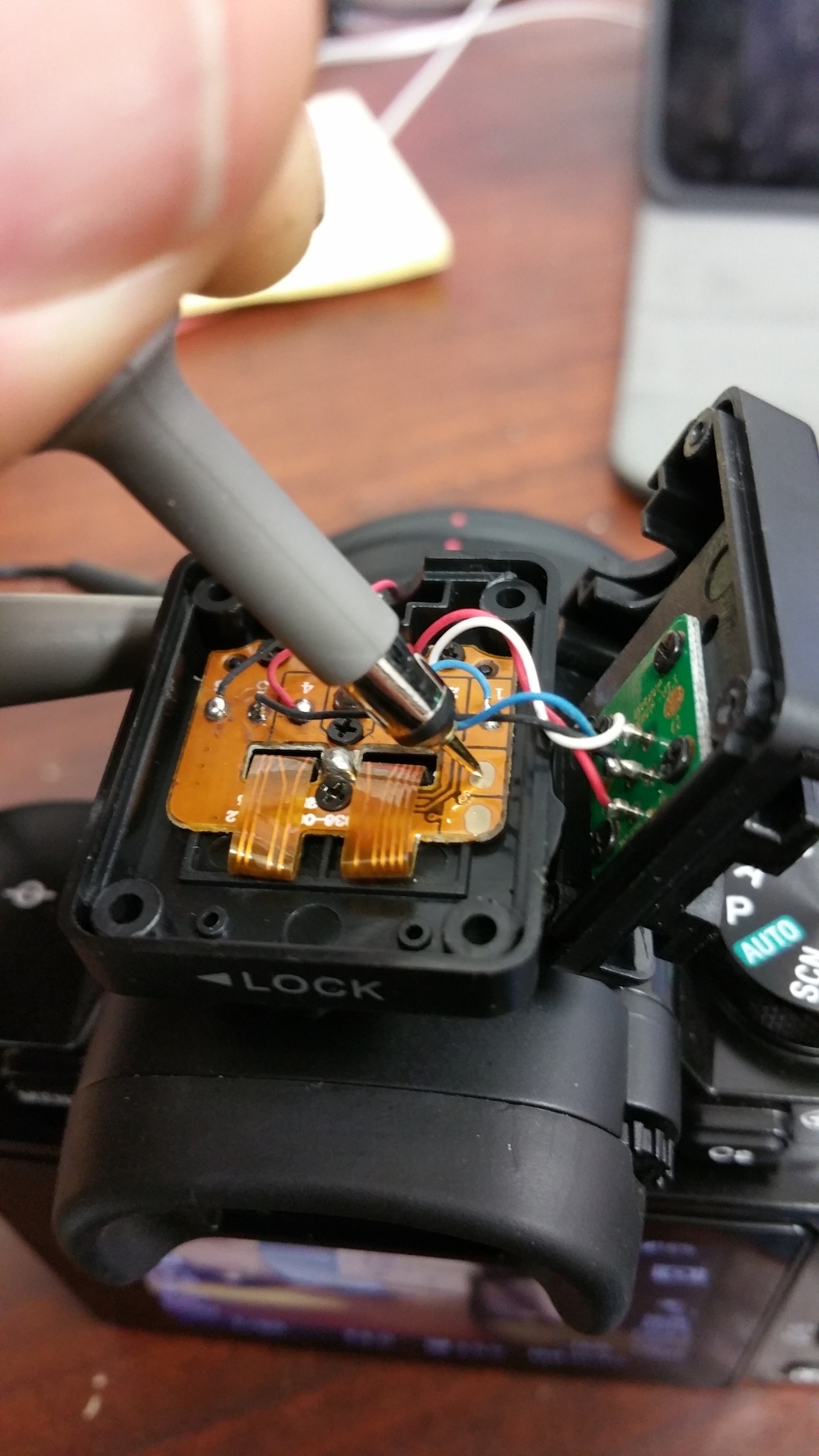
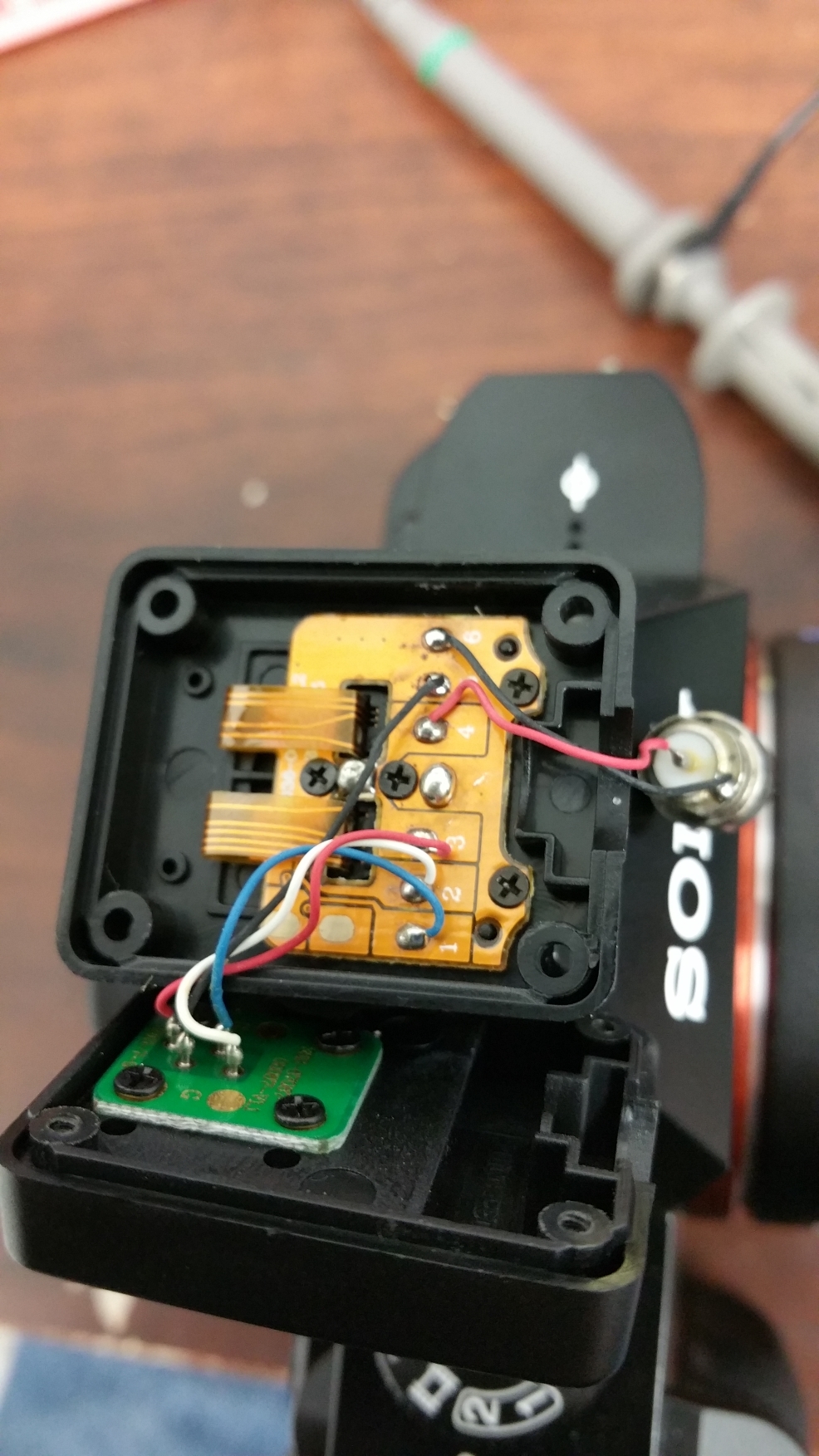
I made an hot shoe adaptor for the sony a7r to reach.
I try few log on the system in rover in kynematic mode with base with 3dr modem comunication.
Try to find the gps log corresponding to the photo taken with rtkpos.
Not a succes for now cause rtkpos mention there is no nav data on the log file… need to investigate and more with rtklib…
I know my test is not precise cause of the bad weather is and bad reception of the gps for my test. rain so test inside with a wood roof. will test tomorow the weather should be better.
but I found this on the rov_201605132212.obs file in rinex folder from the rover reach log :
We have just uploaded a custom RTKLIB build in the docs. You need to process as usual and it will output 2 solution files that you can open with RTKPLOT. One of them will have your timemarks coordinates. Note that currently you should not use SBAS when processing with RINEX3.x. If you need to use SBAS, please use RINEX2.x .
Not faster than the update rate, so at least 200ms in your case.
We got everything to test it! Superb! Something works - superb! But please help:
Some questions left…
Now we are able to see in rover obs the “Time mark not valid” when there is no GPS reception. So the hotshoe on nex7 is working. After it we go outside. The reception is switching between float and fix so working. In the rovs obs file during the download they say it contains 8 time marks - which is correct. But:
how can we found it in the obs file?
does here a sw to process it on exif’s of photographs?
We used kinematic default profile with rinex 2.10 and gps,sbas,glo,qzs. Fw is 0.4.9