



Originally published at: http://www.emlid.com/reach-rtk-naviopixhawk-integration-released/
This landing looks so good like it is a reversed takeoff video. In reality this is a demonstration of using Reach RTK integrated with Pixhawk. This feature is now available for all ArduPilot based autopilots, including our beloved Navio+ and Navio2.
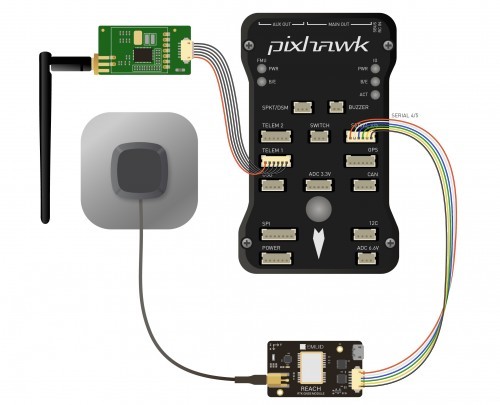
Only single radio has been used, with RTCM3 corrections tunneled through telemetry and Pixhawk. As Reach is equipped with Wi-Fi it is easy to connect to it and use Mission Planner to inject correction data into the MAVLink stream.
We got several requests from the ArduPilot developers not to use NMEA protocol for this integration as it does not carry all required data. GPS gives autopilot more than just location data. Speed, accuracy estimates, heading and more is required for ArduPilot to take full advantage of an RTK GPS. This is why we have added custom ERB (Emlid Reach Binary) protocol. For other autopilot systems NMEA output is available as well.
In this test flight we used ArduCopter 3.3.3-Reach, it is stable firmware with ERB protocol support added on top. We will provide custom builds for now, but considering that this code is already in master we expect to see full Reach RTK support in ArduCopter 3.4 . If you would like to build your own firmware, here is the related pull-request.

We have put together detailed docs about this integration that cover Pixhawk, Radio and Reach settings as well as Mission Planner GPS inject feature.
Reach users will need to perform an update through ReachView app. ArduPilot integration is available in version 0.3.0 or higher.
Only four months since we have shipped first units to our Indiegogo backers and development is moving forward at a great speed! During this time we have been working restlessly adding new features, improving stability and overall user experience with Reach. This release brings an amazing feature - integration with ArduPilot based autopilots. New features also include Bluetooth solution output, which allows to output enhanced coordinates to a number of Android apps, automatic log conversion to RINEX and many more.
Best regards,
Emlid Team
P.S.
You can also read an incredible report by Luke Wijnberg about using Reach for placing Ground Control Points for mapping and general surveying.
Update
We’ve just pushed a new version, v0.3.1. Apart from fixing a couple of bugs, it adds a new parameter to the Rover’s general settings tab, called Dynamics model of the rover. When set to on, it enables a powerful dynamics filter, that significantly improves RTK solution quality, especially in UAV area applications.
This option has one downside, though. It requires a whole lot of computing power, so we will only allow this option with an update rate of 5Hz and less.
We encourage you to try it, as it gives a very nice improvement in performance. Stay tuned for more updates!
