After a short break, we are back with new features and fixes:
New features
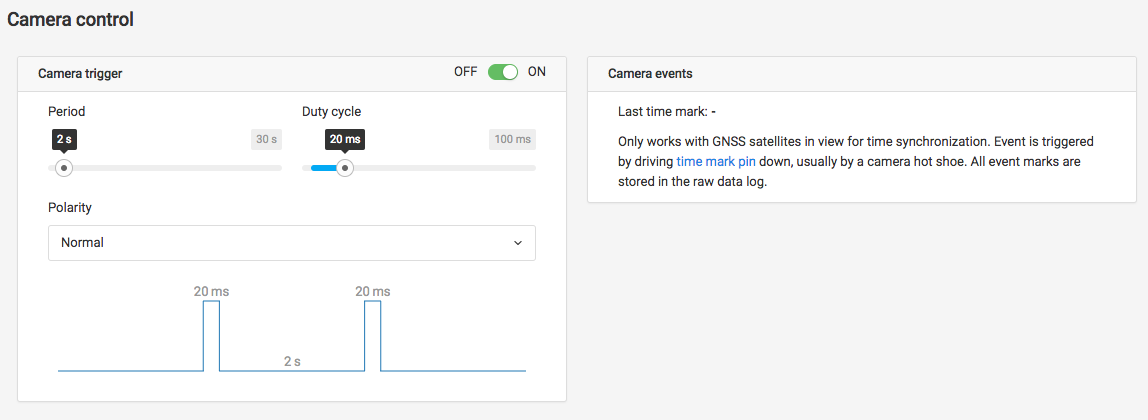
RCH-16 RCH-341 RCH-460 Added a special camera tab. Shows the time of the last received time mark and allows to setup Reach to trigger the camera automatically
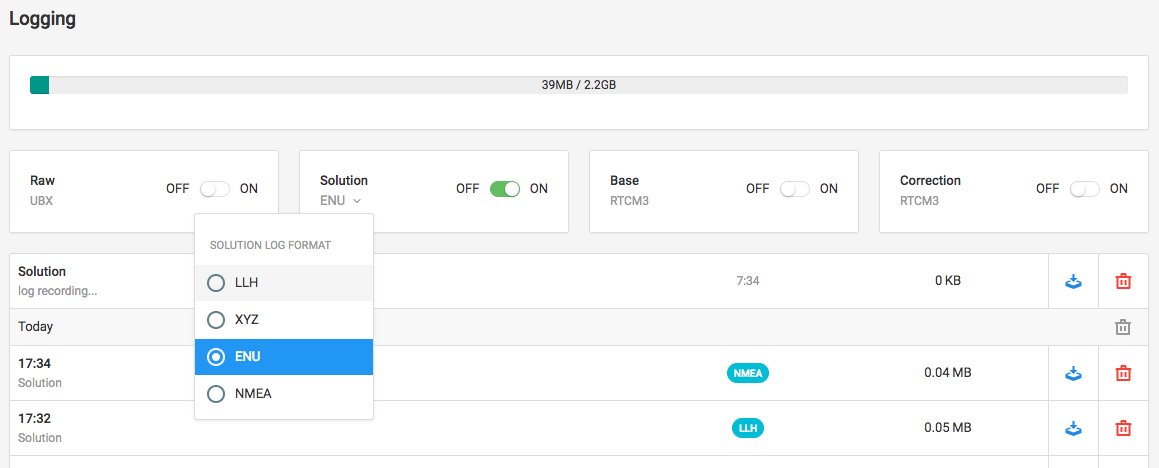
RCH-430 Added a button to delete logs from a whole day
RCH-441 Automatically retrieve mountpoints available on an NTRIP service. Just enter the address and the port and the mountpoint text field will turn into a neat selector. If Reach has a single solution, it will even select the nearest available base station
RCH-418 Added units for the max acceleration settings
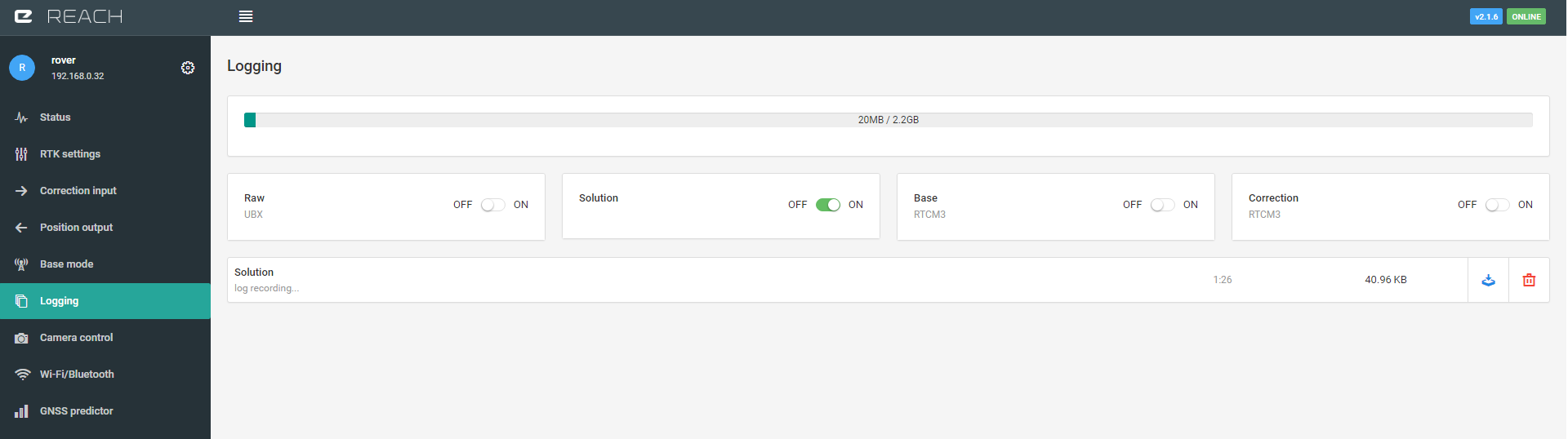
RCH-433 Logging page reapplies logging settings
Documentation
We have updated our post-processing tutorial. It now has better screenshots and is much easier to read. It also includes a guide on using RTKCONV, required by these beta releases. Big thanks to @andrew.yushkevich for this!
Thanks Egor for the Christmas gift! Happy Holidays for you Guys also!
Can you elaborate on the camera triggering feature, how to connect - i.e. which pins, is it direct triggering or via some of the PWM based triggering cables?
Nice Christmas present, thank you!
Will there be an option for distance triggering the camera? Maybe combined with a 3d geofence (start trigering at a certain height above ground?) or the possibility react on camera trigger signals from arducopter or even load the mission file from arducopter?
@vbnhu The triggering feature runs on the GPIO183, it is just a digital pin output. On the diagram pin is marked as PWM, however we do not use PWM functionality of it. https://docs.emlid.com/reach/electrical-specs/
@tobias-dahms It is best if the autopilot is triggering the camera and Reach is catching the events from the hotshoe. We are providing this feature for those who do not have camera triggering supported in the autopilot.
Is there, then, a simple way to add a manual trigger to trigger events on the ground? I.e. a cable and button to record points while the reach is on a pole on the ground? I realize you can do this in a tablet via bluetooth, but I’d be interested in playing with the simplest possible way to record points on the ground.
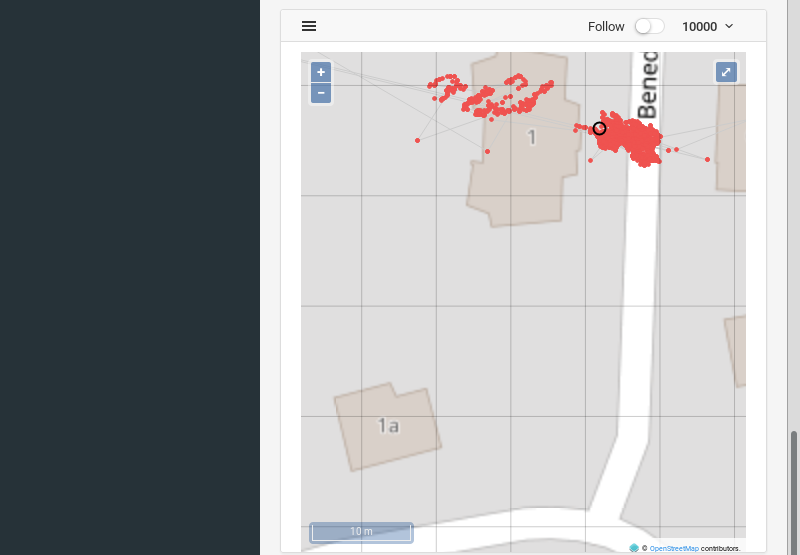
@egor.fedorov There seems to be a bug when the window width has a size of ~787px. When I toggle the menu the map proportions doesn’t get an update. The result is that the map gets distorted.
Hi, i need to get bearing from reach, there is no heading value in nmea GPRMC given by reach, what can i do? I have implemented a method caclculating by using actual postion and old position, but is to inaccurate