Based on a recommendatation of @wsurvey I will try GPS, GAL & BDU at 5 Hz and see if I get missing events. First trials on the ground had been successful.
I’m running a test now, without copter but under bad conditions.
Did fly yesterday, very windy with mean speeds between 24 and 28 km/h and gusts of 39 km/h. Unfortunately I took 257 pictures and got only 196 events. I think I will have to use a larger groundplane. The UAV is on the right side.
7 cm, I need to look into the virbrations. @VanavaraDigital also gave me a hint to look into the power supply, I will test that on monday first before doing other things.
I have 2217 events and 2221 images. I have to admit that I’m not absolutely shure (yet) if this is caused by me or by cycle slips or by the GNSS combination. I will look into that (and report) later when I process the images and compare the events with the Arducopter logs.
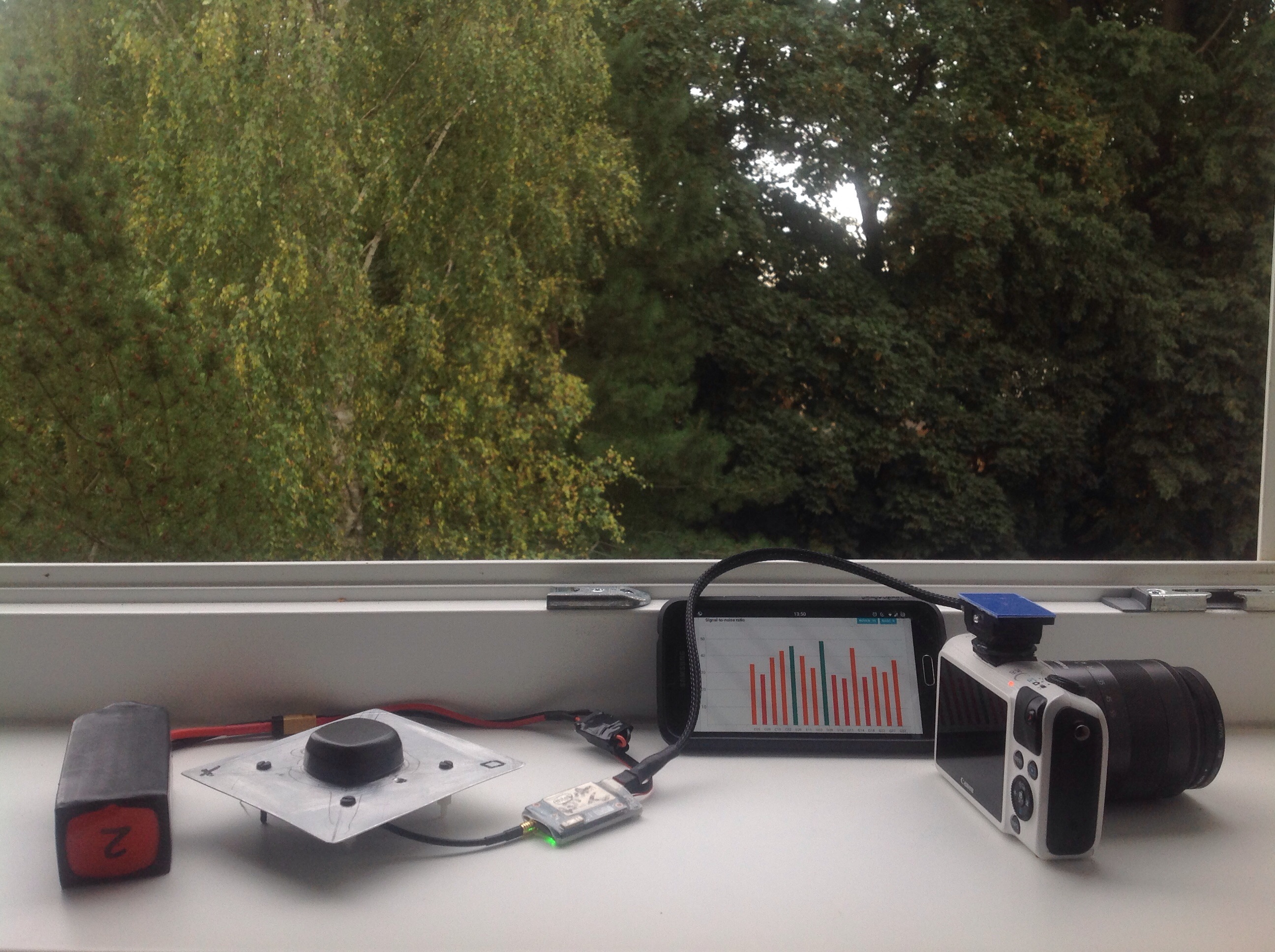
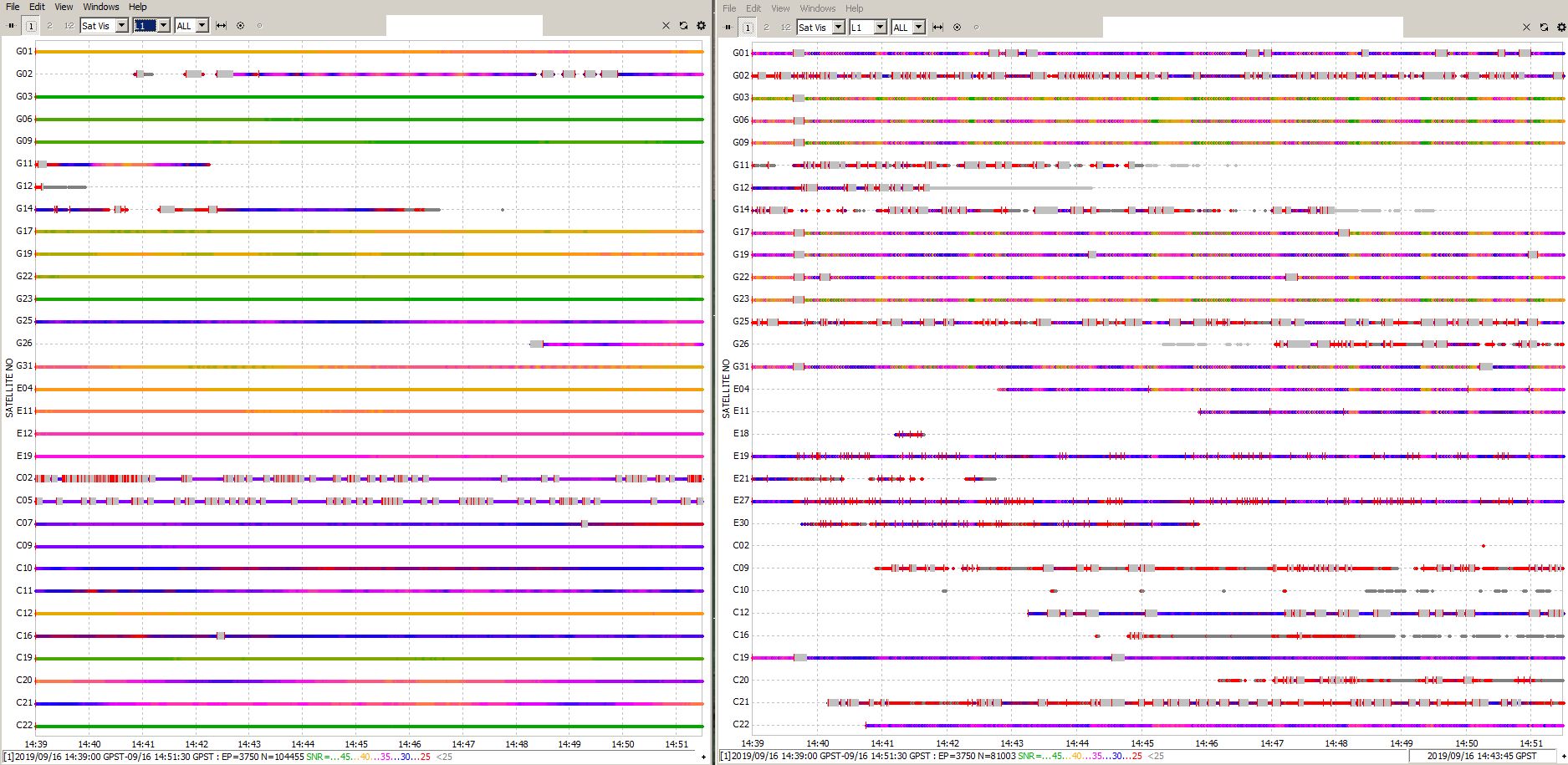
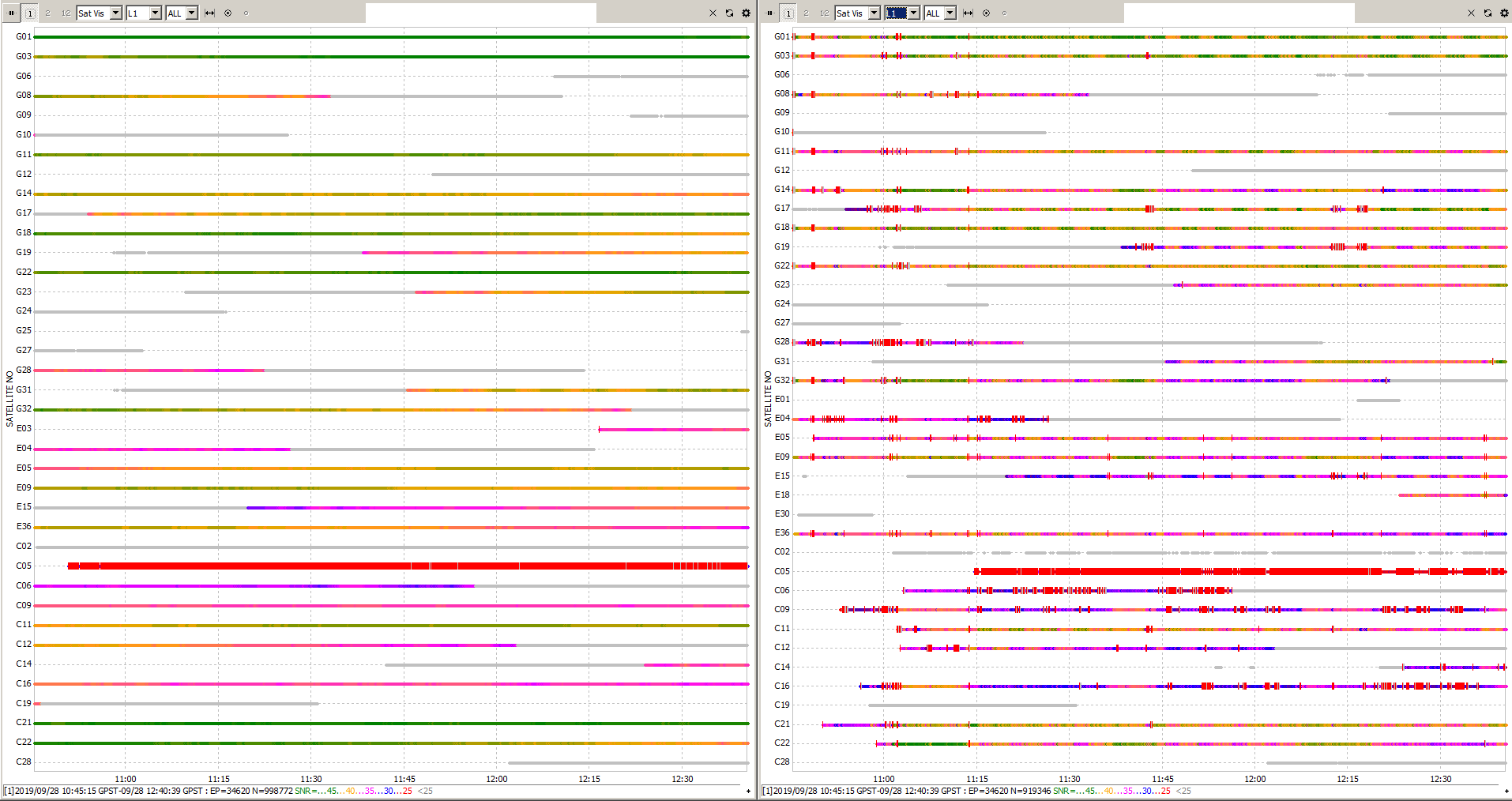
The SNR of my base (Reach RTK, left) with a 12 cm groundplane and a 100% clear sky view and my uav mounted Reach RTK with a 7 cm ground plane (right).
What I will have to do is to invest more into noise shielding (you can actually see in the graphs that I added some aluminum tape at around 11o’clock). I would be very interested in some images and concepts how others do it. I will try to shield the antenna better.
I’m not so sure whether the power source, the time mark connector and the rx/tx to arducopter are a source which need to be improved too. Any concepts what you do to improve your SNR and reduce cycle slips?
Here are the images (motors and camera covert for protection, improvisational style…), what do you suggest? How did you do it? Would you also post some images? I would also be very interested to see the SNR results of other setups to get an impression what is possible.
Oh, I did not know I can influence that. Is that done in ReachView within RTK settings? I though that that has no impact on raw logging. Are there any recommendations for the settings?
you could be right; it may not affect logging. I haven’t looked too closely. No recommendations, but just as with elevation mask when logging data for post processing, having more data than you need is always better than less. So if it does then having it set as low as realistically usable is good. I have set 25.
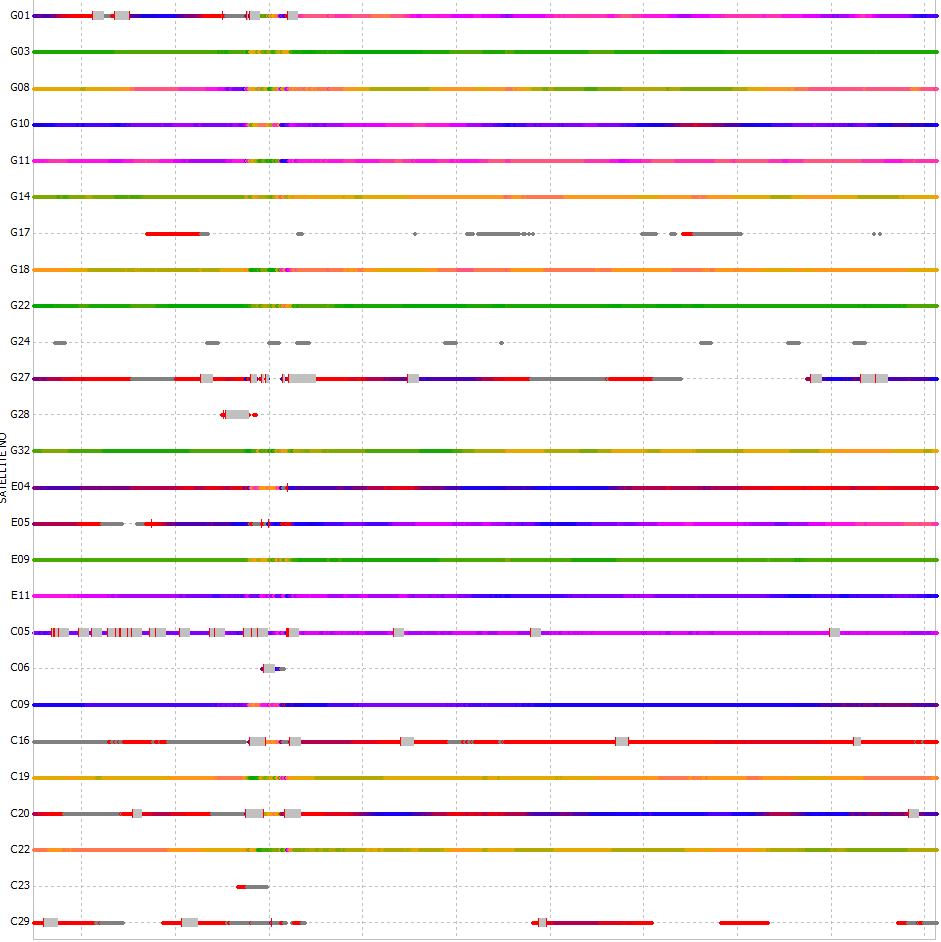
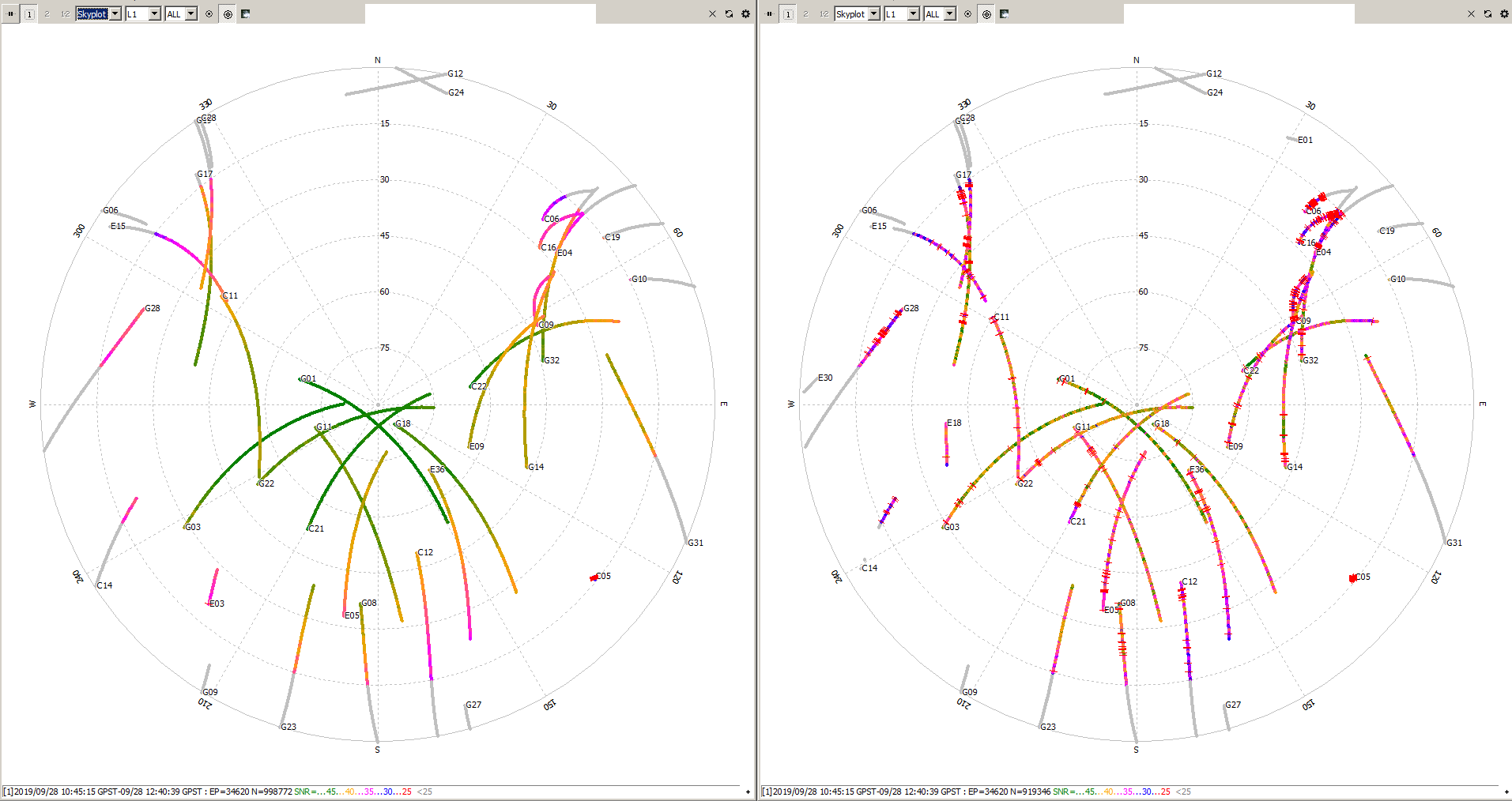
I notice in your plots your SNR seems to show a directional influence. I’m assuming your tracks for each satellite are changing colour when your drone is flying your lines up and back. Perhaps your groundplane is tilted inappropriately for flight attitude. You’ll notice some of your satellites are strong SNR down one line while others are weak, then colour changes coming back. Mine is canted backwards at about 10° so as to be roughly level as the UAV is flying forward in normal flight.
Also trimble uses non reflecting material (plastic or other) to absorb signals as a way of multipath mitigation with some of their antennas. Perhaps your plastic edging is having an effect on groundplane performance. Or not? It’s just another thing to try. I’m going to be testing a circular groundplane to see if it performs any differently to a square(ish) groundplane.
BeiDou tracking seems to be poor most of the time for GEO satellites (C01-C05) for me too. Lots of cycle slips. Just exclude these from processing.
Yes, you are right, you can even determine the heading by looking at the SNR values It is interesting that the impact is that high eventhough the groundplane is small and the satellites are so high above the horizon.
The problem is that one would also have to tilt the groundplane when flying with wind from the site (the heading was 0 and 180, it was West wind, the problem is caused by roll, not by pitch). That is what I prefere (when I fly with strong wind) because the power requirement stays the same which gives me a better insight into the current discharge status of my batteries and because I can fly in a way that the copter starts from a point where the wind is coming from and will get closer to me as the battery depletes. If I fly with the wind I also will pitch for -15 or -20 degrees to break, so this would also affect the reception.
I think for me, flying with wind with more than 20 km/h almost all the time I cannot do your mindful trick to tilt the antenna. I will have to improve the SNR as far as possible and accept the changing SNR values.
@wsurvey how to you plan your flight paths heading?
I will do a test if the 3d printing material (petg) influences the reception.
I use a round groundplane with my base (aluminum, compact disc size 12 cm I think) and a square one (10x10cm) with my rover. I cannot see any significant differences in performance. Tilting the rover for some degrees seems to make far more difference than the ground plane.
I also will improve the noise shielding of my base and rover, I think that noise is a major problem with those devices.
purely geometrical concerns. Either for shortest flight if battery might be an issue, or based on the features of what I’m flying over. I don’t do any planning for the prevailing wind/breeze, but I don’t live in a windy part of the world so I wouldn’t normally have to.
I also have plans to test a spiral antenna if i can find a cheap antenna, and cable that has correct connections for spiral antenna to emlid reach M+.
You are lucky! I would prefere to live some where it will be summer soon and where there is not that much wind ;-).
It would be great if you could test a cheap helix antenna, this might solve the problem and I would be very happy to rely on your expert judgement when choosing the right one.
The Harxon HX-CHX600A seems to be quite good, but I guess that is connected to some serious amount of money.
Maybe @VanavaraDigital is reselling his helix antenna and cable for a good price?