I did a short flight test today with a Foxtech map-02 and a combo Reach RS / M+
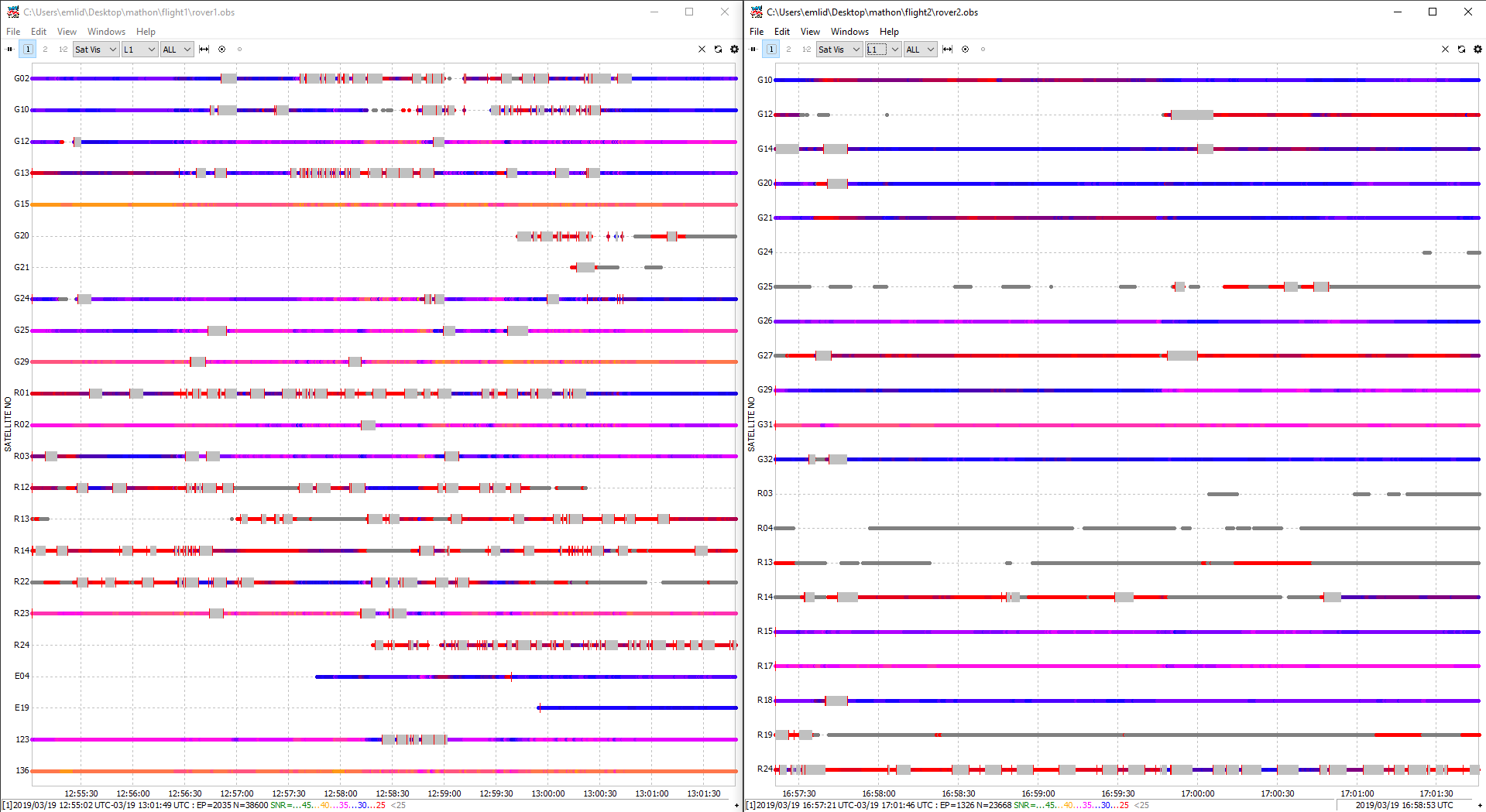
I took 116 pictures, I was able to find the same amount on my arduplane log, but the Reach gave me 130. You will find logs from base and rover Here
Later today, I did a ground test with manual triggering and got 488 pictures, but the Reach registered only 414. You will also find logs from base and rover here
About the hardware, I am no longer at the office but I connected the camera trigger to my flight controller and the hot shoe from the camera to the M+ C1 pin 1 and 2
In the camera control of the M+ I can see the camera events updating every time I am taking a picture manually
The actual frame rate during a flight i about, one picture every 0.7sec
I wrote some code on an arduino board, counting the number of trigger from the PPK/Hotshoe output on my camera and it’s working perfectly, I consistently get the same number of trigger and photo.
So the problem is with the Reach M+ and we need to find a solution
In another post about Foxtech camera, 2.11 seems to have fixed the problem, why not try that.
Providing that Reach captures the events correctly at 1fps, I assume the issue is caused by the frame rate parameter. Perhaps the camera outputs signal somehow different from what Reach expects at 2-3fps.
We didn’t change the way Reach M+ logs time marks since v2.11 so I don’t think firmware version involved here.
Also, we never tested this camera and don’t have one to investigate why this behavior occurs, therefore it’s difficult to make predictions. At this point, I’d recommend checking with an integrator and look through community forum threads about this camera model.
Hope, some of the more experienced Foxtech users will help you.
I don’t think that will solve the problem, but I would bring the Reach unit away from all that probably noisy electronic you have inside your uav.
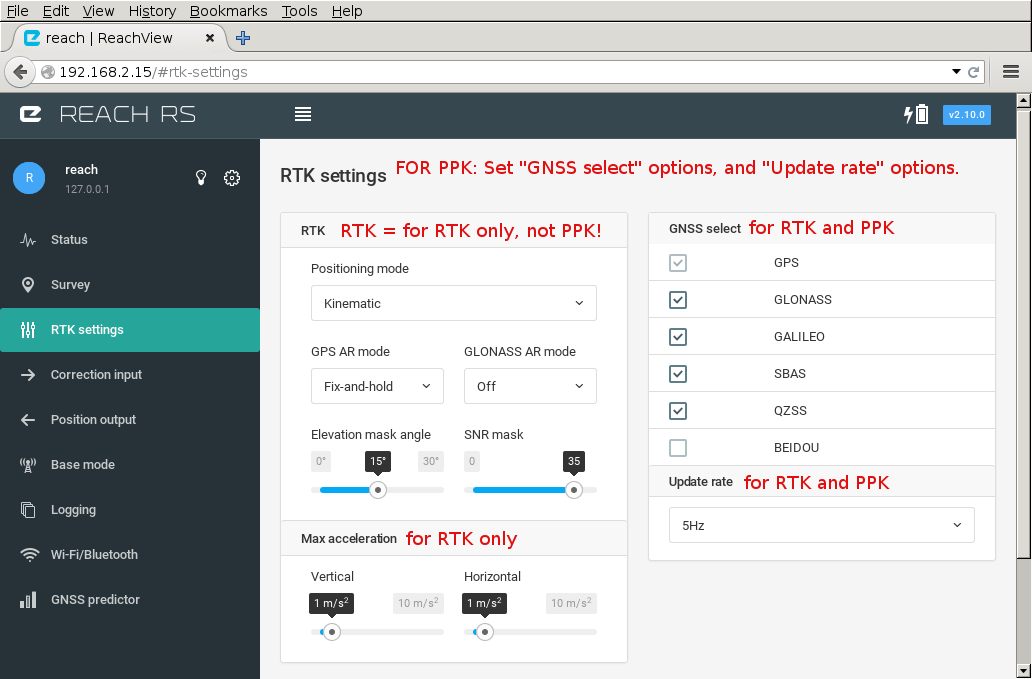
I think a possible reason why this happens could be that some of the pictures are taken with an interval shorter than 200 ms when you are working with 5Hz. Please try a configuration with 10 Hz and report whether the same problem occurs or change your Arduino code so that it reports if the image interval is shorter than 200 ms.
Explanation: the uBlox module will only report the last timemark within the epoche. If you work with 5 Hz only one timemark per 200 ms will be reported.
I tried to use GPS only at 10hz but nothing, still missing some images even if it’s a flight with 34 and 35 pictures. on my event file, only 32 and 31 are recorded. I also played with the trigger duration on mission planner from 100ms to 500ms and no luck. by the way I changed the lens and reduced the overlap, now the time between pictures is about 1.5 second.
I moved the antenna on the top with a clear view.
I tested it, with a program on arduino and a relay that triggered the camera, with a delay between frame of 1s, 950ms and 900ms, every time with a trigger duration of 100th second, no issue except double recording in the event file for the first frame, the antenna was inside a building.
So I am really getting desperate, maybe I have a faulty unit or something else…
Test on the ground, no need to fly. Arm and let’s trigger your camera by autopilot. Don’t be too agressive on time trigger, there is buffer in camera. It’s just an a5100 Sony customised.
Based on the test done before it is clearly a problem with the Reach module. The Arduino and the Pixhawk are working.
Now its time to use the Reach module without any exteral things but the camera and a usb power device, preferably 2 different power tanks. And outside the plane of course.
I have seen massive problems with the reception when Reach was connected to a 3DR radio clone frome Drotek. So I think problems introduced by the power source or the telemetry connection are possible. Maybe there is also a pattern which events are missing, probably events during/after high power draws/voltage spikes etc.?
You may also add a small resistor between the camera an Reach if it is not already there.
My goal is to move the antenna on top of the nose closer to the pitot tube, move the FPV camera under the nose and move the video transmitter under the belly.
I have some copper tape, do you recommend me placing some under the antenna?