We recently received our EMLID REACH units. First, I am a Land Surveyor in the U.S. with a heavy background in GNSS and UAS. We are very impressed with the REACH!
Our first test was to check a known survey monument set by the NGS. It was a Second Order Class 1 Vertical, Class A monument with B stability rating. Published accuracies were 2.9mm Ellip and 2.7mm Horiz at the 95% confidence level.
First, we setup the REACH on a tripod over the monument with a plumb bob (I know it’s not the best setup, but we were excited to try it out). We measured the height with a retractable construction tape measure (Again, not the most accurate height measurement).
Next, collected two separate 20-minute static observations with the REACH.
We downloaded the RINEX files from the REACH along with RINEX files from two NGS CORS Stations. One CORS station was located approximately 5.1km (3.2 miles ) away and the other approximately 50km (31.1 miles) away.
We then downloaded the RAPID ephemeris file from IGS.
Each observation was then post-processed using RTKLIB to the 5.1km station. We received a fixed observation with only 5-7 minutes of observation data. The absolute position of the REACH agreed with the published position of the NGS monument within 2cm horizontal and 3cm vertical. This error could be due to our less-than-ideal setup and measuring (i.e. plumb bob and retractable tape). The relative error between the two separate REACH observations was 1cm horizontal and 2cm vertical. This is excellent!
We then post-processed the 50km baseline using RTKLIB. The absolute position of the REACH agreed with the published position of the NGS monument within 37cm (1.2 ft) horizontal and 73cm (2.4 ft) vertical. We didn’t think that was too bad considering L1 only and a 50km baseline!
Our plans are to test the same conditions as above using RTK and receiving corrections from a State-Wide CORS Network.
Also, we are in the process of testing the REACH compared to a PIKSI on a UAS with and without GCP’s to check the accuracy differences. We have a “test course” setup with 13 GPS’s all set to less than 1cm horizontal and vertical accuracy for verification.
Thanks to everyone who made REACH possible! We are excited to use it in our commercial operations and continue watching it evolve!
Very Cool! This is what I want to do, so I can make an accurate marker. I’m new to much of the raw data type of information and post processing etc, can you go into details of the hardware and software used? Did you use two separate Reach units, or one for this test? What was used for logging the Reach RINEX files? How and what is RAPID ephemeris files from IGS used for?
I’m looking very forward to reading about any new tests you perform as well.
@RTK I only used one REACH along with the RTKLIB software program called RTKPOST. The data was logged on the REACH and downloaded using the ReachView App. The RAPID ephemeris is used for a more precise position of where the satellites “were” during the observations.
These are very encouraging results! My research group has been using expensive commercial GPS equipment for way too long. We’ve learned to just deal with the many problems that tech support can’t seem to resolve (including the units corrupting its own proprietary formatted data files without any warning) so we’re “on our own” which seems ridiculous from such a large company.
Since my graduate student days, I’ve always been interested in developing my own GPS equipment for our geophysical surveys. We estimated costs would be at least an order of magnitude less than commercial products. Reach has hit that price mark, just need to reconfirm accuracy/precision results. We are working right now with equipment that claims to achieve 10 cm vertical accuracy (in ideal conditions) by post-processing 10 minutes of logged data. We’ve tested this claim in a few specific cases and it seems to be true most of the time. We do, however, collect thousands of points per year for post-processing and I’ve never fully trusted the “black box” software that we have been stuck using.
We have already been planning to purchase a few Reach sets once the next research project funding comes through. We will be testing them against the other GPS equipment sets I currently use as well as the high precision (mm scale) survey equipment at my agency.
I’m looking forward to seeing more of your results and also to running tests with our own Reach gear in the near future.
Very interesting and positive results. Waiting on my Reach to arrive so that I can begin testing along the same lines that you are following. I am a Aviation professor at Hampton University and I am working on my MSGIS at Penn State. Would love to collaborate with you on a project along these lines. I also have my Section 333 and a private pilots license.
Thanks for reaching out!
Sorry it took me so long to respond. I’ve been on vacation in an area with very limited service.
My background is heavily is Surveying, GIS, and Photogrammetry so I’m sure we’ll have a lot to collaborate on. We also have our Section 333 and pilot’s license.
What type of project did you have in mind?
We have some more testing results. This time with both Static and RTK comparisons. Still Excellent Results!!
To save me drive time for testing, I decided to set a monument in my back yard. It wasn’t the best setup, but should do for my initial RTK tests. I used the center of a screw head on the top railing of the deck in my back yard. To get some good coordinates on the point I setup the REACH in static mode and recorded a 20 minute observation. I repeated the same observation 5 days later at a different time of the day. These two observations were post-processed to a CORS monument ~1.9 miles (3 Km) away. I took those coordinates and averaged them together, even though they were only off by a few mm Next, I processed the same observations to a CORS monument 21.8 miles (35.1 Km) away. This was to test the “worst case” scenario for a long distance baseline with a short observation time. Finally, I setup my REACH on our statewide NTRIP server and performed to RTK Fixed observations and recorded the coordinates. It should be noted that I have utilized this NTRIP server with Trimble R8 GNSS instruments for many years and the vertical error between the RTK corrections and NGS monuments are always around 0.15 feet or 4cm. The REACH showed the exact same errors with the RTK corrections…
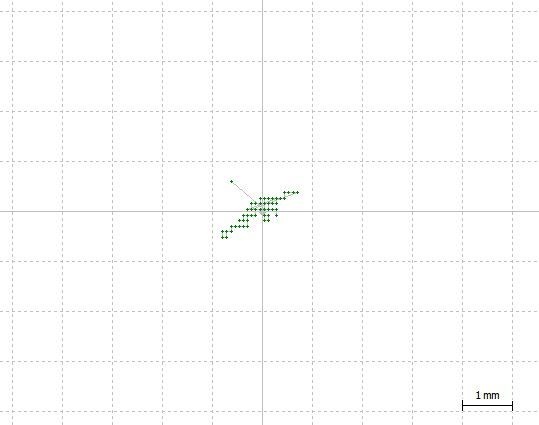
Attached is a table showing the differences between all of the observations. In case you don’t want to download and examine the table, here is a summary of the results.
Short Baseline Static = less than 1 cm repeatable error in x, y, z
Long Baseline Static = less than ~1 m repeatable error in x, y; less than ~3 m repeatable error in z
RTK with NTRIP = less than ~2cm repeatable error in x, y; less than ~5cm repeatable error in z
We are now planning to test these same observations on a mm accurate NGS permanent monument in my area. It may take a few weeks for us to get the observations and post results, but I’ll post them here when complete. We’re also planning to test the REACH mounted on a multi-rotor for high-accuracy photogrammetry with and without GCP’s.
Great stuff Steve! I’ve been meaning to try Reach on a multi-rotor myself. GCP’s are a pain in the ***. I’m still not convinced that Reach will negate the need for them, but I’m hoping that a lot fewer GCP will be needed.
@Global_Saffer I have tested the Piksi GPS on a multi-rotor and found that GCP’s are not needed. So far, in my testing, the REACH far exceeds the Piksi on many levels. Hopefully, I’ll have some data to share in the coming weeks/months on my results.
Hi @Global_Saffer We only utilize APS-C or Full-frame camera sensors. All of our UAV’s are custom built. The UAV/camera/sensor combination you list is good for Ag or low accuracy data collection. If you want higher accuracy, you need to use better sensors and UAV’s that can carry those sensors (typically they are much heavier than a GoPro or Canon S100). Hope that helps!
Thank Steve! I’m a grad student and I’m thinking of doing a project, using Reach. Using the Iris+, Canon S100 and a butt load of GCP we were able to get Lidar levels of accuracy for surveying. My goal would be to get the cheapest, most accurate results possible. I’m trying to get a fair understanding of everything before ordering a Reach module, as I do not have extra cash to spend if I buy the wrong thing. I am hoping to mod the Iris+ with the Reach module.
@Global_Saffer How large of a test site are you planning to fly? The sensor is key to accuracy and a Canon S100 isn’t a great sensor to use, but should work if you have a small enough test site and fly low enough. Otherwise, try finding a used APS-C sensor. You can find them for around $150 on ebay. You shouldn’t need to modify your Iris+ to use the Reach, unless you want the Reach to navigate your Iris+, which isn’t needed for high accuracy results. Good luck!






 Next, I processed the same observations to a CORS monument 21.8 miles (35.1 Km) away. This was to test the “worst case” scenario for a long distance baseline with a short observation time. Finally, I setup my REACH on our statewide NTRIP server and performed to RTK Fixed observations and recorded the coordinates. It should be noted that I have utilized this NTRIP server with Trimble R8 GNSS instruments for many years and the vertical error between the RTK corrections and NGS monuments are always around 0.15 feet or 4cm. The REACH showed the exact same errors with the RTK corrections…
Next, I processed the same observations to a CORS monument 21.8 miles (35.1 Km) away. This was to test the “worst case” scenario for a long distance baseline with a short observation time. Finally, I setup my REACH on our statewide NTRIP server and performed to RTK Fixed observations and recorded the coordinates. It should be noted that I have utilized this NTRIP server with Trimble R8 GNSS instruments for many years and the vertical error between the RTK corrections and NGS monuments are always around 0.15 feet or 4cm. The REACH showed the exact same errors with the RTK corrections… (seriously)
(seriously)